
 阅读时间大约10分钟以上(4810字)
阅读时间大约10分钟以上(4810字)
2025-05-15 人形机器人灵巧手全景透视:行业、技术、企业一网打尽
来源:人形机器人场景应用联盟
谁是灵巧手最强玩家?
出品:人形机器人场景应用联盟
在人形机器人的产业链结构中,灵巧手通常位于系统层与执行端之间,与感知模组、机械臂、电控系统高度耦合,成为人形机器人“可落地”的关键瓶颈之一。灵巧手等执行机构的能力,直接影响整机的使用效率、适应能力与场景延展性。
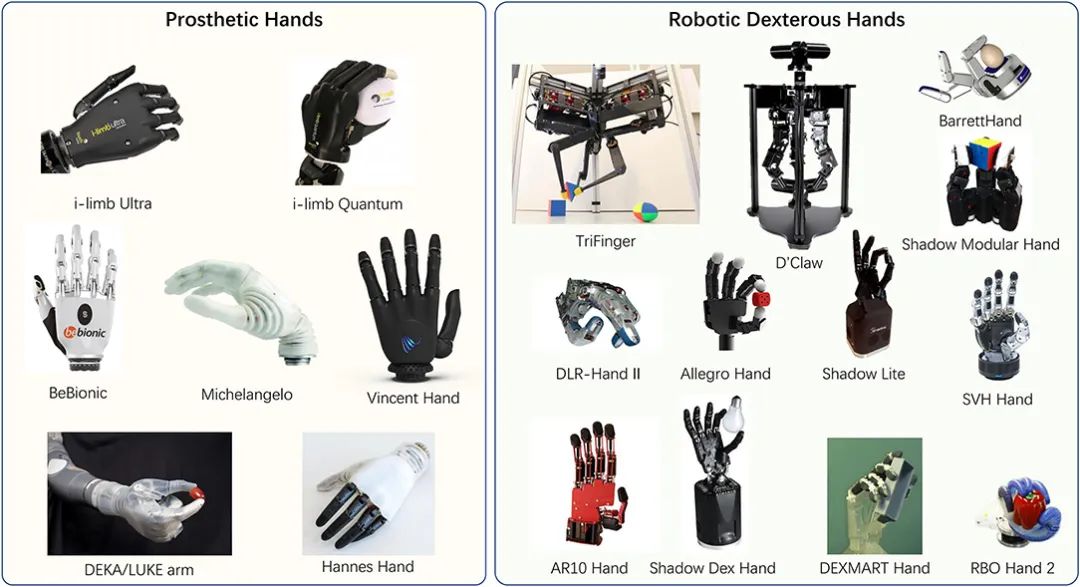
图源网络:左侧为假肢仿生手,右侧为机器人灵巧手
本文将从行业分析篇、市场趋势篇、代表性企业推荐篇三大维度全面分析人形机器人灵巧手行业的发展现状及趋势。
01
行业分析篇
1.灵巧手的基本概念及分类
灵巧手是机器人操作和动作执行的末端工具,在机器人学领域属于末端执行器的范畴。
灵巧手模仿人手的结构和功能,是实现复杂抓取、操控与人机交互的重要支撑。其核心价值在于赋予机器人类人的精细操作能力,使其不仅能完成粗略搬运任务,更能胜任高精度装配、灵敏交互、动态抓取等多样化工况。
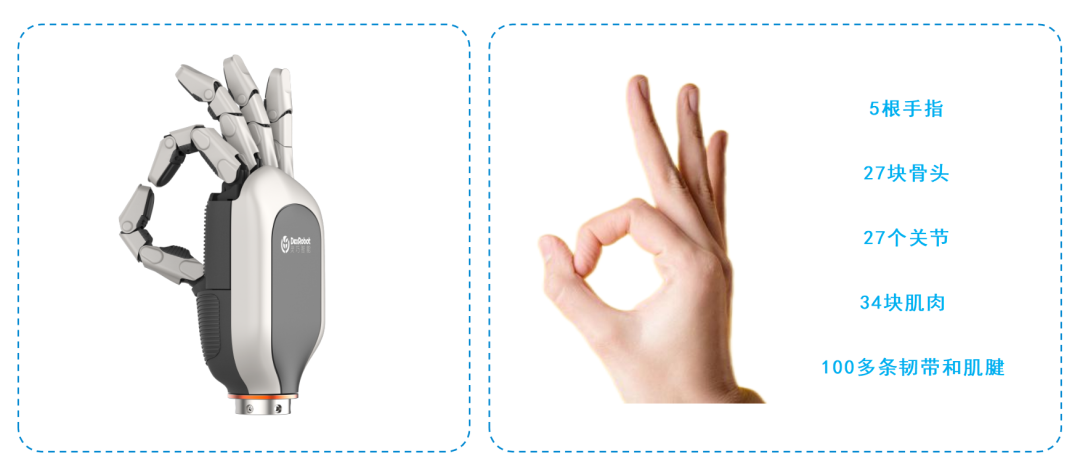 图:机器人灵巧手与人手的对比
图:机器人灵巧手与人手的对比
灵巧手可以根据多种标准进行分类,主要包括以下几种:
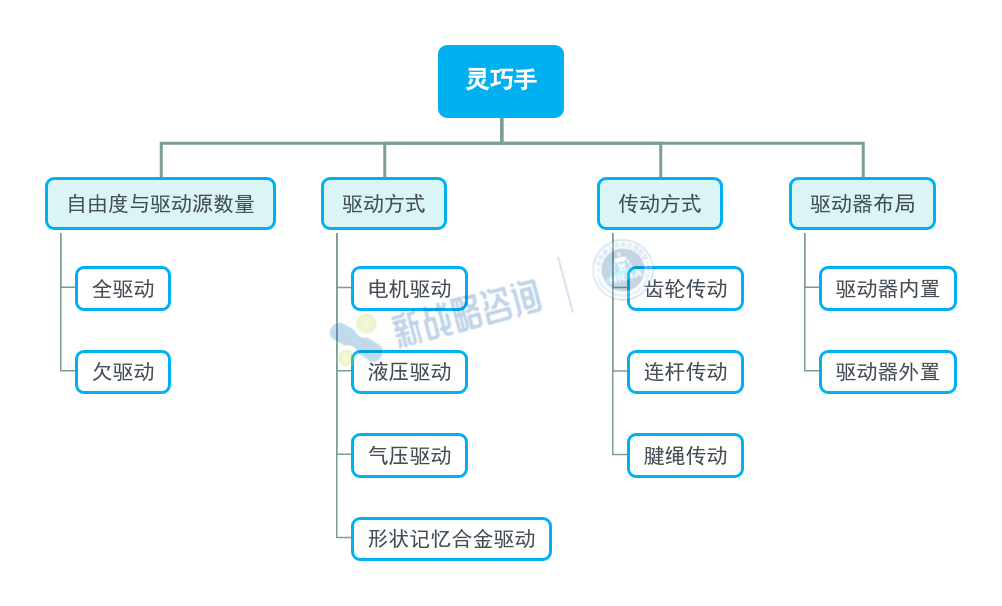
图:机器人灵巧手的分类
(1)按自由度与驱动源数量分类:
全驱动
自由度数量与驱动源数量相等,控制精度和灵活性高,但成本较高。
欠驱动
自由度多于驱动源数量,成本较低,但精度可能有所损失
(2)按驱动方式分类:
电机驱动
是目前的主流方案,具有成本较低、体积小、调控方便等优势。
液压驱动
成本较低,但刚度低、动态性能差。
气压驱动
同样面临刚度低的问题。
形状记忆合金驱动
主要用于实验阶段,具有驱动速度快的特点,但耐久度低。
(3)按传动方式分类:
齿轮传动
通常包含蜗轮蜗杆,使用微型谐波减速器等实现传动齿轮驱动,精度最高,但成本极高。
连杆传动
采用平面连杆机构传动,由多个连杆串并联混合的形式传递运动和力矩,适用于假肢等领域。
腱绳传动
结构简单、控制灵活但控制精度不高、抓取力不足。
(4)按驱动器布局位置分类:
驱动器内置
电机位于灵巧手内部,手指的体积较大,控制精度较高,但不同手指均可使用同样的模块化设计,可维修性较强。
驱动器外置
电机位于手臂,空间较大,可以选用更大的驱动电机,且手指可以设计的更纤细,但控制精度较低。
2.灵巧手的产业链结构
灵巧手涉及驱动机构、传感模组、结构设计、电控系统等多个专业门类,产业链条长、耦合度高:
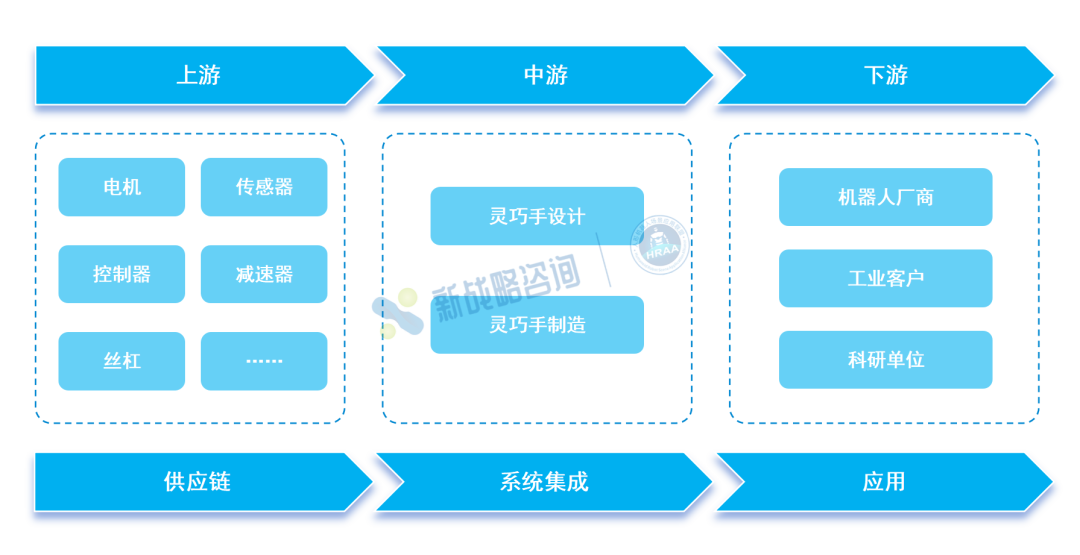
图:机器人灵巧手的产业链结构
上游环节:包含微型电机、柔性传感器、低摩擦材料等;
中游系统集成:包括灵巧手设计与制造企业,负责机械、电控、软件等一体化方案;
下游应用:面向机器人厂商、工业客户、科研单位等。
目前行业尚未形成统一标准,组件接口、传感逻辑、电控协议存在较大差异,系统兼容性成为制约灵巧手扩展能力的重要因素之一。
3.灵巧手产业的发展历程
早在20世纪70到90年代,MIT人工智能实验室、斯坦福大学等机构便开始对多自由度、多传感、多材料的机器人手进行探索。进入21世纪后,随着材料科学、微型驱动、电机控制和传感器等技术的突破,灵巧手产品逐步从实验室走向产业化,成为全球机器人企业竞争的新焦点。

图:机器人灵巧手的发展历程
4.行业竞争格局分析
当前灵巧手行业呈现出“科研型平台+技术型初创+整机厂自研”的多元竞争格局,同时也吸引了部分零部件厂商跨界入局,形成了较为复杂的技术生态:

图:机器人灵巧手的竞争格局
科研型平台:如Shadow Robot、IIT(意大利技术研究院)、DLR(德国航空航天中心)、中科院自动化所、各地人形机器人创新中心等,拥有深厚的技术积累,产品以技术验证和模块化平台为主。
技术型创企:专注核心传感器、驱动器或整体结构优化,如美国的Proception、中国的灵巧智能、傲意科技等,聚焦单项突破或系统集成。
整机厂自研路线:如特斯拉、星动纪元、智元机器人、宇树科技、戴盟机器人等人形机器人整机厂商,基于自用需求加速灵巧手的内部研发并闭环测试。
零部件企业跨界:除此之外,还有一些原本专注于传感器、电机等其他核心零部件的企业也开始涉足灵巧手开发,如速腾聚创等。
02
市场趋势篇
1.市场规模与增长趋势
根据《MarketsandMarkets》与《Interact Analysis》等第三方调研数据,截至2023年,全球机器人末端执行器市场已突破45亿美元规模,其中灵巧手占比虽不足10%,但增速显著,近五年年均复合增长率超过25%。预计到2030年,灵巧手全球市场规模将超过80亿美元,进入高速增长期。
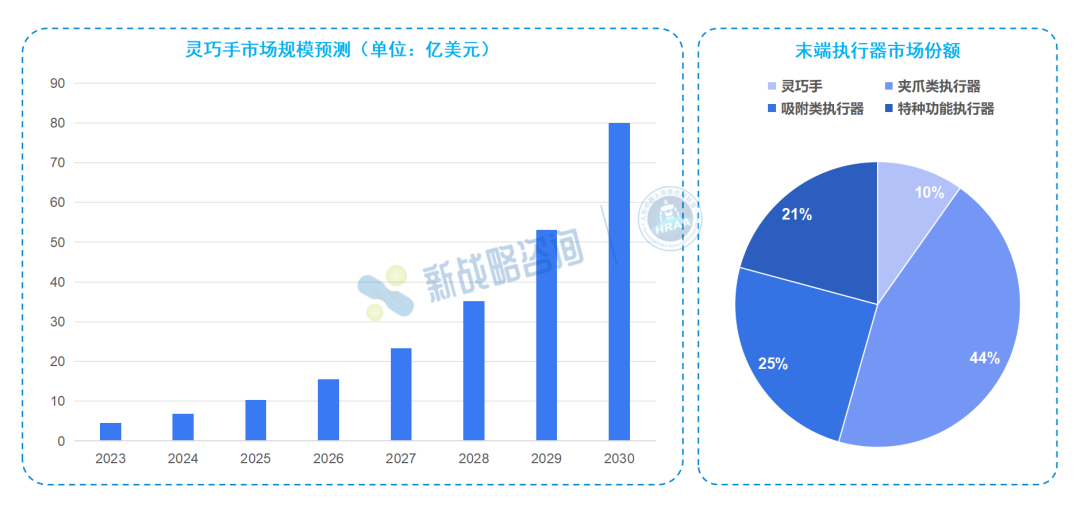 图:机器人灵巧手的市场规模预测及末端执行器市场份额
图:机器人灵巧手的市场规模预测及末端执行器市场份额
主要驱动力包括:人形机器人进入试点与量产阶段,对高性能灵巧手需求持续释放;工业4.0与智能制造浪潮推动装配/分拣流程升级;服务机器人拓展至护理、康复、零售等多元场景,对“安全、高精度、多功能”末端手提出更高要求。
2.区域市场分布
目前,灵巧手技术和市场主要集中于欧美、东亚三大区域。美国在研发能力与产业应用上居于领先地位。欧洲依托强大科研基础(如德国DLR、意大利IIT)和制造优势,产品稳定性突出。中国在政策推动和产业集群作用下快速追赶,形成了包括灵巧智能、智元机器人等在内的新兴企业梯队,部分产品已应用于本地制造业和高校科研项目。
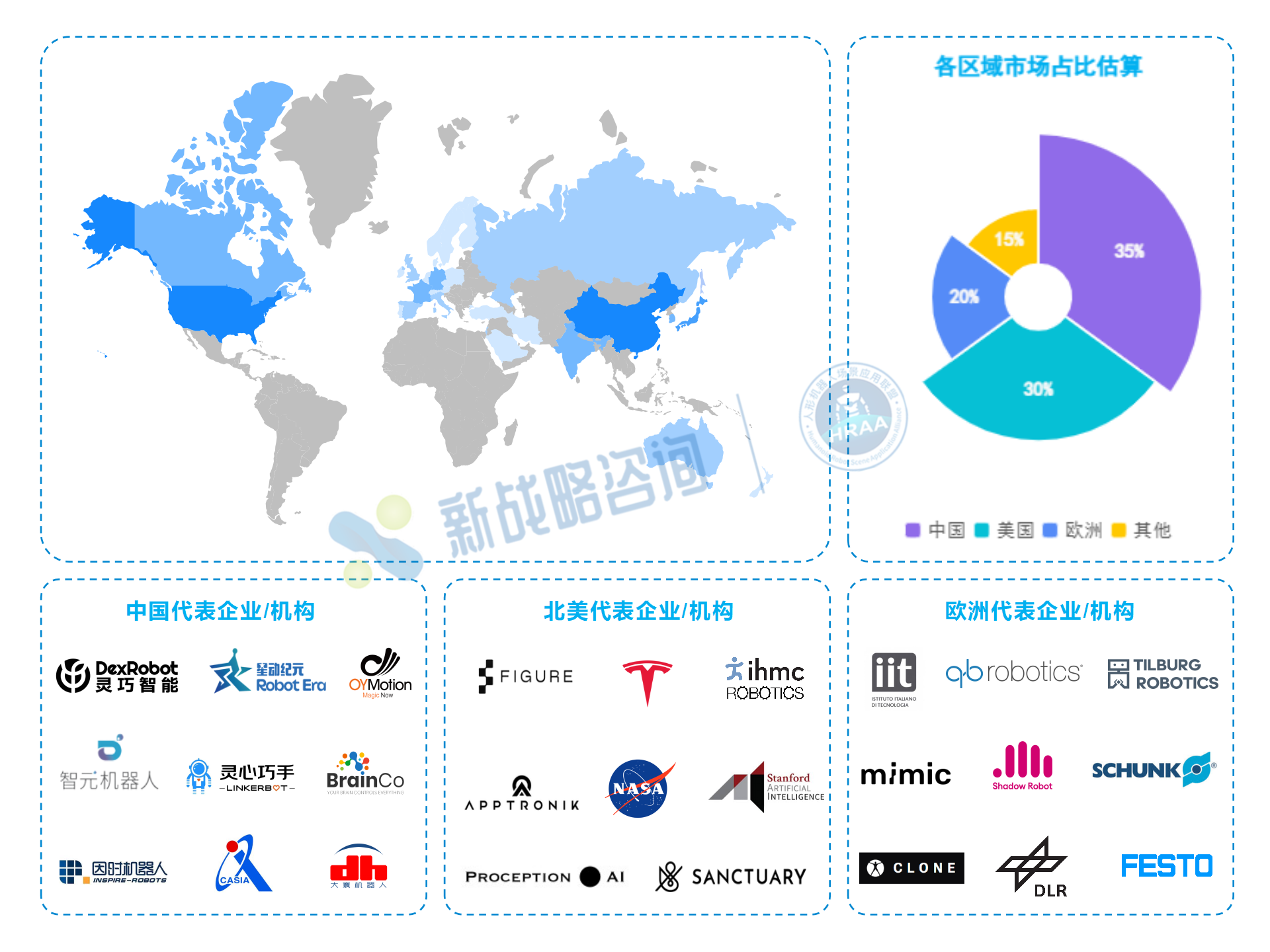 图:机器人灵巧手的区域市场分布
图:机器人灵巧手的区域市场分布
3.应用场景与需求分析
(1)工业场景
在3C电子、汽车零部件、医疗器械等高精密装配行业,传统刚性夹爪或二指抓手难以适应多变工件的形态、材质及操作策略。灵巧手凭借其多自由度、多模态传感与自适应控制能力,能完成螺丝拧紧、柔性组件组装、缆线插拔等复杂任务,成为柔性制造生产线升级的重要工具。
(2)服务场景
服务机器人广泛应用于康养护理、家庭助理、酒店配送等领域。灵巧手可协助完成如握持水杯、整理物品、开关门等典型动作,对于提升服务智能化和拟人交互体验至关重要。
(3)科研与教育场景
灵巧手作为前沿机器人平台的重要组成部分,被广泛用于人工智能、计算机视觉、人机协作等方向的实验验证。高校、研究机构在机器人感知与控制、机械结构优化、交互建模等多个研究课题中大量采用灵巧手系统,如哈工大、北航、同济大学、清华大学等均在教学与科研中配备国产或进口灵巧手平台。
4. 市场挑战与风险因素
(1)成本结构压力
灵巧手作为复杂度极高的部件,研发和制造成本一直居高不下。业内普遍估计,灵巧手成本占整机人形机器人成本的20%~30%。以特斯拉第二代Optimus机器人为例,其双手成本约占整机的17.3%,折算约每只手成本8650–10380美元(人民币6万~7.3万元)。
目前市面上的灵巧手产品公开售价从几千元到十几万元不等。而英国仿生灵巧手老牌企业Shadow Robot的灵巧手单台售价甚至几十万到上百万元。
 Shadow robot三指灵巧手
Shadow robot三指灵巧手
如此高昂的成本限制了灵巧手的大规模商用部署。目前厂商面临的难题是如何在保证性能的前提下降低成本。核心部件如微型高扭矩电机、精密减速器、力/触觉传感器等价格不菲,难以通过一般规模效应显著降价。如何在精度和成本间取得平衡,是灵巧手商业化必须解决的关键问题。
(2)技术成熟度与可靠性不足
目前大多数灵巧手仍处于“工程化验证”阶段,在高负载、长时间运行、多工况适应性方面存在性能衰减、维护复杂、失效率高等问题。如何提升量产一致性、降低维修频次,是从技术验证迈向商用部署的核心挑战。
(3)标准化与生态建设滞后
行业尚未建立统一的设计规范、接口协议与评价体系,导致同类产品在可替代性、兼容性与可拓展性上存在障碍。缺乏统一标准亦阻碍了产业链协同发展,提升整机适配门槛,延长研发周期。
5.技术与市场发展趋势
(1)技术趋势:从“可动”向“可用”演进
驱动方式多样化,结构设计更仿生:当前主流包括伺服电机+减速器、腱绳驱动和软体执行器等路线,各有适应场景。随着人形机器人轻量化趋势加快,更小型、更柔顺的驱动模块成为设计重点,腱绳+柔性关节方案受到关注。
传感融合技术提升“操作感知力”:高灵敏度触觉、力觉、滑移感知等传感器逐步实现低成本集成,使灵巧手能感知微小碰撞、摩擦和滑动,实现类人手的“握稳—松放—再调节”等动态控制过程。
智能控制系统向数据驱动与学习型演进:控制算法正从传统PID向“感知-决策-动作”一体化系统升级,强化学习、大模型+视觉+触觉联动成为前沿趋势,推动灵巧手具备自主策略生成与泛化能力。
平台化、模块化设计推动系统集成落地:越来越多厂商采用标准化接口、电控集成一体化、ROS兼容协议等设计,使灵巧手能快速适配不同机器人平台,形成“可插拔、易部署”的通用末端执行模块。
(2)市场趋势:由实验验证走向多场景商用落地
整机量产启动,配套需求大幅提升:随着Figure、Tesla、宇树、智元等公司宣布人形机器人进入量产或部署测试阶段,灵巧手作为核心部件需求同步增长,成为商业化落地的关键瓶颈之一。
工业场景优先突破,B端需求明确:在3C电子、医疗器械、汽车零部件等高精装配工序中,灵巧手可显著提升柔性化生产能力。目前已有企业开始在部分装配线、分拣线部署带灵巧手的机器人替代人工。
中端市场扩容,服务与教育需求增长:教育科研、轻工业、家用服务机器人等领域对成本控制更敏感,推动模块化灵巧手快速发展。国内企业在此类产品上具备“低成本+高自由度”竞争优势,推动市场下沉。
“方案即产品”趋势明显,场景联动成新增长点:灵巧手厂商不再仅售硬件,而是与整机厂商联合提供面向具体行业的“感知+执行”一体化解决方案,逐步从“单一部件供应商”升级为“复合能力集成商”。
03
代表性企业推荐篇
1.灵巧智能
浙江灵巧智能科技有限公司是一家以灵巧操作为核心科技能力的具身智能机器人企业,在2024年1月成立于浙江省绍兴市新昌县。公司由中国科学院院士机器人技术首席专家领衔,由硬核机器人科学家及专家合作组建,依托上海交通大学的科研实力与人才优势,共同推动人形机器人和工业机器人产业的发展,提高机器人末端执行器技术水平,实现通用智能多模态触视感知的灵巧操作系统(包括但不限于灵巧手本体、高载重比机械臂、高算力控制器、配套具身智能算法) 的研发、生产和销售。

DexHand021 具有19个自由度,其中主动自由度12个,被动自由度7个,驱动器内置在手掌内,采用电机驱动和键绳传动的方式,拥有像人手一样灵活的操作能力。在运动能力上,得益于创新腱绳传动技术和自研高功率密度驱动器,可实现单指1kgf力,能轻松应对不同形状尺寸物体的抓取和操作。

在感知能力上,灵巧手在指尖位置覆盖了高灵敏度触觉,关节位置传感器,能捕捉接触面上亚毫米级别的微小变形,赋予机器人丰富的触觉感知能力,还能为机器人末端执行器提供接近觉等信息。与此同时每个关节处均集成了位置传感器,保证灵巧手在抓取和操作过程中能准确地感知自身和物体状态信息。
灵巧手具备高度类人的灵巧操作能力,可以完成掌内转魔方、多物体抓取,并支持超过15种类人手的功能操作。在AI领域,灵巧智能开发出了用户所需的仿真环境、算法工具包和算法训练的外设备,可以为用户提供一整套解决方案。
2.帕西尼感知
帕西尼感知科技致力于交付行业优秀的全场景应用多维触觉传感器及人形机器人产品,为业内首家实现多维度大阵列触觉传感器及机器人产品批量商业化公司。公司创始成员来自于日本早稻田大学机器人实验室、法国国家科学研究中心、美国伊利诺伊大学香槟分校、英国帝国理工学院、清华大学等知名学府。目前,公司保持多维触觉传感器业内出货量及市占率首位。

帕西尼第二代多维触觉灵巧手新品DexH13 GEN2,是市场上首款融合多维触觉与AI视觉双模态能力的四指仿生灵巧手。双手搭载世界上最多的1956颗专业级ITPU多维触觉传感器,带来惊人的7824路触觉信号解析能力,赋予机器人如人类般细腻灵敏的触觉。除了领先的触觉感知,DexH13 GEN2还集成800万高清AI手眼相机,基于先进的零样本位姿估计视觉算法,拥有领先业界的卓越AI视觉物体位姿估计能力。

3.傲意科技
上海傲意信息科技有限公司成立于上海张江高科技园区。公司研发前沿的生物电传感器、神经信号AI识别技术、人机神经接口技术。产品专注于机器人灵巧手、智能脑电图机、智能仿生义肢、智能神经康复训练系统、可穿戴外骨骼设备等。
ROHand灵巧手是模拟人体手部运动的高灵敏度末端执行装置,由手掌,手腕,五个手指,电机,传动部件等部分组成。五个手指可以单独运动,在外部命令下可以做出不同的动作。共有11个运动关节,内置6个电机驱动器和电机控制电路,具有6个主动自由度。内置PID 电机控制算法,可以模拟人手实现多种抓取操作。
4.中科硅纪
中科硅纪(南京)机器人有限公司,由中国科学院自动化研究所孵化成立,来自于多模态人工智能系统全国重点实验室王鹏研究员团队,建立了包括研究员、副研究员、工程师,涵盖“算法-机构-软件-应用”等软硬结合,以及博士生、博士后在内的20余人的研究队伍。中科硅纪聚焦机器人灵巧操作能力,研发了“Casia Hand系列仿人灵巧手及机器人系统”,主要包括Casia Hand-H类人自由度灵巧手、Casia Hand-L通用型灵巧手和Casia Hand-S高速自适应灵巧手,以及面向不同应用场景的“无忧”服务机器人、“无畏”特种机器人和“无际”工业机器人等产品。
5.戴盟机器人
戴盟(深圳)机器人科技有限公司孵化于香港科技大学科研团队,在视触觉传感器、多指灵巧手设计与制造、类人行为学习与泛化、含视觉触觉的感知操作大模型等前沿领域深耕多年。
作为一款类人手部结构的新型末端执行器,DM-Hand1具有丰富的自由度,结合力位混合控制算法,可模拟人手实现精准的抓取操作。DM-Hand1采用了戴盟全球首款毫米级厚度的视触觉传感器。在保证高分辨率的基础上,突破性地将传感器厚度从几厘米缩小至几毫米,可轻松将其部署在人类指尖大小的空间,微型化设计极大地降低了灵巧手的手指厚度,提高了机器人的灵活性和适应性,使其在执行精细任务时更加“得心应手”。


推荐阅读


×
右键可直接复制图片