
 阅读时间大约10分钟以上(8615字)
阅读时间大约10分钟以上(8615字)
2025-05-27 一场“直面行业真问题”机器人比赛的万字观赛报告
来源:甲子光年
“我们希望让团队面对的,就是最接近真实落地的挑战。”
作者:王艺 苏霍伊 出品:甲子光年
近期,全球机器人与自动化领域最具影响力的学术会议之一ICRA(IEEE国际机器人与自动化会议)在美国亚特兰大举行。
今年有超7000名学者、企业代表和机器人爱好者等到场,当然还有众多的机器人和机器狗,看看这个视频就知道现场有多热闹了。
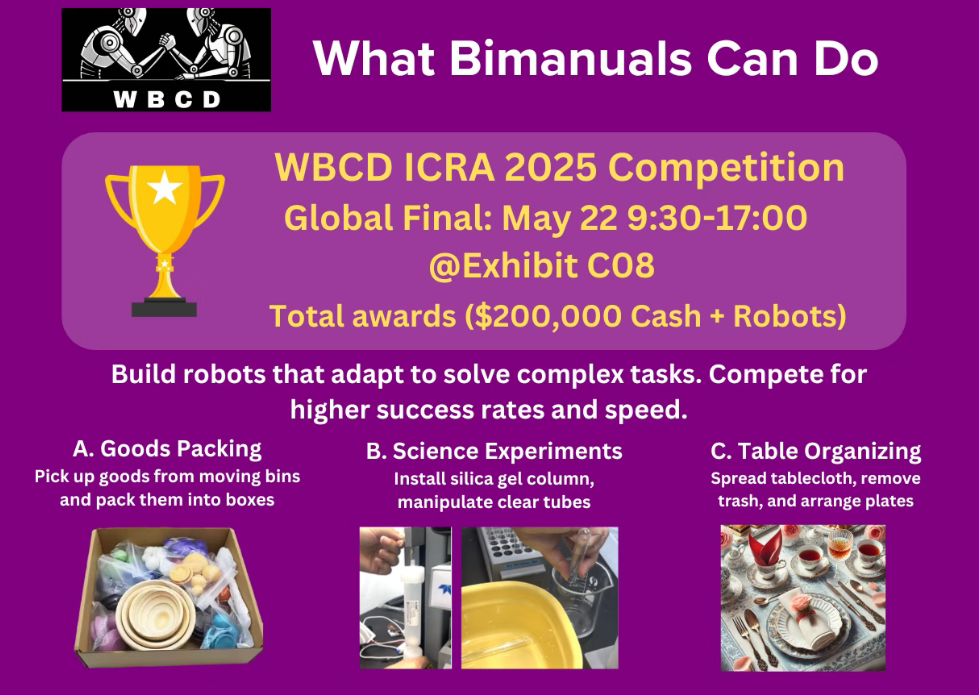
在这次ICRA上,我们注意到了一场与ICRA官方合作的赛事——探索双臂机器人能力边界挑战赛(What Bimanual Can Do,简称WBCD)。
WBCD海报,来源:WBCD
ICRA历年的挑战赛主要集中在移动导航(如SLAM和路径规划)、单臂机械臂操作(如抓取与分类)、多机器人协同、无人机飞行、人形机器人运动控制、仿真到现实(Sim2Real)迁移学习等方向。这些任务通常具备明确的评估标准、较强的复现性,技术相对成熟,便于参赛者从学术或工程角度进行系统优化。
相比之下,探索双臂机器人能力边界的挑战较为少见,因其涉及高维控制、多模态感知和复杂协同,在硬件和算法上都具有更高门槛,代表了机器人操作研究向更高复杂度和更强泛化能力演进的重要方向。
「甲子光年」在ICRA现场发现,麻省理工学院 (MIT) 计算机科学与人工智能实验室 (CSAIL) 的教授Tomás Lozano-Pérez和Leslie Kaelbling,以及加州大学伯克利分校(UC Berkeley)工业工程与运筹学系教授Ken Goldberg都来到了WBCD现场观看。
孙凌峰、许倬和Ken Goldberg 在比赛现场,图右: Tomás Lozano-Pérez和Leslie Kaelbling,图源:WBCD
WBCD是历届ICRA赛事中参赛团队最多、设备规格最高的比赛之一,主办方共设立了总额达20万美元的奖金池,由现金奖励与机器人设备共同组成,这也吸引了来自全球的88支队伍报名参赛。
来自加州大学伯克利分校、卡内基梅隆大学、苏黎世联邦理工学院、清华大学、上海科技大学等高校的科研团队,以及艾欧智能等来自产业界的团队参加了本次比赛,最终有15支队伍脱颖而出,晋级决赛。

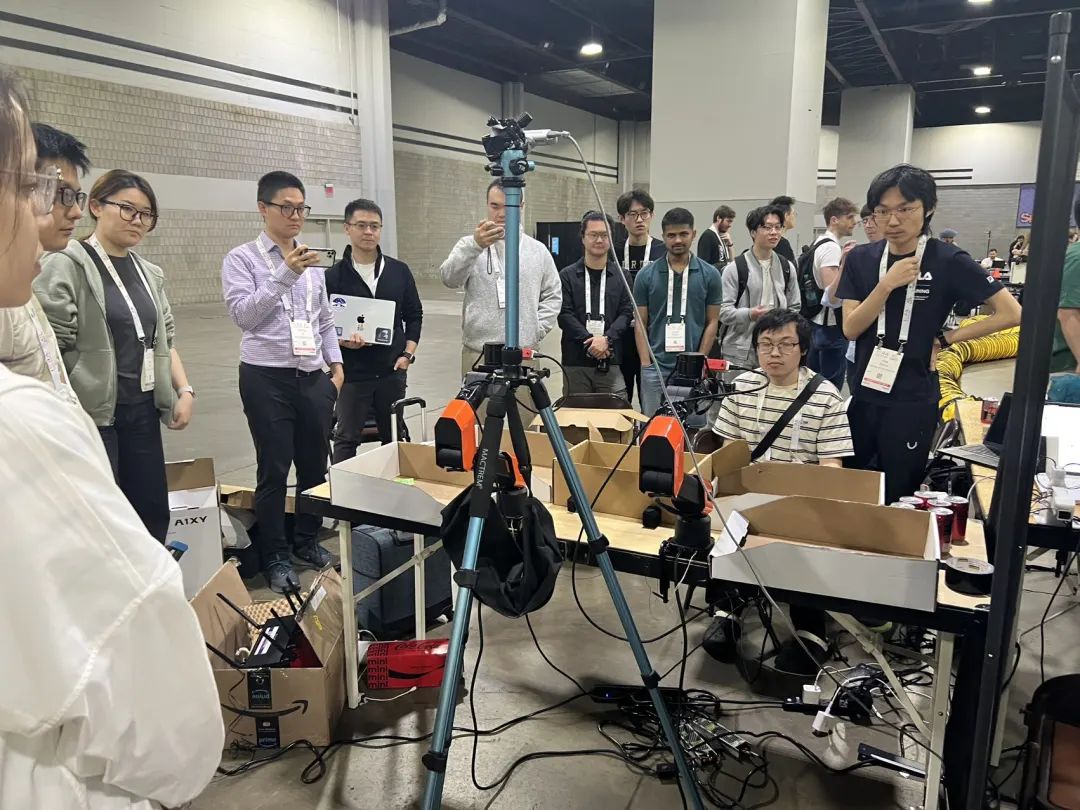
WBCD比赛现场,来源:「甲子光年」拍摄
WBCD以“真实场景验证”为核心定位,从机器人公司及市场的实际需求出发,在决赛设置了三个方向的挑战赛:生命科学实验 (Scientific Experiments)、物流打包 (Packing Logistics)、餐桌服务(Dining Table Service),重点关注双臂机器人自主感知、预测规划与精细操纵等落地性能。
为了方便不同团队参赛,主办方提供了相应的机器人,大家更多比拼的是背后的机器人系统以及软硬件的结合能力。
WBCD发起人、谷歌DeepMind研究员许倬告诉「甲子光年」:“WBCD挑战赛的任务全部源自真实场景,由有实际需求的企业提供业务背景和物料。我们想让机器人的科研不再‘自嗨’,真正出去见见世面。”

WBCD发起人、Google DeepMind研究员许倬在颁奖晚宴发言,图源:「甲子光年」拍摄
许倬认为,如今的机器人研究往往停留在自我验证的阶段。每个团队都有自己的demo,但大家没在一个标准下、一个任务中当面比过。另外,一些研究人员会为了突出自己的优势而设计一些“玩具任务”,这属于“拿着锤子找钉子”。
“人工智能之所以发展这么快是因为有很多benchmark让大家可以卷,但是机器人没有这样的benchmark,容易闭门造车。所以有时候并不是技术的问题,而是大家根本没机会在相同试题的考卷上写答案。”许倬说,“大模型有LMSYS Arena Challenge这样开放、互通、可比的竞技平台,我们想做机器人领域的LMSYS Arena Challenge,让不同系统在真实任务中‘切磋交锋’ ,同时我们之后也会优化并开源比赛内容供大家复现。”
这种脚踏实地、坚持技术落地的态度也打动了许多支持者。DataWiz CEO张雁就是其中之一。她为WBCD提供了大量资金支持,在接受「甲子光年」采访时谈到,她支持这个比赛的出发点很简单,“就是鼓励这些年轻人敢想、敢试,并且有机会坚持做下去”。
而“直面真实的业界难题”的理念也吸引了来自工业一线的选手。
来自苏黎世联邦理工学院的Davide Liconti说:“我们在自己的实验室里做演示总是容易的,但真正有参考价值的是当你和其他团队站在同一起跑线上时,你的系统表现如何?这是一次很好的‘对照实验’,也可以看清楚不同技术方案在真实任务中的差异。”
那么,这场“直面真问题”的WBCD挑战赛的具体情况如何?比赛中出现了哪些新的技术呢?「甲子光年」在ICRA现场与多个参赛团队、行业专家及活动主办方进行了交流,整理了一份详细的观赛分析报告。
1.生命科学实验挑战赛:精度与稳定性的极致考验
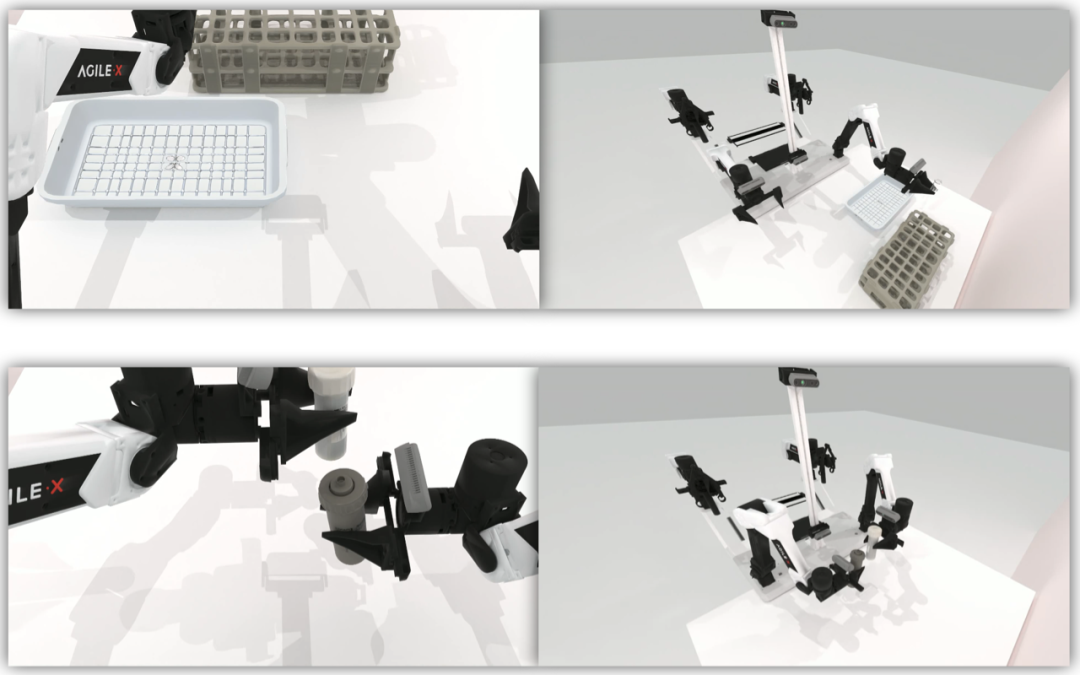
在生命科学实验挑战赛中,参赛团队要使用松灵(AgileX)机器人,执行模拟科学实验操作,包括安装硅胶柱、操作透明试管等,测试机器人在精细操作和复杂任务协调方面的能力。
生命科学实验挑战赛负责人、Robotics and AI Institute(RAI)研究员孙凌峰认为,只有把硬件、软件两个方面都解决好了,才能让机器人完成精细化操作任务。
类似问题在药物合成实验中尤为明显。孙凌峰介绍:“真实实验中,移液等步骤缺一不可。我们希望参赛系统能从泛化性角度出发设计完整应对全流程的软硬件系统,而非只针对单一环节做特化。真实的生物实验系统里也存在更多更有挑战的变化。”
比如,比赛中有一个“纯化”的任务。
“纯化”是指在合成反应完成后,从反应混合物中分离出目标产物。合碳智能创始人&CEO、药明康德前资深副总裁陈志刚介绍,在药物合成的实验中,“纯化”环节“非常耗人力”。
“过柱”是“柱层析”的俗称,是实验室中最常见的一种“纯化”方法。
对实验人员而言,像“过柱”这样的操作,既耗时又枯燥。虽然市面上已有自动过柱机可以完成部分步骤,但要实现真正的全流程自动化,仍有不少细节难点待解。每一个看似简单的对准、连接、稳压动作,背后都需要极高的精度和协调控制。
“要用机器人真正解放化学家的双手,得先啃下这块‘自动化的硬骨头’。”陈志刚告诉「甲子光年」。
而WBCD中的生命科学实验挑战赛正是对这一命题的集中回应。各参赛团队也给出了不同打法,有的选择加强人对机器的控制效率,有的则专注提升机器人自身的感知与决策能力。
洛桑联邦理工学院Josie Hughes教授团队的两位成员带来了自研的机器人系统,可通过线控的方式操作机器人。
整套机器人系统完全由硬件设计和线控机器人专业的博士后郑洪翰(Paul Hung Hon Cheng)搭建,包含Master线控操作系统和Slave机械臂。
该团队另一位成员、机器学习专业的博士生潘铖(Cheng Pan)向「甲子光年」介绍,线控的优势在于“更直接的控制反馈和较低的系统复杂度”,相较于VR遥操作信号反馈更有力;而相较于通过位置控制的遥操作设备,线控则可以更自由地扩展操作空间。
值得一提的是,该系统可扩展支持两台以上的执行机械臂,操作人员可在挂载多台机械臂的线缆上自由选择使用哪一台。
由于对准的孔径很小、遥操作也没有深度信息,机械臂在连接反应柱并将其放到插座的环节花了不少时间,但最终郑洪翰通过安装在机器人头部和手腕处的多个摄像头的帮助,仍然在众多参赛队伍中率先完成了比赛。
来自深圳的跨维智能则没有强化人工遥操作,而是试图通过大规模模拟与感知训练,让机器人“自己学会如何动手”。
三星电子前首席工程师金毅带领团队采用Real2Sim2Real VA (Vision-Action)+经典算法的分层控制架构。这听起来颇为绕口,但背后目标很明确:让机器人能“看清楚”试管、“分得清”烧杯,并在实际操作中“稳稳地动手”。
金毅团队在自研引擎DexVerse中构建了大量透明物体的模拟环境,搭配各种光线条件与传感器参数,使得系统在虚拟世界中反复练习。在DexSim模拟器中,又进一步加入物体位置、姿态、光照、材质等变化,进行高强度的“环境打扰训练”,让模型习惯在不确定的情况下做出稳定反应。
而来自美国西北大学的用到了松灵(AgileX)的新发布的Pika多功能数据采集夹具,一方面可以在没有机器人的情况下直接用来收集数据进行策略训练,另一方面在比赛里也可以随时切换为遥操作系统操作机器人接管。值得一提的事,美国西北大学团队本次挑战赛中是唯一混合了两种方式解决任务的队伍。
最终由于得分相同,洛桑联邦理工学院和跨维智能的团队获得了生命科学实验挑战赛的并列冠军,美国西北大学的团队获得了季军。
除了前三名的团队,其他团队也各有亮点。
加州大学伯克利分校机械工程系的梁博远,在操控方式上颇具巧思,采取了“手脚并用”的遥操作方案,远远看去就像是在“操控飞行器”。
他们通过GELLO和Phantom力反馈设备结合的方式,将系统划分为两组:一组负责大范围的粗略移动,另一组处理小范围的精细操作,两者之间的切换由脚踏板控制。这套方案来自美国工程院院士、控制领域权威Masayoshi Tomizuka教授领导的实验室。

加州大学伯克利团队在操作松灵机械臂,图片来源:「甲子光年」拍摄
艾欧智能把操控席设在了地球另一端——技术人员在深圳总部,远程操作位于美国会场的机器人。
他们是如何做到的呢?
艾欧智能AI算法研究员曹玥告诉「甲子光年」:“为了让指令准确传到现场、反馈顺利传回操作者手中,我们把控制端部署在国内,把负责控制解析和数据存储的TeleBox安在了美国现场。”
通过艾欧智能自研的平台TeleXperience,两端之间实现了跨公网的稳定通信。再加上一套专为这个系统开发的通用控制器,现场的机械臂能够稳定接收指令,没有出现卡顿或中断。
最终,艾欧智能和同样采取跨城遥操作(纽约到亚特兰大)的、来自新加坡的创业公司Frodobot一同获得了最佳应用奖。
2.物流打包挑战赛:速度、规划与灵巧性的多重博弈
在物流打包挑战赛中,参赛团队要使用星海图(Galaxea)机器人,完成从移动货箱中抓取商品并装箱,考验机器人的精确抓取和放置能力。
机器人需要在上塑料筐内抓取多样商品并高效装箱,其中打包是最难的环节。而在实际电商仓库中,打包也是耗时最长、人力最密集的环节。
“我们想考验机器人在这方面的能力,尤其是将尽可能多的物品整齐放入有限空间。东西越多,盒子越满,任务就越难。”物流打包挑战赛负责人、星猿哲科技CTO俞冠廷介绍。

物流打包场景中使用的星海图机器臂,图源:「甲子光年」拍摄
来自卡内基梅隆大学刘畅流实验室的团队,用一套结合遥操作和自动控制的系统完成了比赛。整个系统建立在一种neural-symbolic(神经–符号)架构上:视觉神经网络负责识别视野中的物体位置,而符号推理模块则从技能图谱中“调出”最合适的动作方案,指导机械臂完成抓取。
这个方法的一大优势是对数据的依赖很低。只需要少量样本,就能让机器人学会准确的操作技能,结合后续的数据增强训练,他们在比赛的30分钟内成功抓取了80多件物体,拿下冠军。
卡耐基梅隆大学团队,图源:「甲子光年」拍摄
「甲子光年」注意到,来自产业界的参赛者也在借助这场比赛检验自身技术的成熟度和竞争力。
比如,印度塔塔集团的TCS Research团队通过自研的动态运动参数(Dynamic Motion Parameters,DMP)算法和3D视觉定位模型的配合,拿下了物流打包挑战赛的亚军。

塔塔集团研究院的成员,图源:「甲子光年」拍摄
获得物流打包挑战赛季军的是普渡大学MARS实验室团队,由余宇老师指导。
该团队一开始也采用的是具身模仿学习(VLA)的方案, 利用UMI夹爪配合3D ViTac触觉传感器采集示范数据,并通过Diffusion Policy进行策略训练。为了保证比赛顺利完成,他们临时切换方案,改用Meta Quest进行遥操作,完成了任务。
还有一些没有获得名次,但让我们印象深刻团队和个人。苏黎世联邦理工学院团队就是其中之一。
他们这次携带了其最新开源的灵巧手Orca Hand参赛,采取了类似分层决策VLA模型——“高层推理,低层执行”的策略来做机器人的控制系统,灵巧手的五指设计让其在抓取三角形魔方和光滑表面可乐瓶的时候更容易,也能执行更精细的放置动作。基于客观因素,他们改成了遥操作的方案。
遗憾的是,团队在比赛的后半程遥操作员手误不小心打翻了箱子导致被扣了分数,但其仍然凭借着灵巧手高效的抓取能力获得了“打包赛道最佳夹具设计(Best Gripper Design in Packing Track)”奖项。
问到开源Orca Hand的原因时,团队成员Philippos Katsimalis回答:“单靠我们这个小团队,是做不出完美系统的。只有把项目开放出来,让更多人使用、反馈、修正,它才能变得越来越好。”

Orca Hand,来源:「甲子光年」拍摄
还有一位凭借热爱“单枪匹马”参赛的个人开发者。
他叫Davide Heydt,是一位从德国远道而来的机器人爱好者。早在2010年,他就开始开发Web应用程序;2016年,他用树莓派、WebRTC和Android应用搭建了自己的第一个基于VR的遥操作系统。在这次比赛中,他同样选择遥操作的方式控制机器人。
据他介绍,自己开发的算法几乎可以部署在任何机器人上,“不需要任何预训练经验,一旦完成初始设置,每个人都能快速上手控制机器人。”
这次参加比赛,Davide Heydt一方面是想在工业级硬件上验证自己的系统,另一方面则是“希望能赢一台全尺寸机器人带回家”。

Davide Heydt获得Finalist in Packing Track奖,来源:WBCD
3.餐桌服务挑战赛:生活场景中的泛化与协同
在餐桌服务挑战赛中,参赛团队要使用方舟无限(ARX)机器人,完成铺桌布、将食品封装在保鲜盒等日常操作。由于流程较长、动作较复杂,目前市场上不存在完整的技术解决方案,相关的demo和数据集也很少,这对具身模型的学习和机器人的操作都是难题。
World Engine AI的创始人&CEO黄迪深度调研了自动餐厅和自动厨房的场景,发掘了该场景里有巨大价值的环节,如将食品封装在保鲜盒。
“我们看到了很多团队在通过遥操和端到端模型混合的方案在做尝试,希望能形成数据和模型的迭代飞轮,这个实际工程周期会很漫长。如果我们能解决餐桌场景的问题,其实也意味着General Purpose Robot又往前迈了一大步。我们设置这个赛道就是希望能看到参赛团队能不停迭代,找到一条真正未来能实现商业化的路径。”黄迪说。
作为餐桌服务挑战赛的机器人提供方,方舟无限CEO张鑫亮对于挑战项目解释道:“我们没有刻意选择简单的pick and place,而是选择了柔性物体,及双臂协同对力反馈敏感的任务。希望激发大家更多创意,定义未来1-2年内学术界和产业界共同努力的方向。”
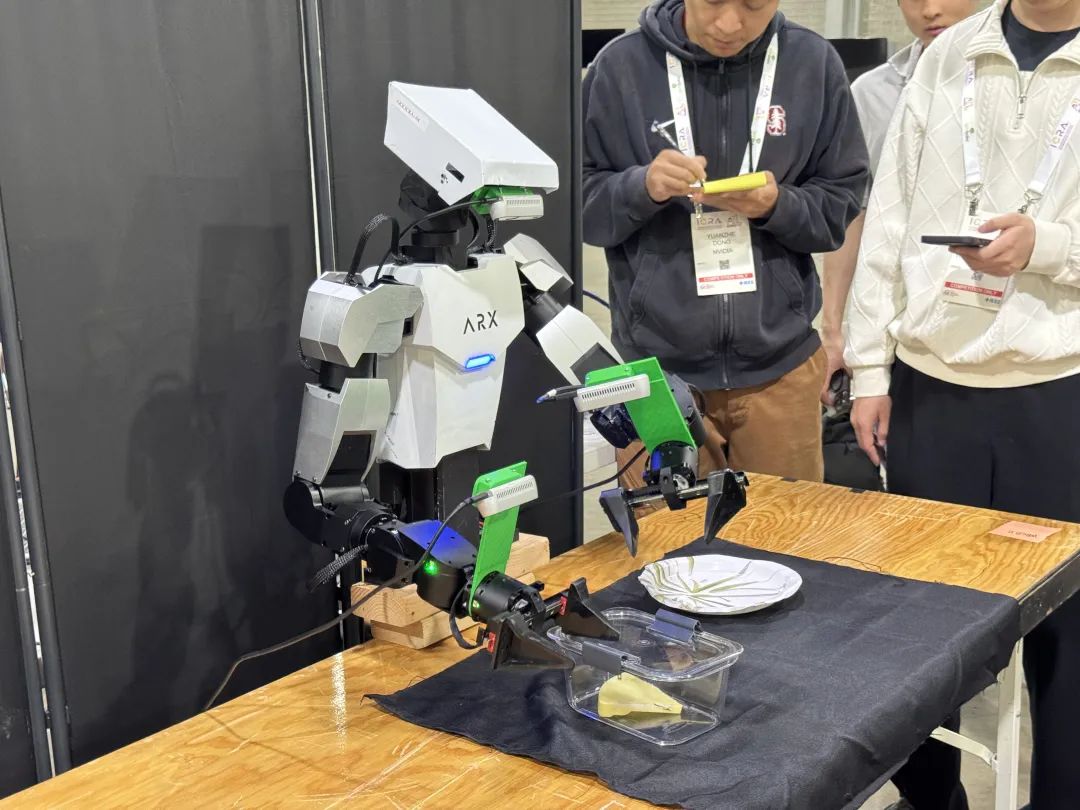
餐桌整理场景的方舟无限机器人,图源:「甲子光年」拍摄
餐桌服务挑战赛的冠军是“奶龙队”,其成员自清华大学、西北大学、佐治亚理工、密歇根大学香港科技大学和新加坡国立大学苏州研究院。他们前期采用遥操收集数据,训练模型的方式来准备比赛,但是由于比赛时间紧迫,最终切换成了远程遥操的方式。
“我们很早以前就在一起搞科研和搞“抽象’。”奶龙团队成员李维泽调侃道,“这次参加WBCD比赛也是大家各奔东西后第一次团聚。”
考虑到比赛规则是在规定时间内尽可能完成更多次数的子任务,“奶龙队”使用基于VR的remote遥操作和端到端模仿学习模型(Action Chunk Transformer,ACT)相结合的方式,将三个任务进一步分解成了“展开桌布-解锁餐盒扣并开盒子-pizza从盘子放进餐盒-对齐并关盖子”等子任务,然后挑选出“pizza从盘子放进餐盒”的任务采集了150组多样且随机放置的真机数据,训练ACT模仿学习模型。除此之外的子任务均采用将机械臂末端重定位到VR手柄进行remote遥操作。
“我们在现场的队员连续三天一直在调试设备,采集数据,训练policy,升级遥操作方案;在国内的队员也一直在帮忙写文档记录问题和远程部署服务器,都非常的累,但夺冠后这一刻所有劳累都烟消云散了。”李维泽告诉「甲子光年」。
奶龙队在颁奖现场,来源:WBCD提供
佐治亚理工学院前来参赛的是颇具名气的EgoMimic团队。不出意外地,该团队在赛事中使用了他们最新开源的EgoMimic技术——即通过第一视角视频进行大规模的模仿学习,解决具身数据获取成本高、标注难、多样性不足的瓶颈。
“人类演示提供了一组多样化的轨迹,这些轨迹密集地填充了组合的状态-动作空间,让我们的策略接可以适应各种各样的物体几何形状、材料属性和环境变化”,佐治亚理工的朱筠舟说,“在餐桌服务中,人类数据包括不同方向和折叠模式的展开布料——每种都有独特的策略和3D 轨迹,容器的位置和披萨的切片也是随机的。在训练期间我们给模型大量输入我们看到的不同视觉信息,让策略学会了适应环境,从而在操作过程中实时重新规划物体的位移。”
EgoMimic | Scaling Imitation Learning through Egocentric Video,图源:github
EgoMimic团队通过将大量机器人遥操作数据与大量以自我中心视角的人类示范数据,如人类在铺桌布时候的“举布-拉布-抓布”动作数据结合起来训练机器人,让机器人得以协调地用一只手固定容器、另一只手扣上容器盖子,也凭借此项技术获得了餐桌服务挑战赛的亚军。
获得了餐桌服务挑战赛季军的是上海科技大学的StarQuest团队,他们来自SEALAB顾家远课题组,专注于机器人操作的研究。
和很多团队一样,他们同样采取了遥操作的模式,利用一只手臂操作、另一只手臂上的传感器作为观察视角的方式完成了比赛。
除了真机竞赛,WBCD还提供了对应的仿真测试平台和基于云平台的在线Leaderboard。该平台基于由上海交通大学穆尧助理教授团队研发的RoboTwin框架进行开发,支持对WBCD竞赛任务的数字孪生和专家数据大规模自动生成。“WBCD-Sim是一个集数据生成,模型训练和策略评估一体化的仿真测试平台,该平台在地瓜机器人有限公司云平台服务的支持下,支持在线评测,用户只需要上传checkpoint和推理代码,即可在线完成评测。”上海交通大学的张钰浩对「甲子光年」表示。
Leaderboard云平台,图源:WBCD
4.技术洞察:灵巧手、VLA模型、数据与新型遥操作系统
看完整场比赛,有四个方面刷新了我们的认知。
第一是灵巧手。
随着机器人从传统的编程机械臂走向具身和人形,体现在外形上和使用场景中的最大变化,多了一双“灵巧手”。传统的工业夹爪往往功能单一,而灵巧手能模拟人手执行更复杂的操作,如抓握不同形状和材质的物体、工具使用等。灵巧手的出现和普及,极大推动了机器人在非结构化环境中的应用。
以苏黎世联邦理工学院的Orca Hand为代表,Orca Hand以其低成本(3D打印部件)、高度拟人化(17自由度)、耐用性(弹性关节、肌腱自动张紧)和AI友好(集成触觉、支持模仿学习/强化学习)等特性给人留下了深刻的印象,而Orca Hand的发布也代表了灵巧手技术正朝着更低成本、更高自由度、更强感知能力和更易于AI集成的方向发展。
Philippos告诉「甲子光年」,现在的二指夹爪已经可以夹取大部分物品,但是他们关注的是手的和合(box closing),相较于二指夹爪来说,拿出两根手指夹取东西显然更轻松,而且用手抓东西也更全能。Orca Hand的核心优势在于以极低的成本实现了接近人手的灵巧度和感知能力,这使得复杂操作的AI研究更容易普及。
灵巧手的未来趋势是能够让研究人员“自主”进行修复。
“比如,它们很容易打开、修复和放回去。理想情况下,研究人员就会想要不断地使用这只手,这样它就能长时间地操作。与此同时,我们也在针对指尖的触觉感应做研发。”他说。
我们在ICRA现场看到了很多做灵巧手的企业,其中不少是中国的企业。
第二是VLA模型。
VLA模型旨在让机器人能够理解自然语言指令,结合视觉信息进行场景理解,并自主规划和执行多步操作序列,在本次大赛中被频繁使用。
UC Berkeley博士生、WBCD的组织者之一Toru Lin告诉「甲子光年」:“VLA把机器人动作Action和视觉Vision、语言Language模态映射到同一token空间,用基于transformer大模型进行训练,目前被广泛认为是实现具身智能道路上非常有希望的发展方向。它正在重塑人机交互,甚至可能带来‘机器人领域的图灵测试’——你无法分辨操作者是人还是算法。”
本次WBCD,卡耐基梅隆大学、跨维智能、佐治亚理工的团队都运用了VLA模型。它们的差异化体现在如何处理更复杂的指令、如何进行有效的场景理解、以及如何生成鲁棒的多步动作序列。
其实,目前VLA模型最大的痛点在于泛化能力不足、对真实世界复杂动态变化的鲁棒性不够,需要大量的优质多模态数据进行训练。但真实数据质量高但获取成本大,互联网数据量大但噪声多,合成数据可控但可能存在Sim-to-Real Gap。
第三是数据。
数据正在成为具身智能的阿喀琉斯之踵。但在本次大赛中,我们看到了一些解决现有具身数据难题的新方法和新趋势。
比如佐治亚理工的EgoMimic团队通过Meta Project Aria智能眼镜,以非侵入方式被动采集人类日常任务中以自我为中心(Egocentric)视频数据,结合3D手部追踪技术,将数据收集成本降低90%以上。
跨维智能主要采用仿真合成数据训练模型——他们的数据主要通过自研的DexSim仿真平台程序化生成,数据集构建过程则遵循基于LLM的智能任务合成和半自动场景构建、多层域随机化、演示生成与大规模数据增强的自研自动化管线进行。
加州大学圣地亚哥分校副教授苏昊、北京大学前沿计算研究中心助理教授王鹤等学者曾多次在公开表示,使用仿真可以采集更多数据,这对于训练大模型至关重要。而苏黎世联邦理工团队的Davide Liconti也非常看好仿真数据,他认为仿真器是“一种非常可扩展的方式来增加数据源并为现实世界的迁移提供先验知识”。
奶龙团队则选择使用现场遥操作的方式在真实机器人上采集数据,包括多视角RGB序列和关节角度,并混入执行失败后的恢复数据以增加具身模型的鲁棒性。他们虽然没有使用仿真器和仿真数据,但也通过增加多样化的示范数据数量的方式来提升模型泛化能力。
第四,新型遥操作系统。
我们注意到,一些新型遥操作系统和执行器硬件也出现在了大赛中,比如洛桑联邦理工学院的线控遥操作系统和加州大学伯克利分校用脚踏板控制的、高低精度控制设备组合而成的系统就具有很鲜明的特色。
5.从“赛场”到“工厂”还有多远?
具身智能的火热,带火了一些机器人比赛,似乎这些比赛成为了检验机器人能力的“试金石”。但是,仔细去看一些比赛,会发现其娱乐性大于专业性,真正能推动商业转化的寥寥无几。
「甲子光年」认为,此次WBCD挑战赛不仅是技术的竞技场,更是对具身智能研究方向的精准引导和对产业落地的有力推动。
这次挑战赛之所以有价值,我们认为有这三方面原因:“真实场景驱动”“能力边界探索”和“鼓励自主智能”。
首先是真实场景驱动。WBCD挑战赛是真正从机器人公司及市场的实际需求出发,比的是参赛团队解决实际生产中最迫切痛点的能力,WBCD的“生物实验”“物流打包”和“餐桌整理”这三个方向抓得很准。
生物实验面临高昂的人工成本以及严重的效率问题;物流打包场景背后是物流电商行业持续扩张所带来的需求爆发;餐桌整理场景则深入到人们日常生活的方方面面。
这次挑战赛并不容易,我们在现场了解到,多支参赛队伍以及部分赞助商都曾对Robotics and AI Institute(RAI)研究员朱行昊(他参与设计了桌面整理任务)提出,是否可以将该任务简化,以降低硬件损耗、提升完成率。但WBCD组委会最终决定保留“原汁原味”的任务难度。
“现实市场的复杂程度比比赛残酷一万倍。”WBCD组委会成员、双臂机器人公司Dexmate的创始人&CEO陈涛解释,“你哪怕在比赛里得了100分,但到了客户那里,交付失败就是零分。我们希望让团队面对的,就是最接近真实落地的挑战。”
此外,本次赛事的设置也倾向于找到双臂机器人的“能力边界”,通过具有挑战性的任务,激发参赛团队探索创新的技术方案。
以打包场景为例,一个有意思的细节是,不单单要把这些东西放到盒子里,还要把盒盖两侧的折角塞到盒子里。这一步对于人类来说都比较困难,更不要说机器人了。
餐桌服务中的“保鲜盒任务”对机器人来说并不容易。这个看似寻常的日常物品,实则对机器人提出了严苛要求:两侧的卡扣结构配合内部橡胶密封圈,使得打开和合上盖子都需要极高的精准控制——既要够用力,又不能过猛,还要在不破坏结构的前提下完成稳定操作。
生命科学实验挑战赛则是最难的,其中的“螺纹对孔”和“透明试管”也极大考验着机器人的精细操作和物体辨认能力,其中试管均为透明,增大了机器人辨识难度。而且许多生物实验流程复杂,现有机器人末端执行器自由度又比较有限,难以模仿人手在操作生物样品时所展现出的高柔韧性和灵巧性。

生命科学比赛中机器人需要将几毫米直径的两个试管用螺纹旋转的方式精准连接 图源:WBCD
最后,我们感受到,这次WBCD在评分标准上明显向“自主智能”倾斜。
算法能力的评估采用加权打分机制,分为“自主算法”“非现场远程遥操作”“现场用挡板模拟遥操作”和“在场遥操作”四类,其中“自主算法”的权重最高(为16分),其余依次为8分、4分、1分。这一设计体现出评委对“去人化”和高度自动化方案的明确鼓励。
但评委关注的不仅是最终成果,更在意方案背后的实现路径——它是否高效?是否具备推广价值?“完成任务的方法可以多种多样,但在具体执行中,如何保障数据质量和系统稳定性,是必须面对的挑战。”生命科学实验挑战赛的机械臂供应方、松灵机器人北美负责人曾逸恒说。
比赛也在刻意拉近“科研”与“应用”之间的距离。
在评审过程中,主办方将参赛队伍视为面向真实市场的创业公司,评估其方案是否具备商业可行性与持续迭代能力。
“我们在制定评分标准时会让大家代入一个设想:如果你是这家创业公司,你会怎么解决客户的真实痛点?”许倬说,“比如遥操作方案,听起来好用,但你真的落地后,人力成本可能会吃掉全部优势。很多看似能跑通的技术,最后卡的就是这个现实问题。”
WBCD并没有做一场“炫技”的表演,而是要通过比赛来找到解决行业“真问题”的方法。
这也是我们这次ICRA之行最有收获的地方。

推荐阅读





×
右键可直接复制图片