
 阅读时间大约10分钟以上(5105字)
阅读时间大约10分钟以上(5105字)
2025-05-30 国外多所顶尖机构发布IEEE TRO人形机器人遥操作综述
来源:人形机器人发布
人形机器人远程操控技术正在为我们打开一扇通往更加广阔世界的大门。
作者:Aly 出品:人形机器人发布
在科幻电影中,我们常常看到人类通过控制机器人替身在危险环境中执行任务的场景。《阿凡达》中,主角通过神经连接控制基因工程创造的纳美人身体;《环太平洋》里,驾驶员通过"通感"控制巨型机甲。这些曾经只存在于科幻世界的构想,如今正在成为现实。
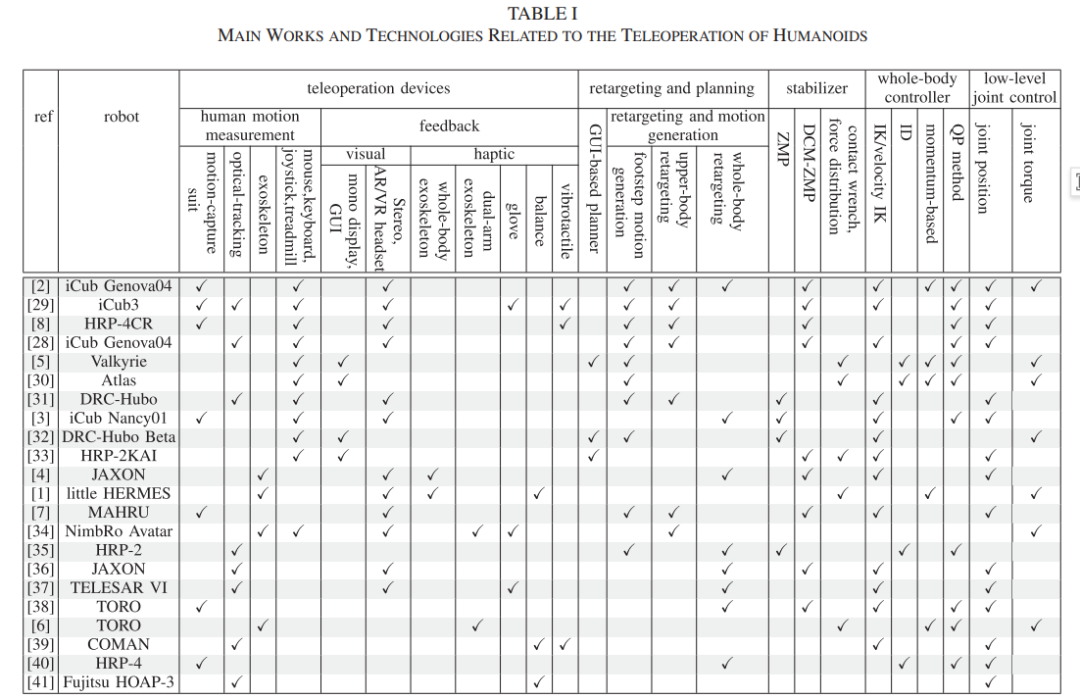
IEEE机器人汇刊最近发表的一篇关于人形机器人远程操控的综述,全面梳理了这一前沿领域的发展现状、关键挑战和应用前景。这篇由来自意大利技术研究所、伊利诺伊大学、日本国家先进工业科学技术研究所等机构专家联合撰写的论文,揭示了人形机器人远程操控技术如何将人类的认知能力与机器人的物理优势结合,创造出超越人类生理局限的可能性。

远程存在:当你的意识跨越空间限制
人形机器人远程操控(Teleoperation)是指通过各种接口设备,让人类操作者能够远程控制人形机器人,并通过机器人感知远程环境信息。这项技术也被称为"远程存在"(Telexistence)或"远程呈现"(Telepresence),允许人类"虚拟存在"于远程位置,通过机器人替身体验实时感觉。
与传统机器人相比,人形机器人的结构更适合在为人类设计的环境中工作。想象一下,在一个核电站事故现场,轮式或履带式机器人可能因为楼梯、门槛或狭窄通道而无法前进,而人形机器人却能像人类一样行走、攀爬,甚至操作为人类设计的各种工具和设备。它们的操作多样性使其特别适合需要复杂移动和操作技能的工作,如检查、维护和与人类互动。
在某些场景下,如远程护理,机器人的人形外观尤为重要。当病人面对一个有着人类外形、能够自然交流和表达情感的机器人时,会感到更加舒适和信任,这增加了社交接近性和意图可读性。正如论文中所说:"在特定情境下,如远程护理,人类外观因素很重要,因为它增加了可接受性、社交亲近感和意图的可理解性。"
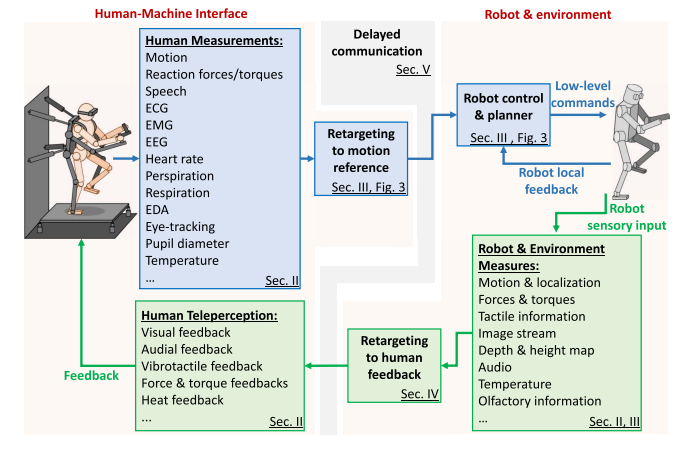
一个完整的人形机器人远程操控系统通常包括几个关键部分:人类传感测量、映射和重定向、反馈接口、通信通道和机器人本地控制。这种系统将人类认为理所当然的日常动作,转化为复杂的机器人控制问题,挑战远不止于技术层面,还涉及如何让普通用户能够轻松驾驭这一系统。
远程操控技术的发展已经有了一些里程碑式的进展。2011年福岛核事故后,DARPA机器人挑战赛推动了人机监督机器人技术的创新;在太空应用领域,宇航员已经能够从国际空间站遥控地球上的漫游车和移动操作机器人;2019年,人形机器人Skybot F-850甚至被送往国际空间站,尽管设计尚未完善。而最近,由参观日本Tachi实验室启发,XPRIZE基金会启动了ANA Avatar XPRIZE全球竞赛,旨在"将人类的感官、行动和存在实时部署到远程位置,引领一个更加互联的世界"。
感知与反馈:构建人机信息闭环
要实现有效的远程操控,需要解决两个关键问题:如何精确捕捉人类操作者的意图,以及如何向操作者提供丰富的环境反馈信息。
捕捉人类意图
对于简单的远程操控任务,键盘、鼠标或操纵杆等传统接口或许足够。但对于复杂的人形机器人,尤其是当用户希望对机器人施加高级别的控制权时,这些简单界面远远不够。于是,研究者开发了利用人类和人形机器人在几何结构上的相似性的解决方案,通过空间类比提供对机器人四肢的参考(自然映射)。
目前,测量人体运动的技术主要有三类:
基于惯性测量单元(IMU)的可穿戴技术能够高频率、高精度地捕捉人体运动,且不存在遮挡问题。它们可以是分散在身体各部位的独立IMU传感器,也可以是整合的传感器网络。
光学传感器,如深度传感器、光学动作捕捉系统或普通相机,可以在2D或3D空间中生成和跟踪人体骨架。这些系统的主要挑战是遮挡问题和设备便携性。
外骨骼设备在双边远程操控场景中尤为有用,不仅可以追踪用户运动,还能提供力反馈。
除了运动信息,一些先进系统还会测量人类的生理信号,如肌电图(EMG)、脑电图(EEG)、心率和眼动追踪等,以更全面地理解操作者的意图和身体状况。例如,肌电图传感器能够测量肌肉活动,可以在力量产生前几毫秒预测人类动作,有助于提前感知操作者意图,增强远程操控体验。
提供环境反馈
为了让操作者感受到远程环境并做出适当决策,系统需要提供丰富的反馈信息,主要包括视觉、触觉、平衡和听觉反馈。
视觉反馈是提供情境感知的传统方式,可通过图形用户界面或VR头显实现。在DARPA机器人挑战赛中,参赛团队广泛使用图形用户界面,显示来自机器人摄像头的RGB图像,以及深度、激光雷达等环境信息。VR头显提供更沉浸式的体验,但在机器人行走时可能导致晕动症,因为机器人摄像头的图像不稳定,而人眼自动稳定图像。
触觉反馈在涉及力量操作或与其他人类主体互动的场景中尤为重要。通过力反馈、触觉显示和振动触觉反馈,操作者可以感知接触、纹理和温度。日本研究者开发的TELESAR V系统集成了多种触觉反馈,基于"触觉原色"理论(力、振动和温度),通过组合这三种基本感觉可以重现任何皮肤感觉。
平衡反馈向操作者传递机器人平衡状态信息,而不是直接映射施加到机器人上的干扰力。这可以通过振动触觉带、缆绳驱动触觉接口或轻型机械臂实现。在一些先进系统中,如平衡反馈接口(BFI),由被动外骨骼和并联机构组成,可应用反馈力到操作者躯干。
听觉反馈则通过耳机或扬声器提供,用于与远程环境中的他人通信、增强情境感知、定位声源或检测碰撞。
这些反馈技术的组合,旨在创造一种"身临其境"的操控体验,让操作者能够精准控制机器人并感知远程环境。正如一位研究者所说:"真正的远程存在感只能通过动觉地将操作者与远程环境耦合起来,引入力反馈来实现。"
智能映射与控制:机器人如何理解并执行你的意图
将人类动作映射到机器人动作,看似简单,实则复杂。人形机器人与人类在体型、关节角度范围、力量等方面存在差异,需要复杂的算法进行"重定向"。
重定向可以定义为一个映射H:A → A,其中A是感知到的人类动作域(运动学和动力学轨迹),A是机器人动作空间。这个映射应当最小化人类意图和机器人动作之间的差异,同时满足远程操控场景中的约束条件。
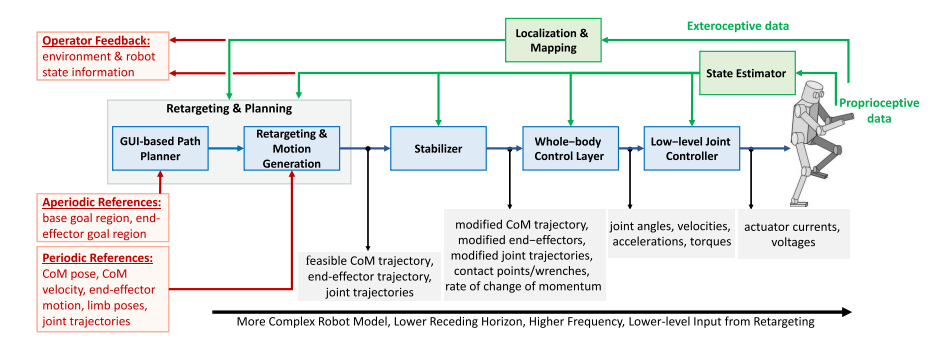
根据输入类型,重定向方法可分为基于GUI的路径规划、下肢足步运动生成、上肢重定向和全身重定向等。例如,在上肢重定向中,可以将人类手腕的运动映射到机器人末端执行器,通常旋转运动进行恒等映射,而平移运动则使用固定增益(由于几何差异)。
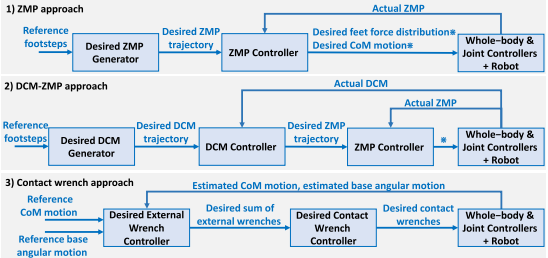
人形机器人在执行重定向动作时,最大的挑战是保持平衡。稳定器通过零力矩点方法、发散运动分量-ZMP方法或接触力矩方法,动态调整输入参考以增强机器人质心动态的稳定性和平衡性。
全身控制层接收经稳定器修正的人类参考,输出机器人关节角度、速度、加速度和/或关节力矩。主要方法包括全身逆瞬时速度运动学控制、全身逆运动学控制、全身逆动力学控制和基于动量的控制。这些控制方法的组合,使机器人能够同时保持平衡并精确执行复杂任务。
然而,实际应用中还面临许多挑战。正如研究者指出:"将人形机器人远程操控的重定向和规划问题分开似乎很有用,但在实验室外(真实世界)和非结构化环境中执行敏捷远程操控任务时效果不佳。"许多现有技术使用简化的人形机器人模型,虽然计算效率高,但受到简化假设的限制,如固定机器人质心高度、忽略人类或机器人旋转运动等。
未来方向可能包括使用模型预测控制(MPC)同时解决全身协调重定向和规划问题,或采用数据驱动方法。一种有前景的方法是"循环一致性原理",即重定向到替身的运动在重定向回来时应生成人类的原始运动。
辅助远程操控:人机智能协同
将机器人的完全控制权交给人类操作者,往往会限制远程操控的效率,导致笨拙的动作、失败或需要多次尝试才能完成任务。特别是对于人形机器人,操作者需要同时控制多个方面(如双手位姿、足部位置、平衡),没有显著的机器人自主性辅助很容易失败。
辅助远程操控通过引入机器人自主性来协助用户完成任务,使远程操控更容易、更无缝。主要方法包括共享控制、监督和保障远程操控、双边远程操控和阻抗控制。
当机器人具备较高自主性时,操作者可以作为监督者,监控机器人并在意外情况下及时干预。这种方法在DARPA机器人挑战赛中很常见,操作团队能够在需要时引导机器人完成复杂任务。
双边远程操控技术使机器人接收人类的运动参考,同时操作者也接收机器人的力反馈。这种反馈告知操作者机器人复现命令运动的表现或施加在机器人上的外部干扰。全身双边远程操控进一步扩展了这一概念,在全身层面上动态耦合人类和机器人,同时提供关于机器人全身动态的反馈。
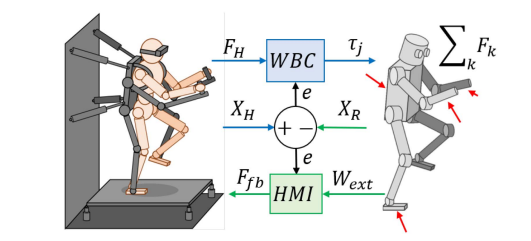
在这些策略中,提供给操作者的动觉反馈通常与人机在任务和/或平衡调节方面的运动学或动力学差异成正比。一些策略将平衡权威转移给机器人的自主控制器,保证机器人运动的稳定性;其他方法则依赖人类操作者主动调节机器人的平衡,让操作者学会如何应对机器人的动态特性。
研究表明,辅助远程操控在增强用户体验和系统性能方面有巨大潜力。正如一位研究者所说:"我们的目标是最终允许操作者学习如何应对机器人的动态特性,并即时创建新的动作。"
通信与评估:现实世界的挑战
在远程操控中,通信通道会引入复杂性,影响系统的稳定性和性能,特别是传输延迟和信息失真。
早期研究发现,当插入延迟时,大多数操作者采用"移动-等待"策略,这极大地影响了操作速度。即使100毫秒左右的往返延迟也可能导致远程操控系统不稳定,无论是由于人类操作者对延迟感知错误的过度补偿,还是在双边系统中控制律的直接影响。
分组交换网络还引入了随机变化的延迟、离散时间信息交换、量化效应和数据包丢失等问题。针对这些挑战,研究者提出了被动性控制等高级技术,使用波变量或能量罐作为能量观察器,确保系统稳定性。
对于人形机器人的平衡和速度,延迟尤为重要。研究表明,如果系统的时间延迟高于临界值,机器人会变得不稳定。临界时间延迟与机器人质心高度有关,质心高度越低,临界时间延迟越低,这与线性倒立摆模型更快的动态特性有关。
随着机器学习技术的兴起,一种有前途的方法是使用预测技术,一方面预测人类运动并映射到机器人,另一方面预测机器人运动和与环境的交互力,以及视觉反馈流,发送给人类操作者。
为了部署满足用户需求的远程操控系统,需要在设计和开发阶段评估系统性能。评估指标包括可用性评估、情境感知、工作负荷和参与度等。这些指标不仅确定系统的固有问题和限制,还为设计和开发提供指导。
接口设计和自主性水平是影响系统成功和用户体验的关键参数。高度自动化降低情境感知,而复杂任务中的低自主性加剧工作负荷。人为中心自主性(用户在控制回路中的中间自主性水平)增强情境感知,减少工作负荷,提高应对故障的性能。
最近,ANA Avatar XPRIZE通过评估远程操控系统在运动、操作和社交互动场景中的任务性能和主观测量,引领了人形机器人远程操控系统的评估。这些评估帮助开发者选择合适的远程操控设备,并根据架构调整自主性水平。
未来已来:从灾难响应到太空探索
人形机器人远程操控的应用前景广阔,涵盖从危险环境作业到太空探索等多个领域。
在远程存在与远程呈现方面,COVID-19疫情突显了这一技术的潜力。传统视频会议只能让人们看到和听到彼此,而人形机器人远程操控允许人们传达社交线索并进行物理互动,创造更丰富的远程体验。
危险环境中的远程操控是该技术最迫切的应用之一。在切尔诺贝利和福岛核电站危机中,机器人被用于执行监视、搜索救援和操作任务。人形机器人的双足运动在机动性、敏捷性和运动范围方面的优势,使其特别适合这类场景。在福岛核事故中,由于辐射水平人类无法进入,花了三个多月才交付能执行第一个任务的机器人。
在制造和研究环境中,尽管人形机器人成本高昂,但它们在为人类设计的环境中具有操作优势。例如,TORO和HRP-4机器人已在飞机制造环境中进行装配操作。
远程护理在疾病爆发期间尤为重要。前线医护人员面临感染风险,而远程操控机器人可以执行各种任务,如操作物体、进行测量和与患者互动,同时减少感染风险。
太空应用包括卫星在轨服务、国际空间站维护和行星际探索等。由于成本、安全和复杂性因素,某些任务不适合人类执行,而自主机器人的可靠性尚不足以胜任,远程操控机器人成为理想选择。例如,Lii等人提出了一个监督自主框架,使国际空间站上的宇航员能够远程操控地球上的SUPVIS Justin机器人,模拟行星际太阳能电池板服务和维护任务。

服务领域也有广阔的应用空间,如家庭护理、超市补货、远程教育和酒店引导等。这些应用在操作者不能亲临现场时尤为重要,关键要求是机器人与人交互的安全性以及操作和修改远程环境的能力。
结语:从科幻走向现实的挑战与机遇
人形机器人远程操控技术正从科幻走向现实,但仍面临诸多挑战。从动态和控制到通信和人类心理生理学,这一领域需要多学科协作才能取得突破。
人形机器人本身的复杂性——高度冗余的非线性、混合和欠驱动模型——使得在保持平衡的同时执行精细操作变得极其困难。如何平衡机器人自主性与人类控制权,如何克服通信延迟带来的不稳定性,如何设计直观易用的界面,都是亟待解决的问题。
但随着技术的进步,我们有望看到更多远程操控人形机器人应用于各种场景,从灾难响应到太空探索,从医疗护理到服务业,为人类社会带来便利和新的可能性。
正如ANA Avatar XPRIZE的目标所述,人形机器人远程操控技术正在逐步实现"将人类的感官、行动和存在实时部署到远程位置,引领一个更加互联的世界"的愿景。通过打破物理限制,让人类能够在危险环境中工作而不冒风险,在太空中探索而无需亲临其境,在疫情期间提供医疗服务而不担心感染,这项技术将重新定义人类与物理世界互动的方式。

当科幻小说中的场景一步步成为现实,我们不禁想象:未来,每个人是否都能拥有一个远程"分身",让我们的能力不再受到物理身体的限制?无论是在火星表面收集样本,还是在深海探索未知生物,或是跨越千里为亲人提供实质性的陪伴和照料,人形机器人远程操控技术正在为我们打开一扇通往更加广阔世界的大门。
这不仅是机器人技术的一次飞跃,也是人机协作的一次革命性尝试,将彻底改变我们与世界互动的方式,创造一个人类能力得到无限扩展的未来。

推荐阅读





×
右键可直接复制图片