
 阅读时间大约6分钟(2061字)
阅读时间大约6分钟(2061字)
2025-07-21 噱头还是突破?Digit、优必选们的工业实验,距离产业还有多少“最后一公里”?
来源:优必选
具身技术突破与产业的真实需求之间,到底还有多少最后“一公里”的落差?
作者:余柯 出品:机器人产业应用
近日,优必选工业人形机器人Walker S2实现热拔插自主换电系统,让其具备了7*24小时不间断工作能力。然而,这种不间断作业是降低人工依赖,还是人力成本的转移?机器人纷纷在汽车工厂“秀肌肉”的同时,不禁让人深思,具身技术突破与产业的真实需求之间,到底还有多少最后“一公里”的落差?
核心要点
• 国内外企业在工业场景的实践
• 攻克工业长期任务需要多方面支撑
• 具身大模型落地仍面临诸多挑战
01
前言
本文从汽车制造业切入,盘点智平方、优必选、智平方、波士顿动力等国内外知名企业案例,看具身大模型如何从实验室走向工业场景,进而验证具身大模型能否真正在工业长周期任务中大施拳脚,开启智能制造的新篇章?
02
实践:
国内外知名企业案例对比
1.1
智平方:
汽车制造全场景验证的先行者
2025年6月7日,智平方与东风柳州汽车有限公司签署战略合作协议,标志着国产具身大模型在汽车制造全场景中首次深度应用。
智平方的GOVLA大模型驱动的机器人AlphaBot2(爱宝)入驻东风柳汽工厂,在12个关键制造环节执行智能化作业。爱宝机器人达成汽车制造“全场景验证”,展现出在复杂工业环境中的可靠性、灵活性,具备工业级部署潜力。其在上下料任务中实现“搬箱-姿态调整-定位放置”,提升效率和灵活性;拖拽料车时,实时分析产线状态并自主规划路径;在车门质检与贴保护布等环节,协调视觉、决策与动作系统执行任务。
相比传统工业机器人,GOVLA大模型使爱宝机器人更灵活、适应性更强,能应对多车型混线生产需求,缩短部署时间,确保任务稳定操作。东风柳汽开放“全场景”助力技术进化,爱宝机器人产生的数据反向驱动模型优化,形成闭环模式。

| 智平方爱宝机器人
1.2
优必选:
群体智能与汽车工厂的深度融合
优必选作为国内人形机器人领域的代表企业,其工业人形机器人WalkerS系列在智能制造场景中取得了显著进展。
WalkerS1工业人形机器人已在极氪5G智慧工厂开展协同实训,实现了多机协同作业。在大负载大尺寸料箱搬运任务中,多台WalkerS1机器人通过群体智能技术,能够根据料箱的位置和形状,自主规划搬运路径,协同完成搬运任务。在精准操作类质检任务中,WalkerS1机器人利用其高精度的视觉系统和灵活的操作臂,对汽车零部件进行精确检测,确保产品质量。
优必选将“群体智能”技术引入人形机器人,解决了工业场景产线级任务对多机协同作业水平的全新考验。WalkerSLite作为国内首个在汽车工厂全流程执行搬运任务的人形机器人,能够在复杂的工厂环境中自主导航,避开障碍物,完成物料搬运任务。
| Walker S1 工业人形机器人
1.3
波士顿动力:
从巡检到制造的多元探索
波士顿动力以其独特的机器人产品线在全球具身智能领域占据重要地位。
Spot(机器狗):Spot与IBM合作,将AI和Maximo解决方案集成到Spot中,能够通过机载摄像头和传感器实时解释“看到”的内容,进行边缘分析。在工业巡检场景中,Spot可以进入人类难以到达的危险或复杂环境,如狭窄的空间、高处等,对设备进行检查,提高设备检查的频率和准确性,并自动生成工作单,从而延长设备正常运行时间,保障员工安全和效率。
Atlas(人形机器人):波士顿动力正与丰田研究所(TRI)合作,将TRI的大型行为模型(LBM)应用于Atlas人形机器人,以加速通用人形机器人的开发。Atlas的电动版本已推出,并计划出售给制造业。在制造领域,Atlas人形机器人能够通过先进的AI技术,实现更自然的人机互动和复杂的灵巧操控,如在装配线上进行零部件的装配、调试等工作。
1.4
其他代表企业
Agility Robotics(Digit)
Digit人形机器人在物流领域的应用不断拓展。除在GXO和亚马逊的仓库中进行物品搬运和放置外,还在其他物流场景中展现出色的动态调整和操作能力。例如,在货物分拣环节,Digit机器人能够根据货物的形状、大小和重量,灵活调整抓取方式,快速准确地将货物分拣到指定位置。
华为与阿里巴巴
作为互联网巨头,华为的盘古大模型深入电力、煤矿、医疗、铁路、制造等多个行业,支撑400多个业务场景的AI应用落地。在工业质检场景中,盘古大模型能够对生产线上的产品进行实时检测,快速识别缺陷和异常,提高产品质量。阿里巴巴的千问大模型也在实验接入工业机器人,探索其在智能制造、物流仓储等领域的应用潜力。
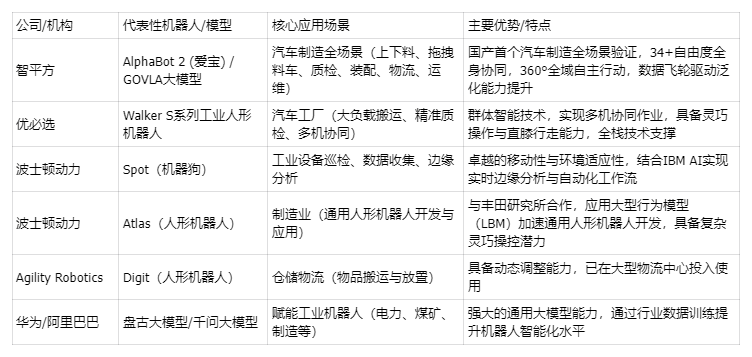
| 具身大模型工业代表性企业对比
03
挑战:
工业场景长周期任务的难点
1、完整策略体系建构
一方面,持续优化数据飞轮机制。需要在真实工业环境中,机器人能收集大量数据。另一方面,加大Sim-to-Real技术投入。改进模拟环境的物理仿真精度、传感器噪声模拟等,减小模拟与现实差距,才能提高模型在真实场景的表现。
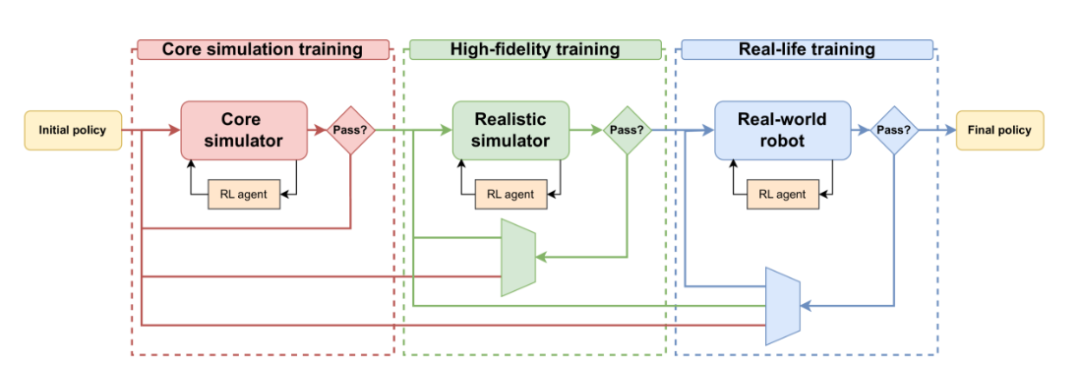
| Sim-to-Real适应性训练流程示意图
2、强化多模态融合与世界模型构建
提升模型对多种信息的整合能力,使其更精准地感知环境,并构建更精确的世界模型辅助决策。
3、重点突破“误差传播”问题
开发鲁棒、精确的世界模型,提前规避错误,并引入实时反馈等机制,确保任务的高成功率和稳定性。
4、构建完善的协作与反馈机制
确保机器人能与人类或其他机器人高效协同,提高任务效率和适应能力,推动生产流程的智能化。
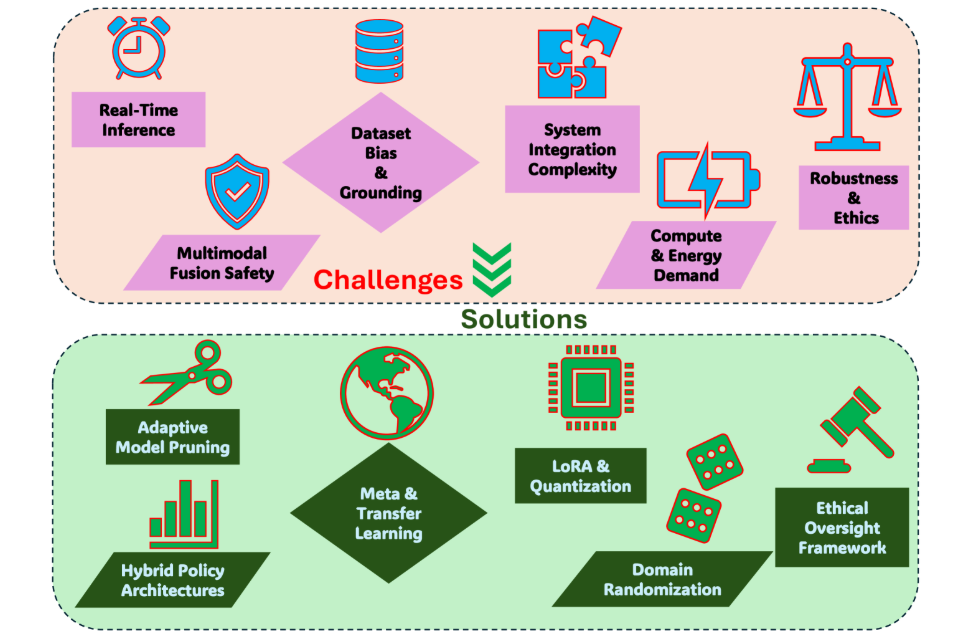
| VLA模型泛化能力提升路径示意
04
结语
具身大模型在汽车制造等领域的探索,已然展现出攻克长周期任务的惊人潜力——智平方的全场景验证、优必选的群体智能实践,无不印证着其通过泛化能力与自主决策,重塑工业生产逻辑的可能。
然而,从实验室的技术突破到产业端的规模化落地,仍横亘着难以回避的现实挑战:长周期任务中的误差累积能否被精准消解?复杂环境下的鲁棒性是否经得起24小时不间断作业的考验?数据飞轮的转动效率、“大小脑”协同的成本控制,以及与传统工业体系的兼容适配,每一项都是绕不开的“最后一公里”。
唯有正视鸿沟、持续破壁,才能让具身智能真正从实验室的理想蓝图,走进工厂车间的现实生产链!

推荐阅读





×
右键可直接复制图片