 阅读时间大约3分钟(1063字)
阅读时间大约3分钟(1063字)
2025-07-22 为什么高端机器人选空心杯电机?和传统电机的根本区别
来源:豆包
空心杯电机由于高能效、小尺寸、高响应、低噪声等特点,在多种领域快速发展。
出品:机器人新材料
在人形机器人、医疗器械与精密工业日益高端化的背景下,电机小型化、高性能化趋势明显。空心杯电机(Coreless DC Motor)作为代表微特电机发展方向的重要品类,近年来受到广泛关注。与传统电机相比,在结构、制造工艺、运行特性等方面均展现出明显差异。

图源:直流有刷空心杯电机结构图 科固技术

图源: 传统直流有刷电机结构图 科固技术
结构本质差异
无铁芯 vs 有铁芯
空心杯电机在结构上突破传统铁芯转子模式,采用无铁芯的“空心杯型”转子。这种转子一般由马鞍形绕组和精密支撑结构组成,省去了传统电机中用于固定线圈的铁芯骨架,在物理上消除了因铁芯产生的涡流损耗。
相较之下,普通有刷直流电机的转子依托于铁芯作为线圈支撑,具有较高的转动惯量和铁损,响应速度、能耗表现均逊色于空心杯电机。
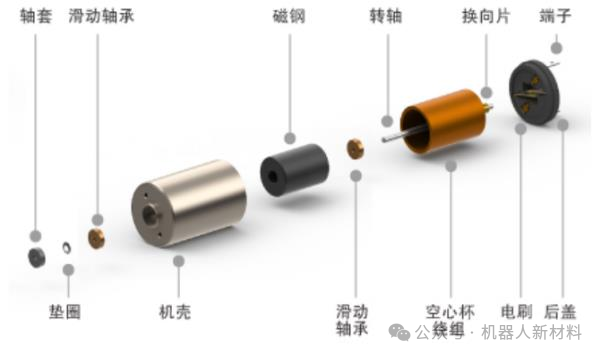
图源:有刷空心杯电机结构图 鸣志电器
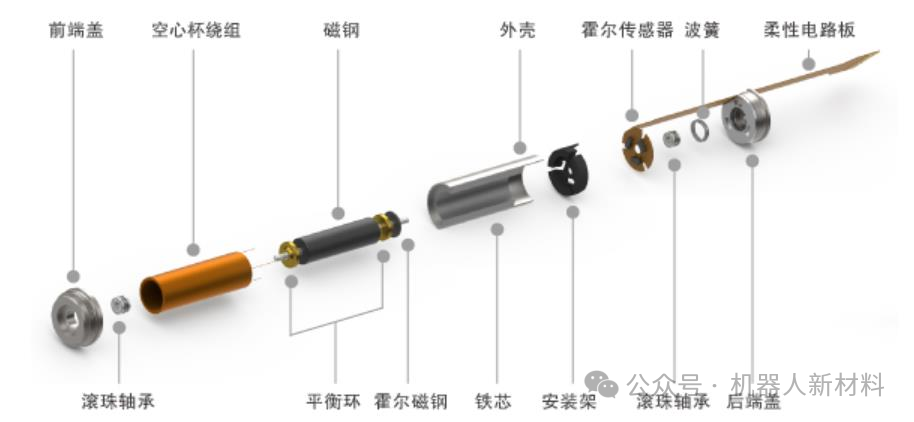
图源:鸣志电器 无刷空心杯结构图
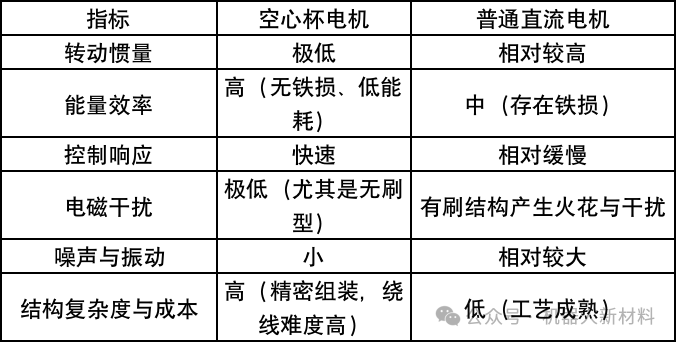
性能表现对比
制造流程与绕线技术的区别
普通直流电机流程:
普通电机的线圈直接绕制于铁芯上,整体生产流程相对标准化、自动化程度高,适合规模化生产。
空心杯电机流程:
空心杯电机因绕组无铁芯支撑,制造流程更加复杂,关键环节:线圈绕制 → 杯状成型 → 轴芯组装 → 焊接连接板 → 安装外壳与磁体 → 成品测试
线圈的稳定性直接决定电机性能,因此对绕线方式与绕制精度要求极高,尤其在尺寸微小或线径极细(抽头间距小于7mm)时更具挑战。
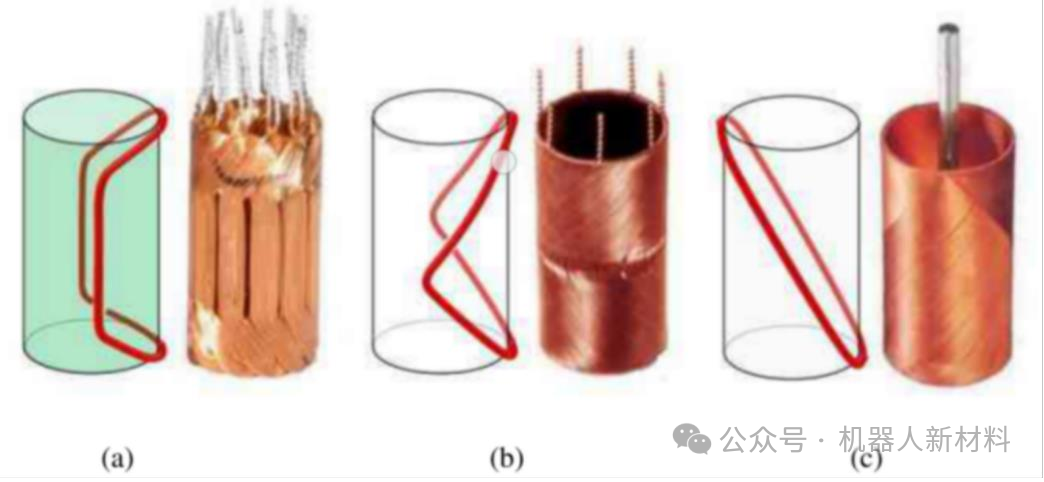
空心杯三种绕线方式
绕线方式决定性能上限
目前主流空心杯绕线方式包括三种:
直绕式:工艺简单,适用于匝数少的电机
斜绕式:技术成熟,但两端线圈重叠率高
马鞍形绕组:几何结构规整、损耗低,是目前国际先进电机制造的主流选择
马鞍形线圈优势:
缩小磁路气隙,提高磁通密度
降低线圈电阻,提升能效
支持更大尺寸电机应用,特别适用于高功率密度场景如机器人关节等
但目前国内多依赖卷绕+人工成型的方式,自动化程度低,成为制约产业发展的瓶颈之一。
空心杯电机的三大制造难点
线圈自支撑成型技术难:
国内尚缺高效自动化设备,劳动强度大、废品率高
测试与标准化:
个性化定制多,标准测试流程建立困难,耗时且成本高
杯型转子成型难:
精度、应力、粘合一致性要求高,直接影响整机一致性与寿命
应用场景与发展趋势
空心杯电机由于高能效、小尺寸、高响应、低噪声等特点,在多种领域快速发展:
医疗器械如微创手术器械、胰岛素泵
人形机器人关节驱动
高端无人机和精密光电系统
航空航天与军事电子
空心杯电机也可搭配不同速比减速器与编码器,作为力矩电机或精密位置反馈装置使用,高集成化与低惯量特性进一步增强了系统控制精度与响应速度。
空心杯电机并非普适性替代方案,而是针对高性能、微型化场景下的专业选择。技术门槛主要体现在绕线自动化与结构集成度上。随着国内设备制造商在马鞍形绕组自动化生产设备上不断突破,未来空心杯电机在精密机器人与高性能微驱动系统中的渗透率有望快速提升。

推荐阅读




×
右键可直接复制图片