 阅读时间大约10分钟以上(6589字)
阅读时间大约10分钟以上(6589字)
2025-08-19 2025 WRC:17家具身机器人企业灵巧手产品详情信息梳理
来源:戴盟机器人
灵巧手的技术演进不仅直接推动人形机器人智能化进程,更成为产业落地的核心瓶颈。
作者:陈康成 出品:机器觉醒时代
从2025 年世界机器人大会(WRC)可以看到,具身智能机器人领域已实现显著的技术突破。除备受关注的机器人本体展示外,灵巧手成为核心零部件领域最受瞩目的焦点 —— 其技术演进不仅直接推动人形机器人智能化进程,更成为产业落地的核心瓶颈。
从大会上各家企业展示的产品来看,灵巧手实现了三大方面的突破:
1)仿生结构革新驱动轻量化与高负载,例如,赛博格机器人Cyborg-H01 灵巧手采用类人肌腱传动设计,仅重 500 克却可稳定抓取 10kg 重物,整体夹持力 达40N;其通过含超高分子量聚乙烯成分的航空级复合纤维绳与自适应关节结构,实现了抗冲击性能提升与 40% 的成本降低。
2)触觉感知成为灵巧手智能化的核心,例如,帕西尼第三代多维触觉传感器PX-6AX-GEN3 依托 6D 霍尔阵列式核心技术与自研 AMSS 全模量测量系统,以 199 元起的价格实现极致性价比 —— 其不仅能完成 0.01N 微力检测与每秒百万次采样,更可为 GMH18 灵巧手赋予整手 1140 个 ITPU 多维触觉传感单元,全面覆盖指尖、指腹等关键接触区域,形成类皮肤级多模态感知能力,推动灵巧手在物流分拣、精密装配等场景实现抓取策略从预编程向实时动态决策的跨越。
3)混合传动方案解决历史矛盾:传统腱绳传动的精度磨损难题被“丝杠+腱绳”复合方案破解。据悉,特斯拉Optimus第四代亦传闻转向此路线,在提升自由度同时优化力控效率,标志技术路线从分化走向收敛。
灵心巧手CTO周永在最近的演讲中曾谈到,机器人普及的爆发点在于解决通用操作和泛化操作问题。这需百万台人形机器人积累真实场景数据,然而,实现这一目标需依赖三大支点:跨本体控制模型、数据闭环生态以及成本下探与国产替代。
尽管前景明朗,灵巧手仍面临长期可靠性与维护成本、算法泛化瓶颈以及标准化与兼容性缺失等方面的严峻考验。
总之,灵巧手已跨越“实验室参数竞赛”阶段,步入“成本-性能-场景”平衡的产业化深水区。当技术突破与规模化需求共振,其能否成为继AI大模型后下一个现象级焦点,取决于行业能否在仿生设计、数据飞轮与跨硬件协同中,找到打通“最后一厘米”的密钥。
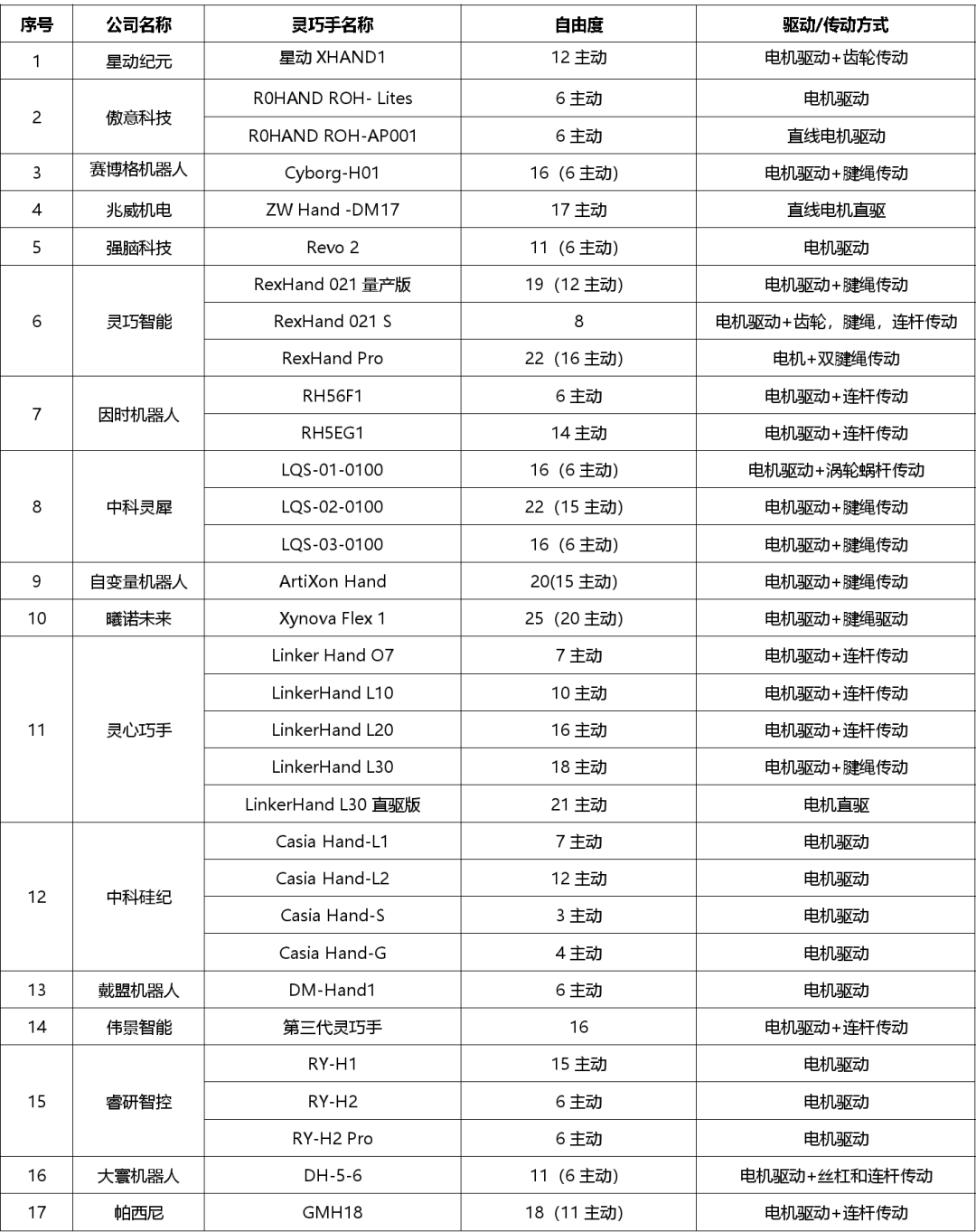
2025WRC:17家企业灵巧手信息梳理
1.星动纪元
星动纪元成立于 2023 年 8 月,总部位于北京,是由清华大学交叉信息研究院孵化的企业,也是唯一一家清华大学持股的人形机器人公司。公司创始人陈建宇为清华大学博士生导师、助理教授,核心产品涵盖人形机器人(星动 Q5、星动 L7)及核心零部件灵巧手星动 XHAND1。
在 2025世界机器人大会(WRC)现场,除星动Q5以及星动L7机器人本体之外,星动纪元还携五指灵巧手星动 XHAND1 亮相。这款产品在自由度分布、驱动方式、触觉感知及最大抓握力等维度的设计独具特色,展现出鲜明的产品特性。
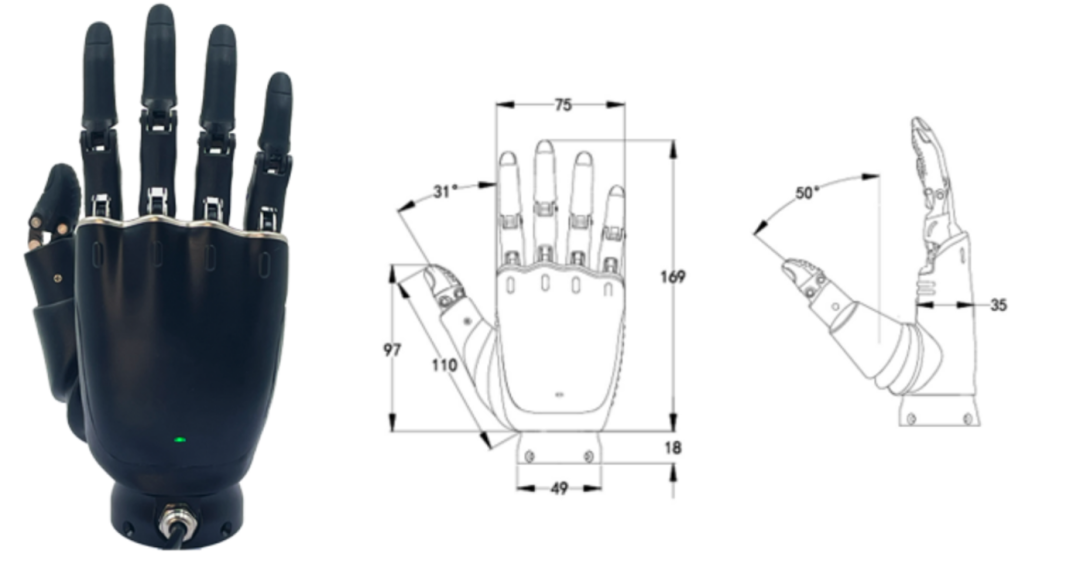
自由度分布:共12个主动自由度(DoF),其中,拇指和食指各有3个DoF,其他三指各有2个DoF。拇指可以实现110°范围内的活动能力,食指可以实现±15°的侧摆。
驱动方式:相比欠驱动方案,星动XHAND1采用纯齿轮准直驱传动。主动关节均在本位且全部解耦,给模仿学习、强化学习等AI算法的开发提供了较强的便利性。同时每个关节均可以反驱,可免于被掰坏或者受到意外冲击损坏的风险,抗冲击能力更强;
触觉感知:每个手指上布置1个高分辨率(>100点)触觉阵列传感器。每个指尖上可采集120-300个均匀分布的三维力信息,最小分辨率为0.05N。除了基于传统的压力触觉感知物体的硬度之外,它还可以感知接触觉和滑动感知,并通过面阵力的解算可以得到接触面表面纹理等更多信息。另外,每个触觉传感器上有20个分布的温度阵列,可以感知到接触物体的温度。
强大抓握力:得益于全自研一体化关节模组,以及底层电机的磁路拓扑与结构设计,星动XHAND1单指最大负载可以到5Kg以上,四指最大负载在20Kg以上,整手可以举起25Kg以上的哑铃。

星动XHAND1自由度和触觉传感器分布示意图(图片来源:星动纪元)
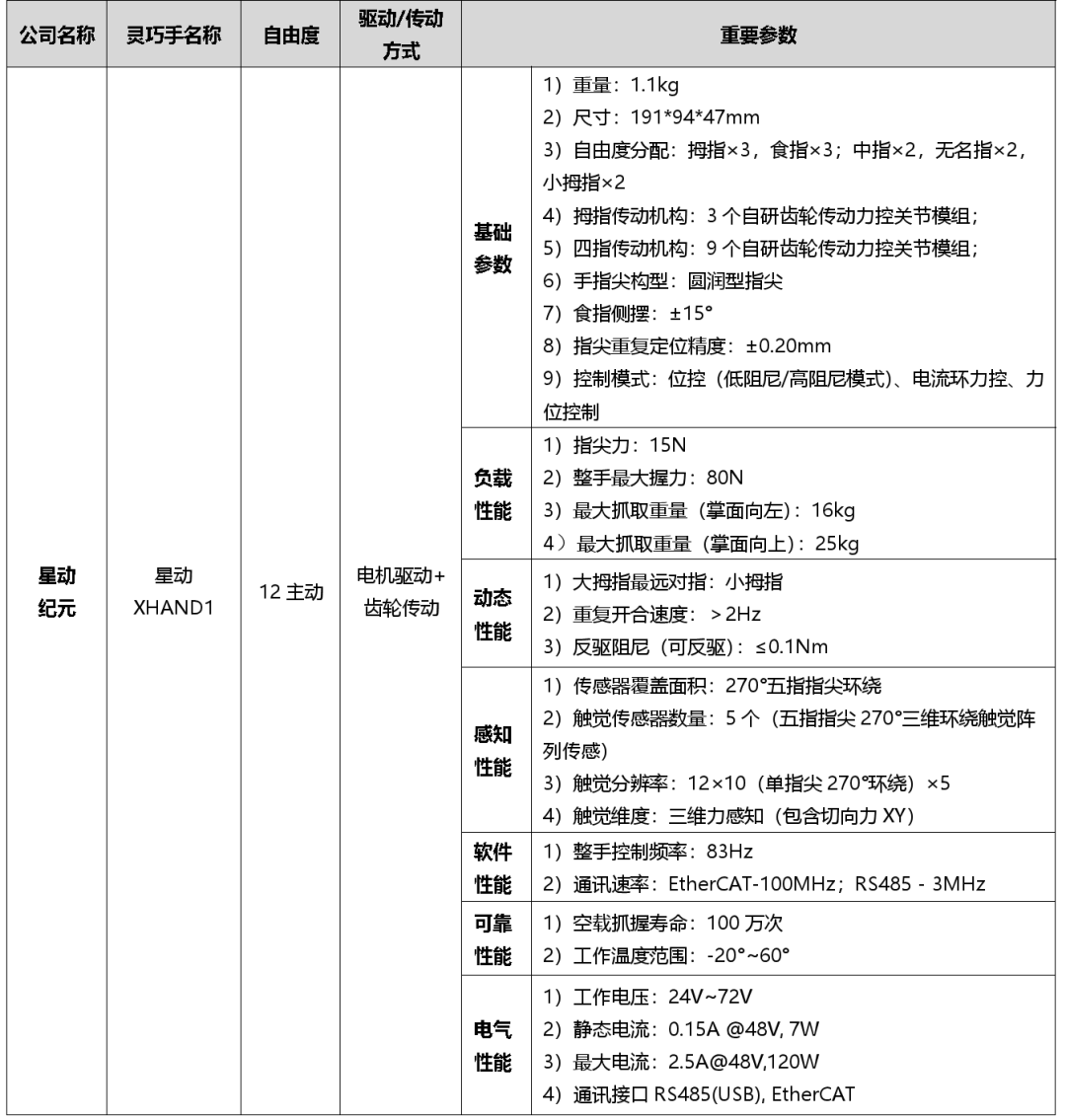
灵巧手星动XHAND1基本参数信息
2.傲意科技
傲意科技于2015 年在上海张江高科技园区成立,致力于神经信号传感器、神经信号 AI 识别及人机神经接口等前沿技术的研发。公司核心业务与产品涵盖智能仿生义肢、机器人灵巧手、gForce 肌电臂环、智能脑电图机及可穿戴外骨骼设备等多个领域。
在技术落地路径上,傲意科技在脑科学、神经科学与人工智能领域的创新成果,最初优先应用于医疗康复场景,如今正逐步拓展至具身智能领域,实现了技术应用场景的持续延伸。
傲意科技构建的“全场景灵巧产品矩阵”包含智能仿生手 OHand™系列与机器人灵巧手 ROHand 系列两大产品线。
在2025 WRC上, 傲意科技不仅带来了 5 月新发布的新一代触觉灵巧手 ROH-AP001,还展示了专为小型机器人量身打造的 ROH-LiteS 灵巧手。

ROH-AP001 灵巧手外观(图片来源:傲意科技)

ROH-AP001 灵巧手基本构成(图片来源:傲意科技)
ROH-LiteS 灵巧手(图片来源:傲意科技)
应用场景:
ROH-AP001 ——适用于工业机器人、人形机器人及特种设备等多种场景。
ROH-LiteS —— 专为小型机器人量身打造,能让小型机器人行动更灵活,可应用于服务机器人,执行送餐、导览等任务。
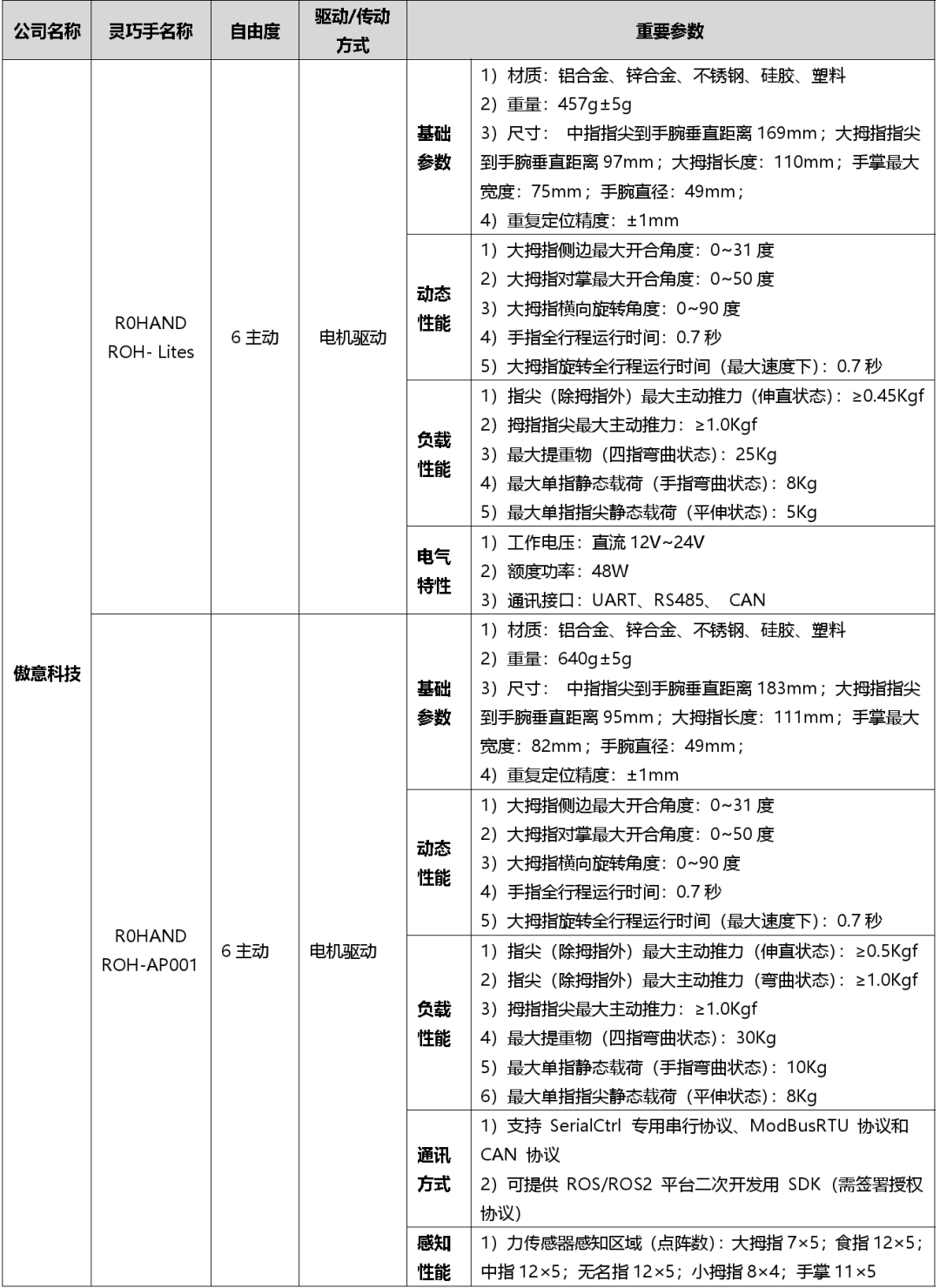
ROHAND ROH-Lites和ROH-AP001基本参数信息
3.赛博格机器人
深圳赛博格机器人有限公司于2024 年7月成立,总部坐落于深圳市南山区。目前,公司主营产品有全尺寸仿生人形机器人、轮式人形机器人以及灵巧手。
2025 年 7 月,赛博格机器人发布全尺寸仿生人形机器人Cyborg - R01。它拥有62自由度,搭载 16 自由度灵巧手,峰值扭矩达 411N.m,双臂负载能力高达 20kg,可适应复杂地形与环境,专为高危高负荷场景打造。
在灵巧手方面,在2025 WRC上,赛博格机器人展示了高精度灵巧手Cyborg-H01。该灵巧手采用5指节16自由度方案,同时还搭载了多模态融合感知技术,可精准感知物体接触状态、环境变化及自身形位状态,可实现对形状不规则物体的自适应抓取。
在应用方面,可以适应以下具体场景:
新能源整车线束布置、电网电线整理,主要任务为线束抓取、归位和插接。
新能源汽车钣金装配线、冲压车间自动化工业转接站,主要任务为异形件分拣+ 大重量搬运(替代叉车 + 人工)。
电厂以及巡检,主要任务为开关电柜、拉闸和旋转按钮、放电处理以及按压按钮(绝缘操作)。
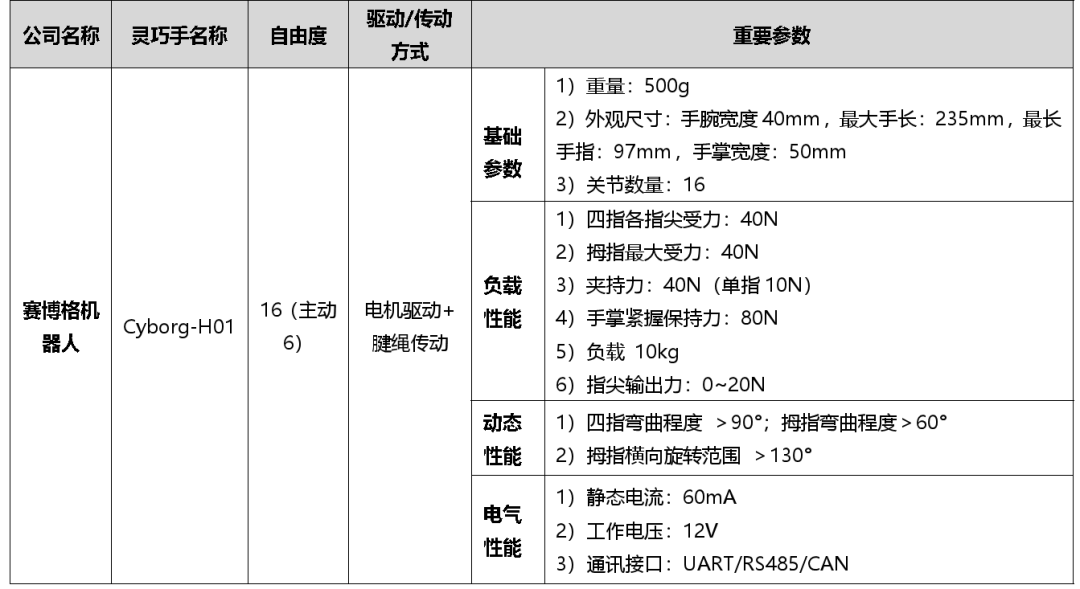
灵巧手Cyborg-H01基本参数信息
4.兆威灵巧手
深圳市兆威灵巧手技术有限公司成立于2025年3月,是深圳市兆威机电股份有限公司的全资子公司。该公司的主营产品为ZW Hand灵巧手系列。
2024 年 11 月,在第 26 届中国国际高新技术成果交易会上,兆威机电举办了灵巧手专场发布会,并正式推出最新研发成果 ——ZW Hand 灵巧手。
而在2025 WRC上,兆威灵巧手重点展示了ZW-Hand 系列的中的ZW HAND-DM17 系列灵巧手。
该产品具有以下特点:
1)自由度与驱动:采用17 个自由度设计(后续可扩展至 20 个),通过单指三关节独立驱动技术 实现精准运动控制。每个指节配备微型电机、行星减速箱和传感器,动作精度误差低于 0.3°,可模拟人手 95% 以上的精细动作,如穿针引线、捏取薯片等。
2)集成化设计:整手重量仅900 克,却集成了17个微型电机、力传感器、控制模块和柔性电子皮肤,实现了“驱动 - 感知 - 控制”一体化。
3)感知与交互能力:指尖、手心覆盖柔性电子皮肤,可实时感知压力、温度、湿度等环境信息,精度达0.01N。
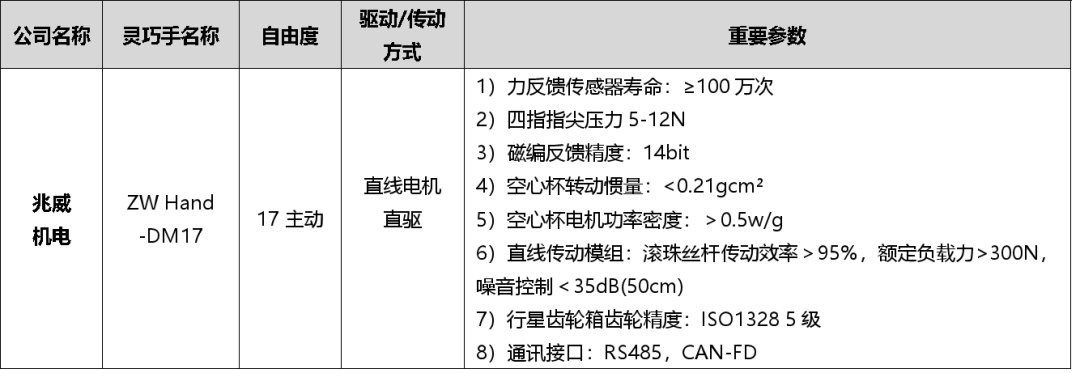
灵巧手Cyborg-H01基本参数信息
5.强脑科技
强脑科技(BrainCo)创立于2015年,致力于非侵入式脑机接口技术的研发与应用转化,以 “脑机科技,开启生命更多可能性” 为使命,目标是开发出全球领先的脑机接口产品,为残疾人康复、脑疾病治疗等领域带来变革。
公司产品覆盖智能仿生产品、智能健康产品以及智能教育产品三大领域。在机器人灵巧手方面,在2025 WRC上,强脑科技重点展示了其工业级别的仿生灵巧手Revo2系列产品:Revo 2基础版、Revo 2进阶版以及Revo 2触觉版。
Revo 2是基于假肢手与Revo 1灵巧手的技术迭代升级产品。该灵巧手内置6 个电机,具备 6个主动关节,共有11个自由度。单手重量 383g ,尺寸 160mm ,主动握力50N,单手负载 20kg。
另外,Revo 2 灵巧手可配备多维触觉感知能力,支持RS485、CANFD和EtherCAT多种通讯协议,最大支持 1KHz 通讯。支持SDK, 兼容Linux, Windows, ROS,支持高速二次开发。具备自定义手势,多重保护,伺服控制算法,触觉自适应抓握,OTA在线升级等等。

强脑科技灵巧手Revo 2(图片来源:强脑科技)
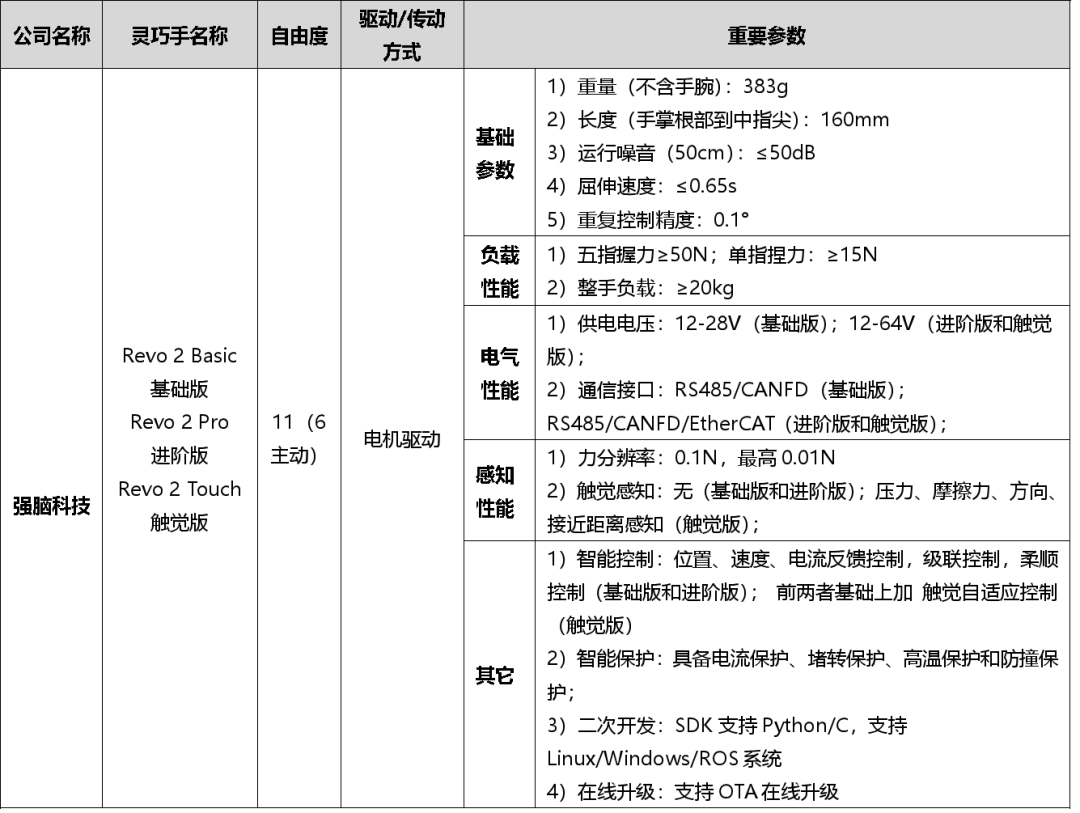
灵巧手Revo2系列产品基本参数信息
6.灵巧智能
浙江灵巧智能科技有限公司成立于2024 年 1 月,致力于以灵巧操作为核心科技驱动力,积极投身于推动人形机器人与工业机器人产业的蓬勃发展。
在公司定位上,灵巧智能专注于通用智能多模态触视感知的灵巧操作系统的研发、生产与销售,全力提升机器人末端执行器的技术水准。其主营产品以DexHand 系列灵巧手为代表,具有高自由度、多模态感知能力等优势。
在2025 WRC上,灵巧智能重点展示了其灵巧手产品RexHand 021量产版、RexHand 021 S和RexHand 021 Pro。
RexHand 021量产版:是一款工业级量产的五指灵巧手,拥有19 个自由度与 23 个内置传感器,借助视觉伺服和穿戴设备,可完成单手玩魔方、一手抓多物、使用常用工具等操作,兼具可靠、高集成、强兼容、易维护、低功耗及多模态特性。
RexHand 021 S:是一款款千元级三指灵巧手,主打“低成本高性能”,采用刚柔耦合传动专利设计,以特殊编织柔性绳索实现仿生自适应抓握,抓握力达 22N,支持 8 自由度灵活操控,可稳定抓取常见物品及灵活操控简单工具。
RexHand 021 Pro:是DexHand 021 的全面升级版,采用双绳驱正反向驱动系统、腕手协同、全域感知、集成端测算力四大核心技术,基于 22 自由度仿生架构(16 主动 + 4 被动 + 2 腕关节),实现力量性、灵活性、感知力全面突破,成为可量化评估灵巧度的机器人手部模组。
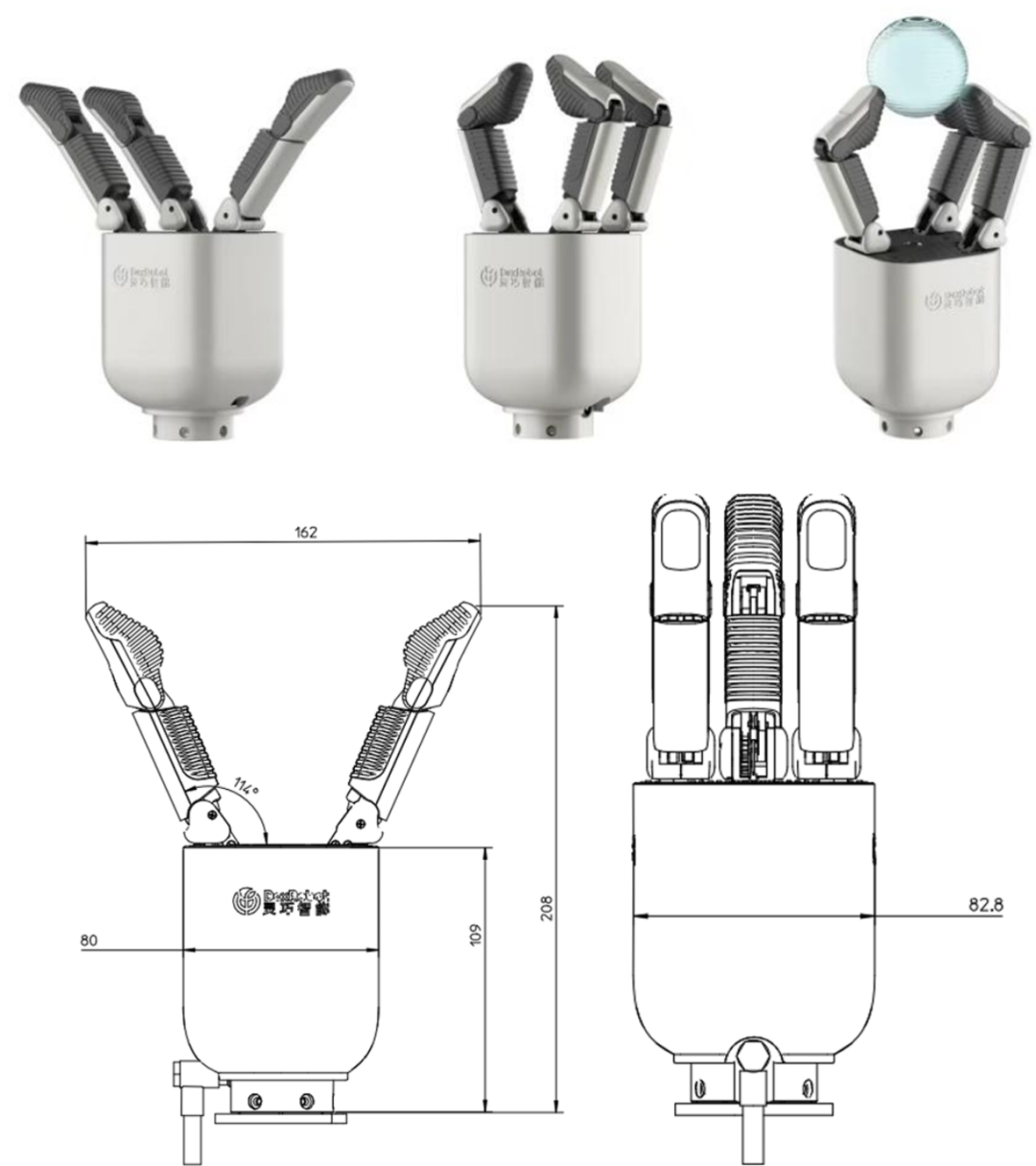
三指灵巧手RexHand 021 S(图片来源:灵巧智能)
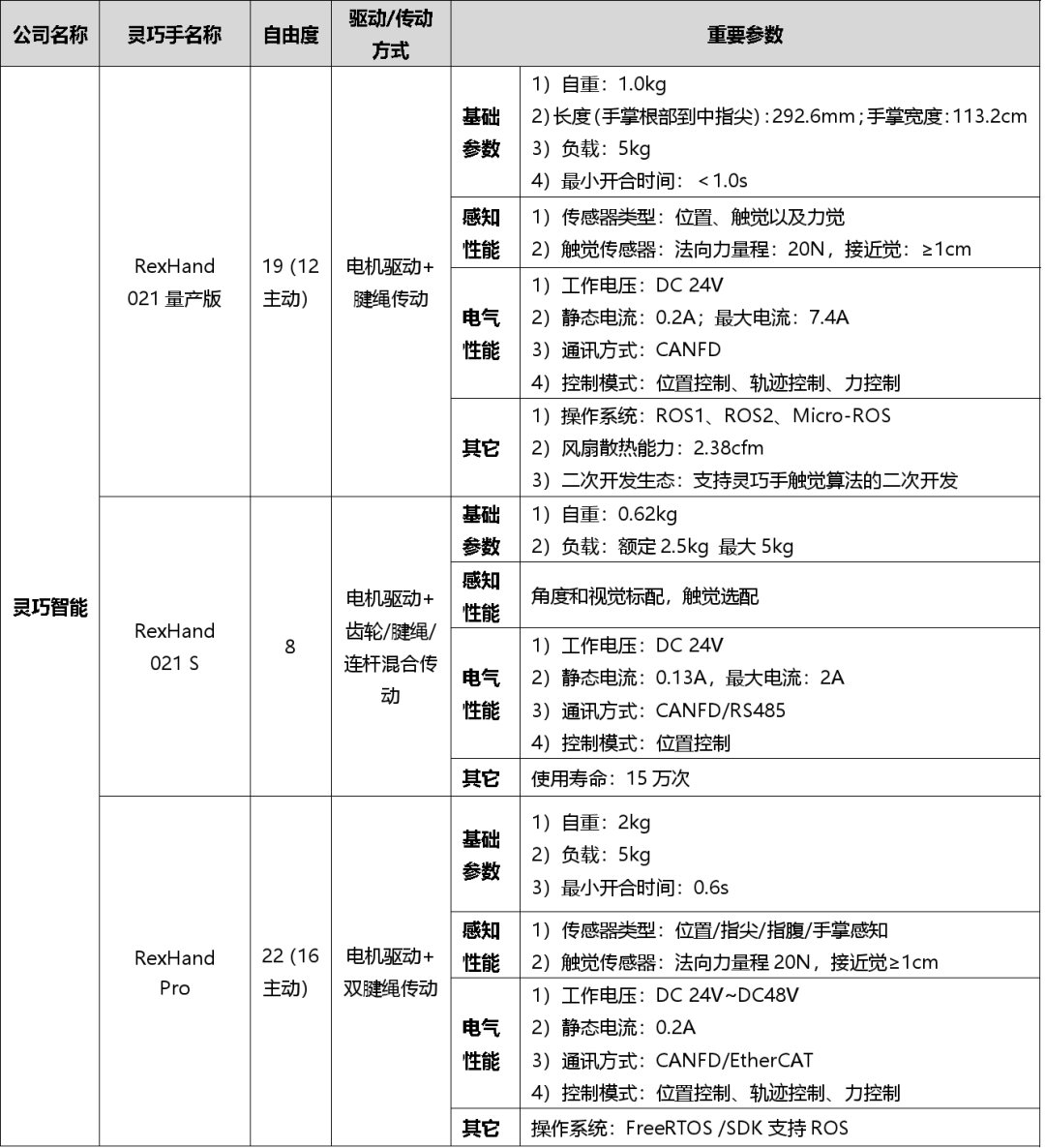
灵巧智能3款灵巧手产品基本参数信息
7.因时机器人
北京因时机器人科技有限公司于2016 年创立,总部位于北京石景山,是一家专注于微型精密运动部件研发制造,以及伺服控制技术突破创新的高新技术企业。
因时机器人将自身定位为机器人核心零部件与智能操作解决方案供应商,一直聚焦于核心零部件产品的开发。其主营产品主要有微型伺服电缸和灵巧手。
在2025 WRC上,因时机器人在灵巧手领域重点展示了 RH5EG1 系列和 RH56F1 系列五指灵巧手,此外,E2 系列、DFX 系列、BFX 系列等多款产品也同步亮相现场。
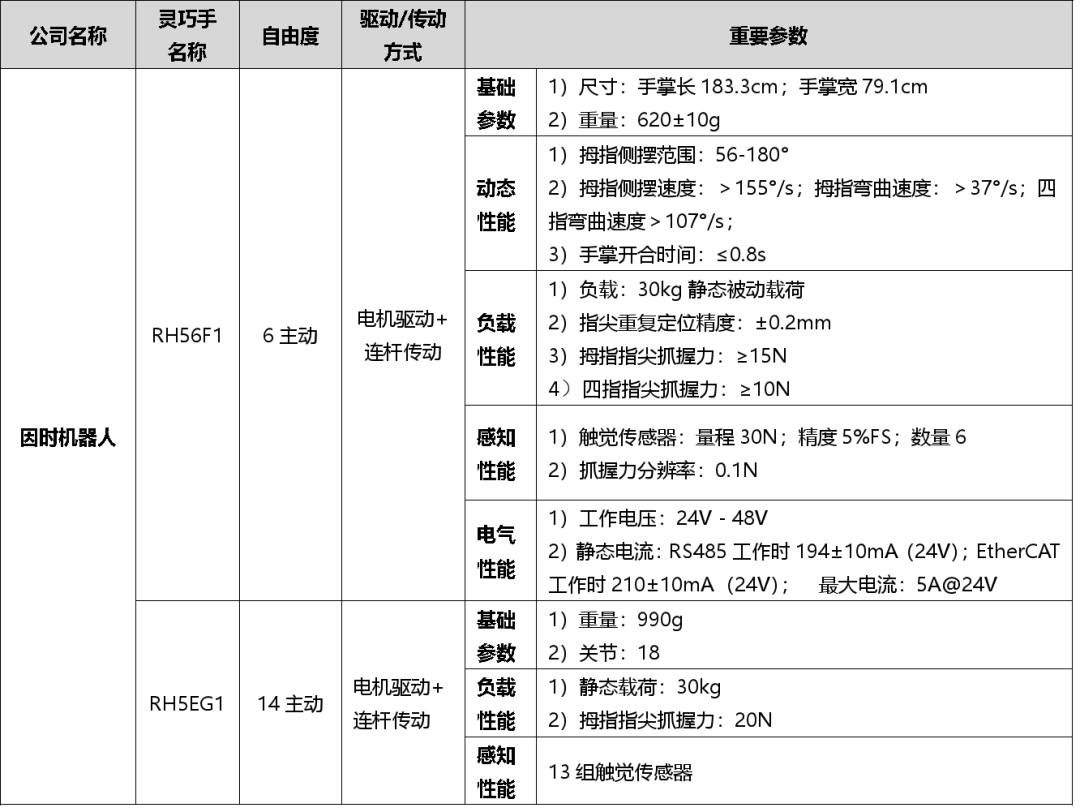
因时机器人2款灵巧手产品基本参数信息
8.中科灵犀
安徽中科灵犀有限公司成立于2024年9月,总部位于安徽合肥,由江苏雷利战略注资参股,是专注于人形机器人及核心零部件研发的技术型企业。
公司依托中国科学技术大学的研究成果,以“机械+硬件+算法”全栈技术整合打造灵巧手一体化方案,推动技术突破与产业化落地。该公司的主营产品围绕灵巧手展开,覆盖绳驱、连杆、行星丝杠、仿生关节及模拟平台等多种类型产品和技术。
在2025 WRC上,在灵巧手方面,公司重点展示了三款灵巧手产品:LQS-01-0100、LQS-02-0100和LQS-03-0100。
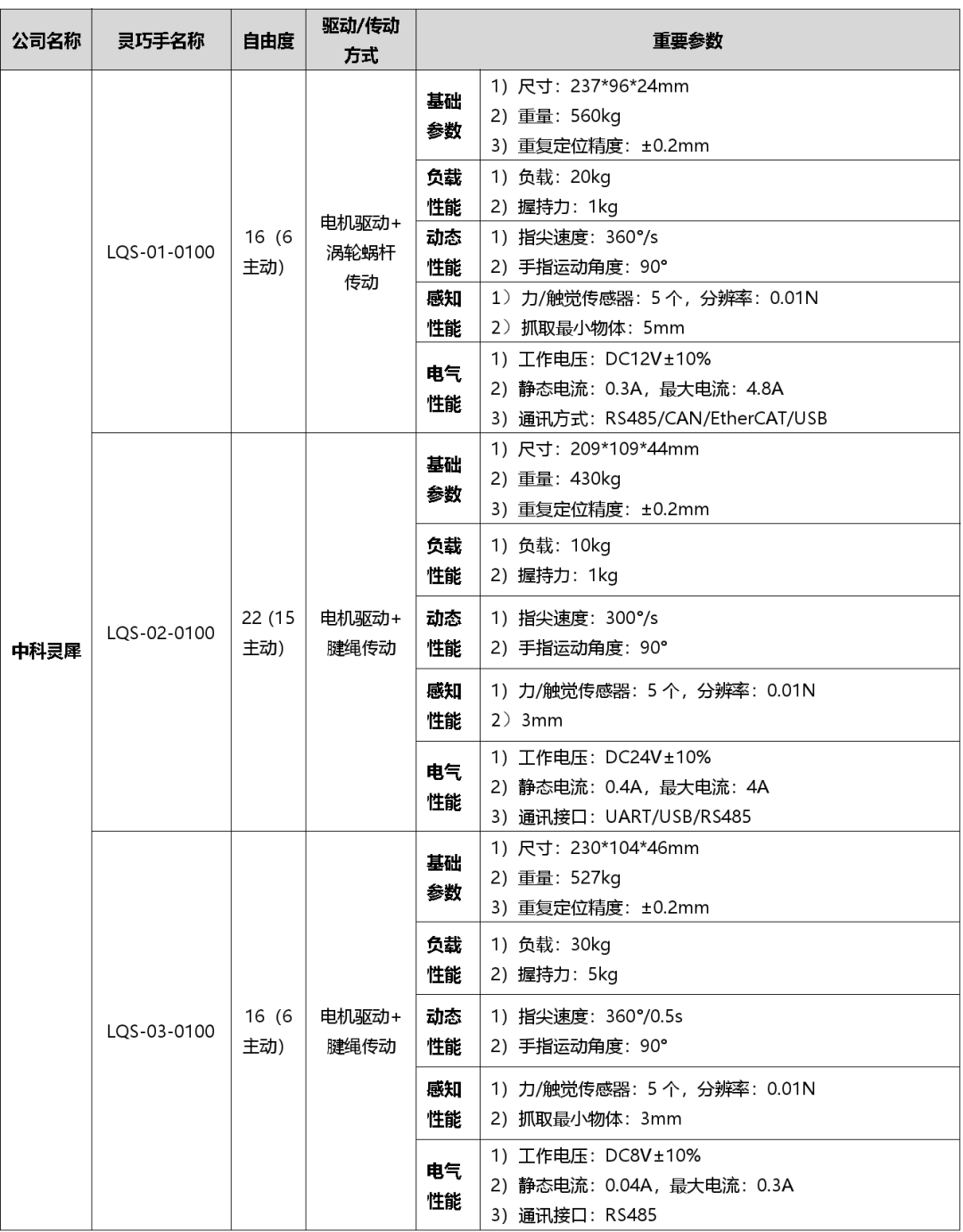
中科灵犀3款灵巧手产品基本参数信息
9.自变量机器人
自变量机器人科技(深圳)有限公司成立于2023 年 9 月 ,总部坐落于深圳市南山区。
自变量机器人的定位清晰且独特,主要体现在两个维度:
其一,作为具身智能的基础模型开拓者,其核心目标是构建独立于数字世界、融合感知、规划与控制的一体化系统架构,以此打造物理世界的基础模型;
其二,作为直接面向终端客户与消费者的软硬一体产品提供商,其核心路径是通过技术革新,为用户交付易用且智能的机器人产品。
在技术研发方面,公司自主开发的“Great Wall” 操作大模型系列的 WALL-A 模型,可整合各类感知数据、自然语言指令与运动控制信号,实现输入到输出的端到端精准映射。在产品端,公司推出了通用轮式双臂机器人量子1号、具身轮式仿人形机器人量子2号以及五指灵巧手ArtiXon Hand。
在2025 WRC上,自变量机器人展示了其五指灵巧手产品ArtiXon Hand。
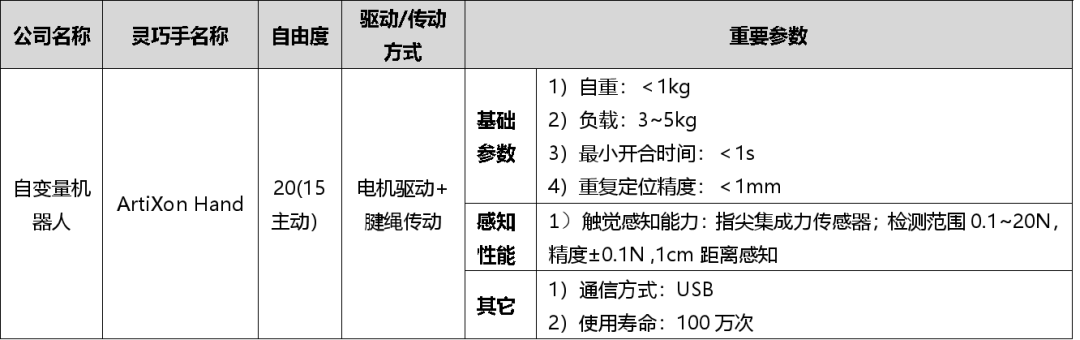
灵巧手ArtiXon Hand基本参数信息
10.曦诺未来
杭州曦诺未来科技有限公司成立于2024 年12月,是一家聚焦人形机器人核心零部件领域的企业,专注高扭矩密度一体化关节模组、微型电缸和高自由度灵巧手的研发、生产和销售,致力于为机器人厂商提供高性能电驱解决方案。
在2025WRC上,公司推出其首款全自研可量产灵巧手Xynova Flex 1。其采用全腱绳传动架构,通过钢缆模拟人体肌腱传递动力,突破自由度限制。该灵巧手拥有 25个自由度(含 20个主动自由度),重复定位精度达 0.2 毫米,仅重 380 克,能复现超过 90% 的人手精细动作,指尖力可达 20N 。
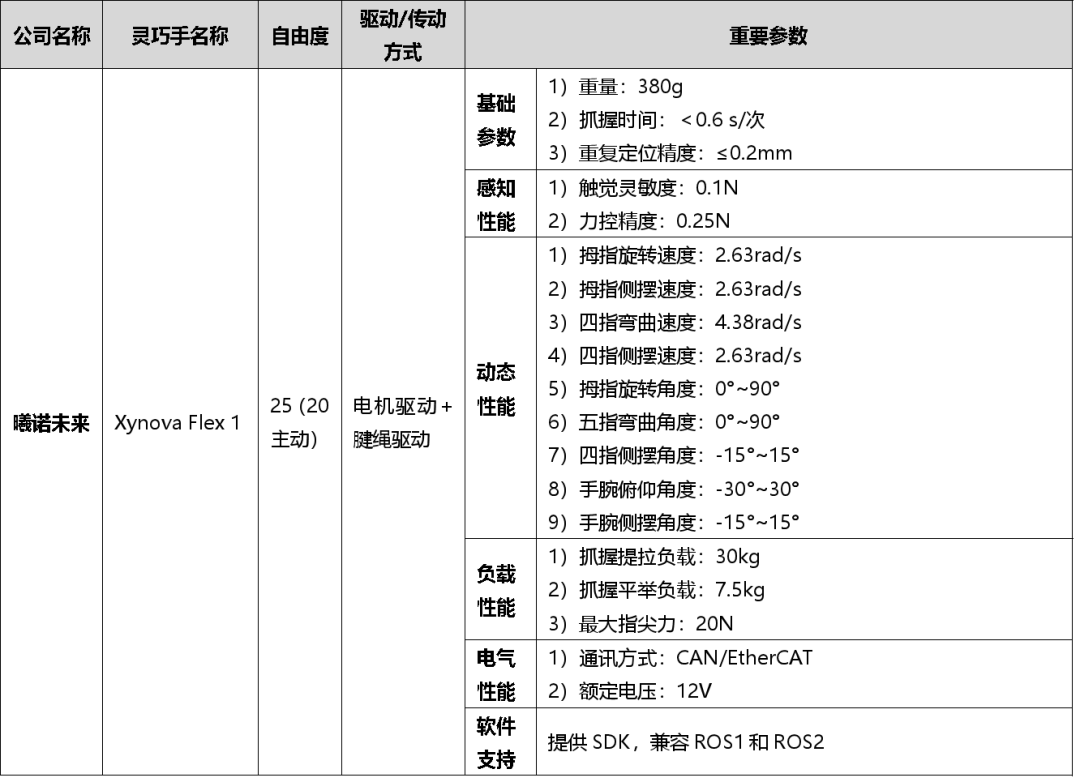
灵巧手Xynova Flex 1基本参数信息
11.灵心巧手
灵心巧手(北京)科技有限公司成立于2023 年7月,总部位于北京海淀区。公司将自身定位为以 “灵巧手 + 云端智能” 为核心的具身智能平台的开拓者。
在产品端,其自主研发的Linker Hand 系列灵巧手覆盖多种传动类型:直驱、连杆结构和腱绳结构,实现了灵巧手技术路线的全覆盖。产品自由度多样,从 6 到 42 个自由度不等,电机和减速器等核心零部件均为自主设计研发。
除灵巧手产品外,公司还打造了动捕遥操系统、灵巧操作数字孪生平台等平台化产品,通过软硬件协同,助力企业客户、科研机构及个人开发者实现灵巧手在真实场景中的应用。据悉,目前,Linker Hand 系列产品月销量超千台,在全球高自由度灵巧手市场的占有率达 80%,处于行业领先地位 。
在2025WRC 上,灵心巧手除展示 Linker Hand O7、L10、L20、L30 及 L30 直驱版等产品外,还推出了全新的 Linker Hand O6 灵巧手。该款产品拥有 6 个主动自由度和 10 个被动自由度,采用小型化设计,整手尺寸接近常人女性手掌大小。
Linker Hand O6 运用多种新型创新材料,实现了整手的轻量化设计,大幅减轻了作为末端执行器的灵巧手本体重量,在医疗假肢替代、小型人形机器人灵巧操作等领域展现出广阔的应用前景。
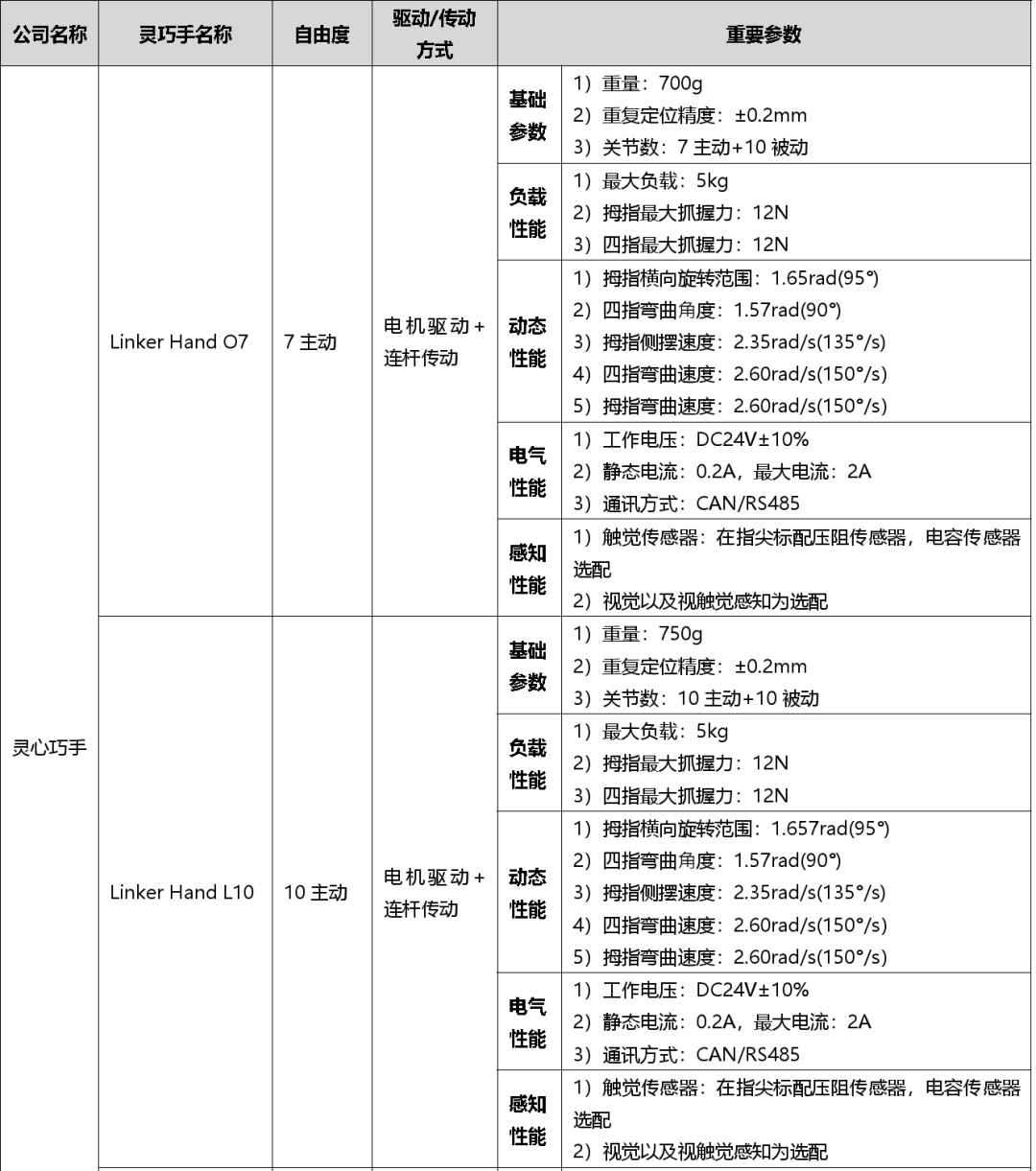
灵心巧手5款灵巧手基本参数信息
12.戴盟机器人
戴盟(深圳)机器人科技有限公司于成立于2021年12月,总部位于深圳市宝安区,是一家专注于具身智能领域的创新型企业,致力于为多行业提供前沿的机器人技术解决方案。
该公司由香港科技大学科研团队孵化而来,在视触觉传感器、多指灵巧手设计制造、类人行为学习与泛化,以及含视觉触觉的感知操作大模型等前沿领域拥有深厚的技术积累。戴盟机器人将自身定位为触觉感知与灵巧操作领域的颠覆者,聚焦于推动机器人“具身技能” 及具身智能在现实场景中的广泛应用。
公司的主营产品包括视触觉传感器、视触觉灵巧手、穿戴式遥操作系统和含触觉的操作模型。
在2025WRC上,戴盟机器人展示了其多维触觉感知五指灵巧手产品——DM-Hand1。
戴盟机器人灵巧手产品-DM-Hand1
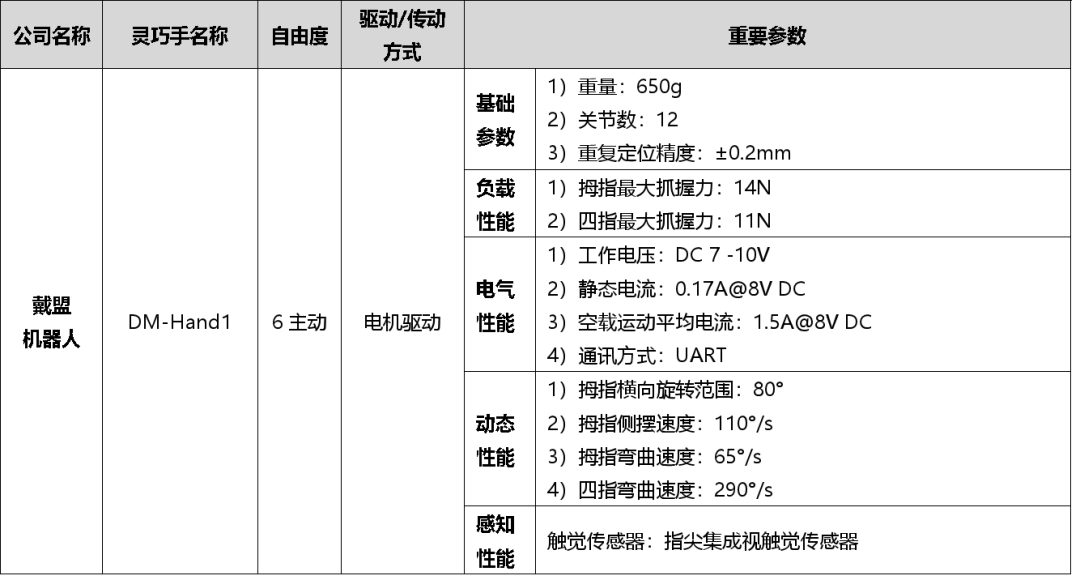
灵巧手DM-Hand1基本参数信息
13.伟景智能
北京伟景智能科技有限公司成立于2016年6月,是一家专注于立体智能视觉系统和智能人形机器人研发、生产及应用的高科技人工智能公司。
公司拥有3D立体智能相机整体解决方案和完整的智能机器人的生产线,并形成了以自主核心算法、核心软件、核心硬件及行业系统解决方案为一体的全产业价值链。
在2025 WRC上,伟景智能正式发布其第三代灵巧手产品。该产品自由度高达16个,单指最大指尖力达12N,单支灵巧手售价为1.8万元。

伟景智能第三代智能灵巧手
14.中科硅纪
中科硅纪(南京)机器人有限公司于2024 年5月 ,是一家专注于通用类人灵巧操作机器人技术研发的企业,由中科南京人工智能创新研究院孵化,技术团队源自中国科学院自动化研究所多模态人工智能系统全国重点实验室 。
公司定位为通用类人灵巧操作具身智能机器人领域的引领者,聚焦于机器人“上肢” 通用灵巧操作能力的提升。据了解,其核心竞争力在于仿人灵巧手,从灵巧操作具身智能算法,到结构、驱动、传感器、集成电路等硬件,均为团队自主研发,实现了核心零部件100%国产化 。
在2025WRC 上,在灵巧手方面,中科硅纪展示了通用智能灵巧手Casia Hand-L1/L2、高速自适应灵巧手Casia Hand-S、三指灵巧手Casia Hand-G。
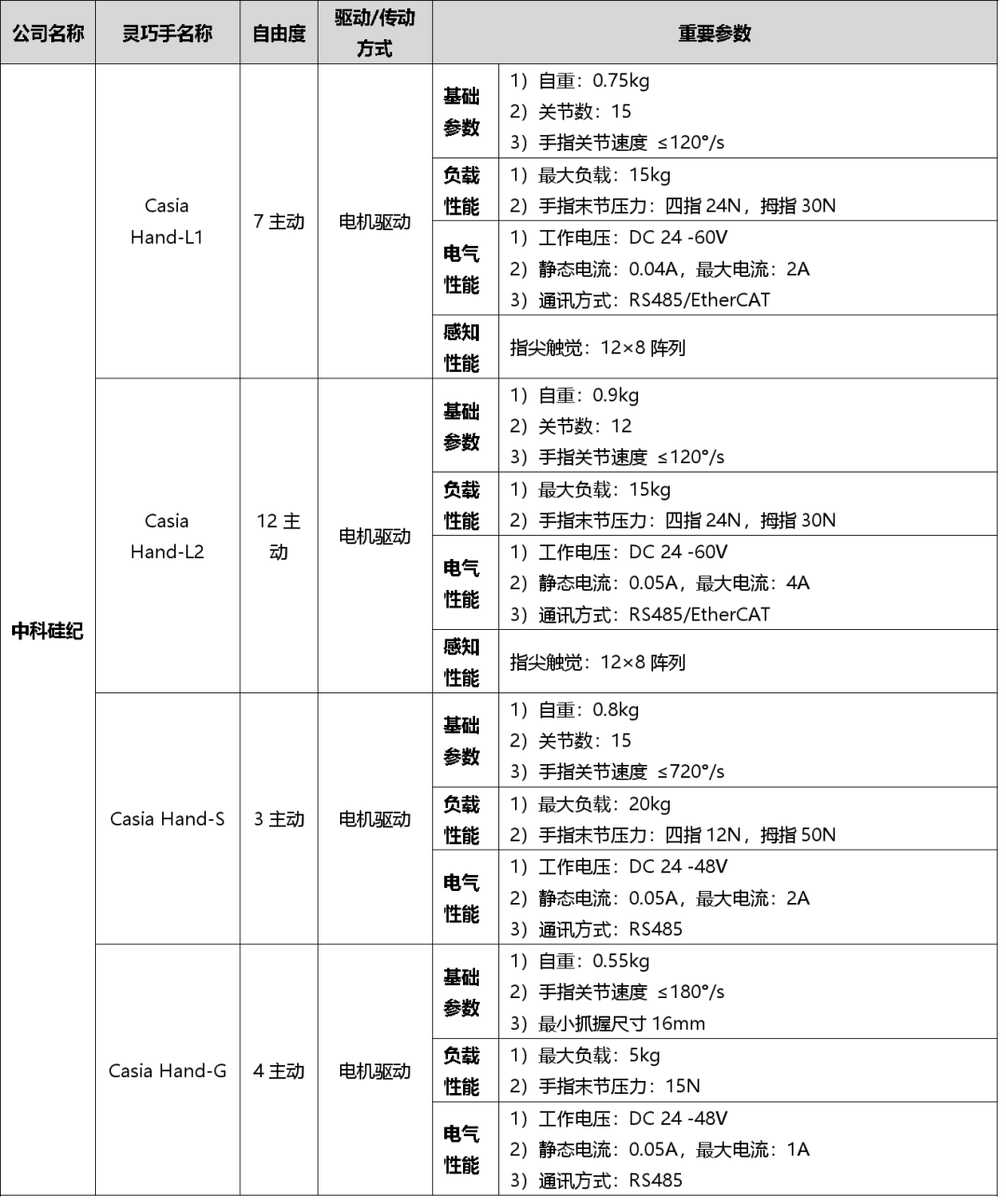
中科硅纪四款灵巧手基本参数信息
15.睿研智控
深圳市睿研智能控制有限公司成立于2021 年9月,总部位于深圳市南山区,是一家专注于机器人核心零部件研发与生产的创新型企业。
公司主营产品涵盖机器人关节模组、灵巧手、编码器、驱动器等。2025 年 7 月,睿研智控完成天使轮融资,投资方有稳正资产、基石资本、国宏资本。此轮融资将助力公司在机器人核心零部件尤其是灵巧手领域加大研发与生产投入 。
在2025 WRC上,睿研智控展示了其三大系列灵巧手产品:RY-H1、RY-H2及RY-H2pro。其中,RY-H1有16主动自由度和21运动关节;RY-H2 标准版拥有6个自由度和11个运动关节,内置6个高速高功率密度空心杯无刷电机。而RY-H2 Pro则在标准版基础上优化结构,拥有6个自由度和16个运动关节,形态更拟人,抓握效率更高,能更好适应不同形状物体的抓取,进一步拓展了应用边界。

16.大寰机器人
大寰机器人成立于2016 年,是一家聚焦工业智能制造场景,提供核心零部件的国家级高新技术企业,总部位于深圳,服务体系覆盖全球多地。
公司的主营产品包括伺服电动夹爪、音圈执行器和伺服电缸三大核心产品系列。在2025WRC 上,大寰机器人展示了第二代触觉灵巧手产品——DH-5-6。
该灵巧手内置6个由大寰机器人自主研发的微型伺服电缸,并引入力位混合控制策略,在抓取与操作过程中可根据任务需求灵活切换力控制与位控制,实现对接触力和运动轨迹的双重精准调节
在触觉感知方面,DH-5-6灵巧手可选配阵列高灵敏触觉传感器,分别布设于指腹、手掌等关键接触区域,能够精准感知物体的材质、纹理、形状、软硬程度、滑动状态及压力变化。
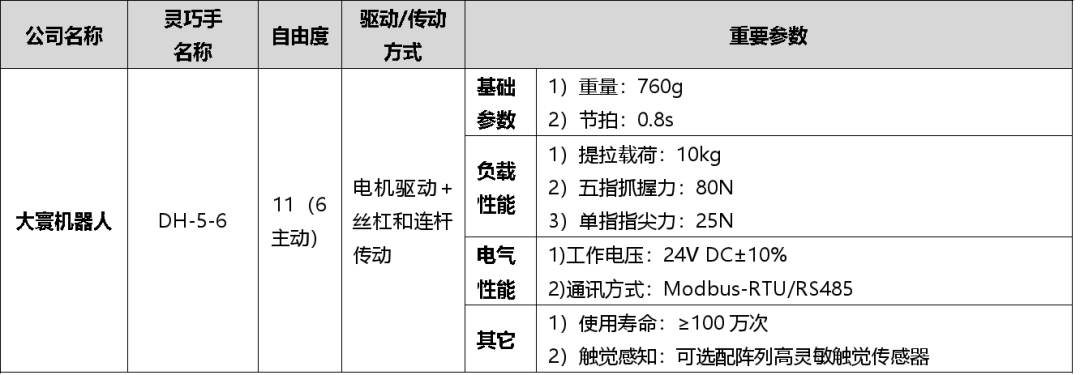
灵巧手DH-5-6基本参数信息
17.帕西尼
帕西尼感知科技(深圳)有限公司于成立于2021 年 6 月。公司定位为致力于开发全球领先的全场景应用触觉数字化与触感技术的企业,其创始成员来自日本早稻田大学机器人实验室。
帕西尼专注于 6D 霍尔阵列式多维触觉感知与具身智能核心技术,是全球少数可实现高精度多维触觉传感器自主可控及规模可靠量产的企业。据了解,到目前为止,该公司已率先发布了搭载HAPTA异构多核阵列软硬件架构的ITPU多维触觉处理单元,以及基于触觉与视觉多模态感知模型的人形机器人TORA-ONE和触觉灵巧手DexH系列。
因此,公司产品线覆盖了从"传感器核心零部件"到"人形机器人整机制造"的全链路环节,并已实现批量商业级交付,客户群体涵盖智能制造、康养医疗、工业生产、消费电子等重点领域。
在2025 WRC 上,帕西尼展示了第三代协作型多维触觉自适应灵巧手 GMH18。这款灵巧手配备 5 指 18 自由度,其中拇指独有的 5 个自由度可支持精准抓握与复杂姿态调整;中指、无名指、小指则采用欠驱动多连杆设计,能智能贴合各类异形物体表面并自动调整指节姿态,轻松抓取日常物品。
负载性能上,GMH18 的额定负载提升至 20kg,通过结构优化与自锁设计,可确保重物抓取长期稳定无滑脱,轻松应对繁重搬运任务。感知性能方面,整手搭载上千个第三代 ITPU 多维触觉传感单元,全面覆盖指甲、指尖、指腹及掌心等关键部位,不仅实现了精准的感知能力,还显著提升了接触适应性。
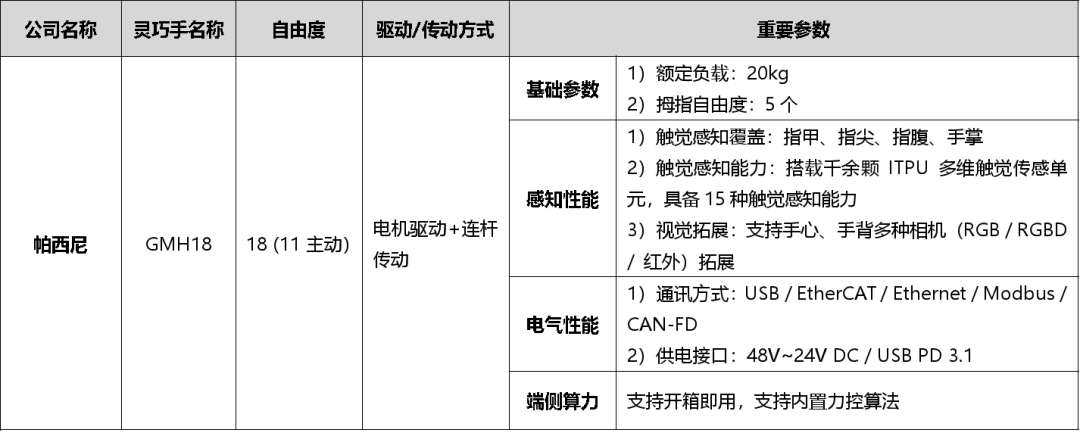
灵巧手GMH18基本参数信息

推荐阅读





×
右键可直接复制图片