 阅读时间大约7分钟(2575字)
阅读时间大约7分钟(2575字)
2025-09-22 特斯拉Optimus灵巧手到底有多难造?
来源:人形机器人洞察研究
人类手部进化用了几百万年,特斯拉需要在几年内完成。
作者:天南 出品:人形机器人洞察研究
前段时间马斯克提到:目前Optimus3最大的卡点就是灵巧手和前臂。
可目前大多数国内厂商基本还集中在运动能力控制、简单的夹爪VLA技术上,还没有涉及到占人类活动50-60%的手部硬件设计和大脑技术协同上。
特斯拉目前在灵巧手的设计是跑的相当快的厂商。
本周末刚好有专家访谈,古斯塔夫(Gustav Andersson),是瑞典的手部专家,他分享了从人类手掌的进化奥秘到Optimus手的技术死胡同,才发现造一双 “像人一样用的手”,比造火箭还考验细节。

古斯塔夫(Gustav Andersson)专家访谈截图要点总结
要点总结
1、人类手掌进化存在巨大优势:
80% 肌肉在前臂,借肌腱操控手指,有 27-28 个自由度;小指助握稳重物、指甲支撑指尖实现捏取,是 “进化天花板”,动物界难有类似全能结构。
2、Optimus 技术难题:
零件必须自研,早期前臂因零件粗,移零件至躯干又遇信号延迟;触觉 / 本体感觉不足,难判物体软硬滑涩;手指难单独活动,拇指碰不到小指。
3、特斯拉应对举措:
借鉴人类手掌(如 Optimus 3 小指可外展),去咨询医生研究 “线缆控多关节” 方案,兼顾手部纤细与灵活性。
4、Optimus3手掌难题未来想象:
Optimus Gen 3 攻克模仿手掌内在肌肉难题;机器人手耐力强但需平衡安全;“造像人会用的手难”,需重视细节,Gen 3 大改版将推动落地。
01
先搞懂:人类的手为什么是 “进化天花板”?
古斯塔夫医生一开口就抛出个反常识的观点:“手掌的力量来自手心?那不是的,其实80% 的肌肉都藏在前臂里。”
我们的手更像个 “提线木偶”,前臂肌肉通过肌腱拉动手指,就像无数根精准的绳子操控木偶关节。
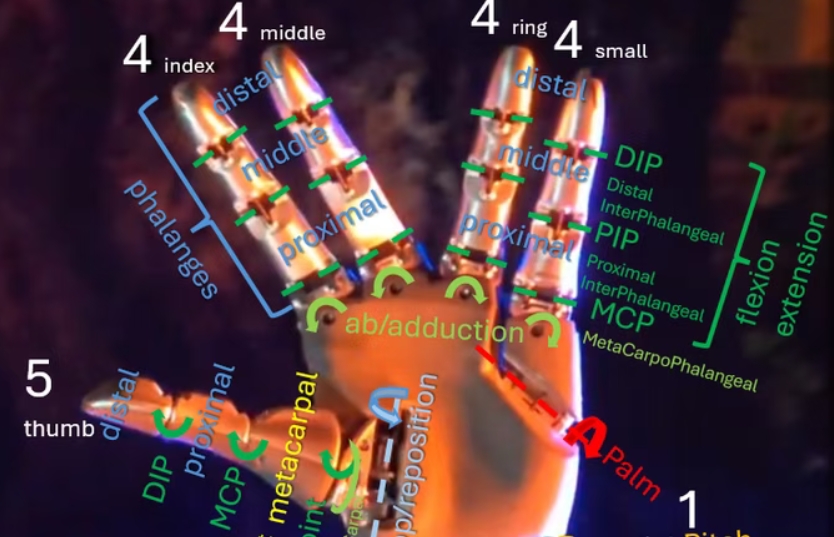
更惊人的是手掌的 “自由度”——专业说法是 27 到 28 个活动维度。简单说,你能弹钢琴、拧瓶盖、穿针引线,甚至拆汽车零件,全靠这些维度的配合。
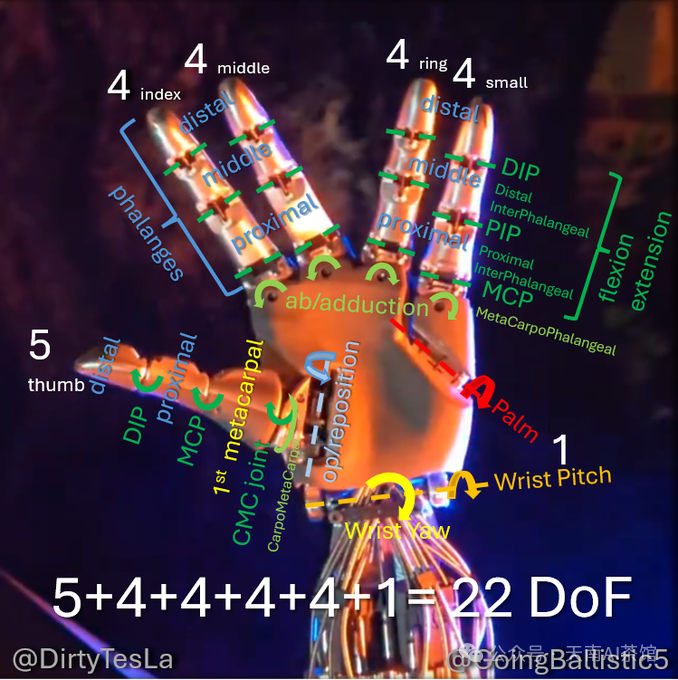
假设v3 Optimus仍采用22自由度(关节)的手部结构,由于其采用肌腱驱动机制,所有主关节和从动关节的正负方向运动需配备24个执行器 ,前臂另需两个执行器分别控制腕部俯仰与偏航 ,总计26个执行器
古斯塔夫举了个例子:“你用 tripod grip(三脚架抓握)拿笔时,拇指、食指、中指的配合精度,相当于机器人要在 0.1 毫米内调整 3 个关节的力度。”
这个难度是非常大的。
而且人类手掌藏着很多“反直觉设计”:比如小指其实比食指更重要。“
如果必须失去一根手指,我会选食指,” 古斯塔夫笑着说,“小指能帮你握稳重物,减少其他手指的受力。
你试试握个水杯,蜷起小指,马上会觉得杯子要滑。” 就连指甲都不是 “装饰”—— 没有指甲支撑,指尖的软肉会晃动,你连硬币都捏不起来。
02
特斯拉的难题:买不到零件
马斯克前段时间说“Optimus 的手找不到现成零件”,这话一点不夸张。
该专家医生透露,特斯拉团队连最基础的 “驱动器” 都得自己设计:“市面上有上万个电动马达,但没有一个能像人类肌腱那样,又细又有韧性,还能精准控制力度。”
他们面临的第一个坎,就是 “模仿木偶结构”。人类前臂的肌肉能通过细长的肌腱传递力量,可机器人要做到这点,得把马达、齿轮、电路板压缩到前臂大小。
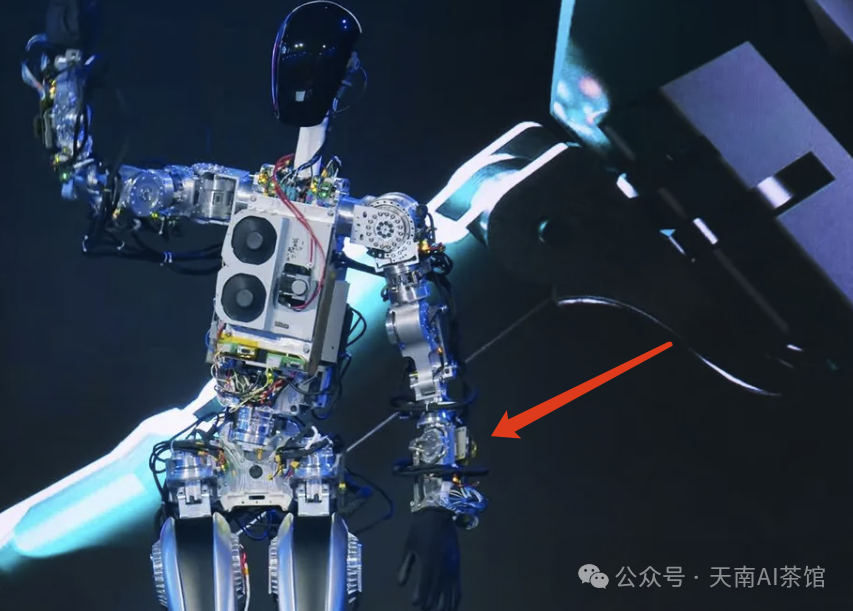
假设最初Optimus的前臂非常粗,是因为里面塞满了执行器。
早期 Optimus原型的前臂看起来很粗,就是因为塞满了这些零件。“现在他们把部分零件移到躯干里,手才变纤细。”

Optimus2 和Optimus2.5的对比图↑
古斯塔夫指着 Optimus 2.5 的图片说,“但这又带来新问题 ——信号传输延迟,手指反应会变慢。”
更难的是 “握力控制”。你拿鸡蛋时会自动调整力度,可机器人得靠传感器计算 “多大劲不会捏碎壳,又不会掉”。
古斯塔夫举了个临床案例:“有些病人失去手部感觉后,连拿袜子都要把袋子倒空 —— 因为他们不知道摸到的是不是袜子。机器人要是没有精准触觉,比这还笨拙。”
聊到触觉,古斯塔夫医生突然严肃起来:“我见过很多装了肌电假肢的病人,最后都把假肢摘了 —— 不是不好用,是没有感觉。”
人类的手能同时感知压力、温度、滑动,比如你摸到热水会立刻缩手,摸到湿滑的肥皂会下意识握紧。
特斯拉在 Optimus 手上装了触觉传感器,但离 “人类水平” 还很远。“他们能让机器人知道‘捏到东西了’,但不知道‘捏的是软的还是硬的’,”
古斯塔夫解释,“比如拧瓶盖,你能通过触感判断‘拧紧了没’,机器人得靠视觉盯着瓶盖转了多少圈 —— 这在昏暗环境里根本行不通。”
更有意思的是 “本体感觉”—— 你闭着眼睛也能摸到自己的鼻子,靠的就是关节和肌肉里的传感器。
机器人要做到这点,得在每个关节装角度传感器,还要通过 AI 计算 “手指现在的位置”。

Optimus2 + 疑似22自由度的灵巧手接球视频截图↑
“Optimus 现在能接住球,就是靠视觉预判 + 本体感觉调整,” 古斯塔夫说,“但要是球上沾了水,它可能就接不住了 —— 因为传感器没感知到‘滑’。”
03
为什么说 “没有触觉的手,不如没有手”?
有人问 “能不能学动物的手”,古斯塔夫医生笑着摇头:“蜥蜴的爪子适合抓树枝,猿猴的拇指太短,只有章鱼的触手能灵活抓东西,但它没有骨头,机器人没法模仿。”
人类手的独特之处,在于 “兼顾力量和精细动作”——你能挥棒球棍,也能穿针引线,这在动物界几乎找不到第二个。
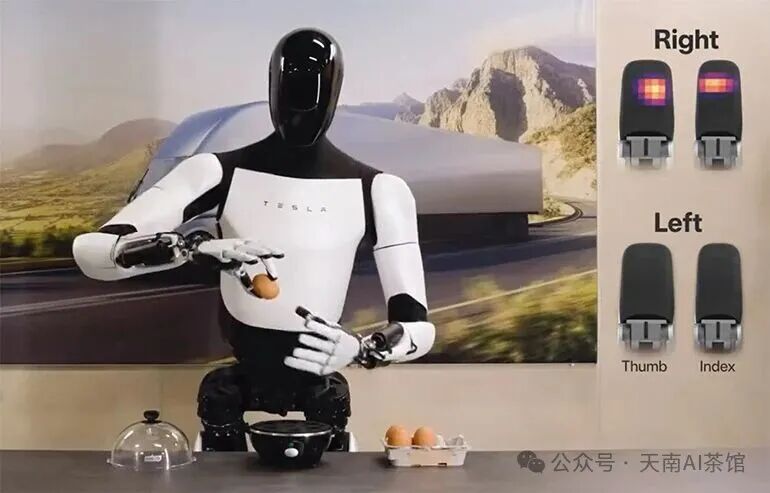
Optimus 2拿鸡蛋的触感皮肤感知↑
不过特斯拉也借鉴了一些 “进化智慧”。比如 Optimus 3 的设计里,小指能轻微外展(就是往外撇一点),这和人类弹吉他时的动作很像。
“古猿的小指不能外展,是人类进化中为了抓握工具才发展出这个功能,” 古斯塔夫说,“特斯拉注意到这点,说明他们真的研究过手掌解剖学。”
但也有 “没学到位” 的地方。比如 Optimus 的拇指还没法碰到小指,只能碰到中指。“人类能做‘拇指对小指’的动作,是因为手掌里有块特殊的小肌肉,” 古斯塔夫比划着,“现在只有 Clone Bot 的机器人能做到这一点 —— 但它的手又太笨重,没法量产。”
古斯塔夫医生最期待 Optimus Gen 3 的,是 “能不能模仿手掌里的小肌肉”。人类手掌里藏着 20 多块 “内在肌肉”,负责精细动作,比如打字时手指的独立活动、写字时笔尖的细微调整。
“现在 Optimus 的手指动作,更像‘一起动’,” 古斯塔夫解释,“比如弹空气吉他,它的手指是同步弯曲的,不像人类能单独动无名指。”要解决这个问题,特斯拉得在手掌里装微型驱动器 —— 但这又会让手变粗,陷入 “纤细” 和 “灵活” 的两难。
不过也有好消息。
古斯塔夫透露,特斯拉团队已经咨询过硅谷的手外科医生:“他们在研究‘如何用一根线缆控制多个关节’,就像人类肌腱那样。如果能做到,Gen 3 的手会更灵活,还不会变粗。”
04
最后聊聊:机器人手会比人类手更强吗?
当主持人问 “未来机器人手能不能捏碎金属”,古斯塔夫医生先笑了:“从技术上能做到,但没必要。”
人类的手是 “平衡的产物”—— 有力量但不会伤到自己,有精细度但不会太脆弱。“特斯拉故意让 Optimus 的动作慢一点,力气小一点,” 他说,“要是机器人手能捏碎金属,万一碰到人怎么办?”
但他也承认,机器人手有 “进化优势”。比如人类手不能长时间保持一个姿势(比如举着杯子不动),机器人能;人类手会累会受伤,机器人只要零件没坏就能一直工作。“未来可能会出现‘混合手’,” 古斯塔夫畅想,“比如在机器人手里装人类的触觉传感器,既有机器的耐力,又有人的感知力。”
聊到最后,古斯塔夫指着自己的手说:“进化用了几百万年才造出这双手,特斯拉才研究了几年 —— 慢一点没关系,关键是别忽略那些‘看似不重要的细节’,比如小指的作用、指甲的支撑力。毕竟,造一双‘能用的手’容易,造一双‘像人一样会用的手’,才是真本事。”
现在 Optimus Gen 3 还没露面,但从马斯克 “大改版” 的说法来看,特斯拉确实在攻克这些难题。
或许再过两年,我们就能看到机器人用和人类一样的姿势,拧开一瓶汽水,或者写下一行字 —— 到那时,我们才真正离 “人形机器人走进生活” 近了一步。
参考资料:https://www.youtube.com/watch?v=PKl-2KqzoiE&t=418s

推荐阅读





×
右键可直接复制图片