
 阅读时间大约10分钟以上(5468字)
阅读时间大约10分钟以上(5468字)
2025-09-30 人形机器人的“灵动心脏”:无框力矩电机全景解析
来源:科尔摩根
无框力矩电机的性能,直接关乎人形机器人的整体性能表现,是推动人形机器人从概念走向实际应用的关键力量。
作者:仲翔云 出品:人形机器人产业通
当特斯拉宣布 Optimus 机器人将摒弃传统动作捕捉方案,转而借助员工日常操作视频开展训练时,这一决策犹如投入湖面的巨石,在业界激起千层浪,也昭示着具身智能的学习范式正经历着一场深刻变革。

人形机器人热潮下的关键角色
近年来,人形机器人的发展可谓是如火如荼,从特斯拉的 Optimus 到小米的 CyberOne,再到宇树科技的 Unitree H1,这些明星产品不断刷新着大众对人形机器人的认知。它们的应用场景也日益广泛,在工业领域,能承担如汽车制造中的零部件组装、3C 产品生产线上的精密操作等任务 ;在服务行业,可作为酒店的接待员、餐厅的服务员,甚至是家庭中的护理助手,帮助照顾老人和小孩;在危险环境作业中,比如火灾、地震救援现场,以及核辐射区域,人形机器人能够代替人类执行高风险任务,保障救援人员的安全。
在人形机器人实现这些复杂且精妙功能的背后,无框力矩电机扮演着举足轻重的角色。如果把人形机器人比作一个鲜活的生命体,那么无框力矩电机就如同人类的肌肉,为机器人的各个关节提供精准且强大的动力,决定了机器人动作的灵活程度、力量大小以及控制精度,是实现人形机器人拟人化运动的核心部件。毫不夸张地说,无框力矩电机的性能,直接关乎人形机器人的整体性能表现,是推动人形机器人从概念走向实际应用的关键力量。
无框力矩电机的独特 “身世”
(一)结构与工作原理解析
无框力矩电机的结构设计十分独特,它摒弃了传统电机中常见的轴、轴承、外壳以及端盖等部件,仅保留了最为核心的转子和定子。转子一般由永磁体旋转钢圆环组件构成,能够直接安装在传动轴之上,而定子则是一个带有铜丝的圆环,由多个铜绕组线圈绕在钢片上,并固定在机械结构当中 。这种简洁的结构,使得无框力矩电机在体积和重量上相较于传统电机具有明显优势,能够更好地满足人形机器人对轻量化和紧凑结构的需求。
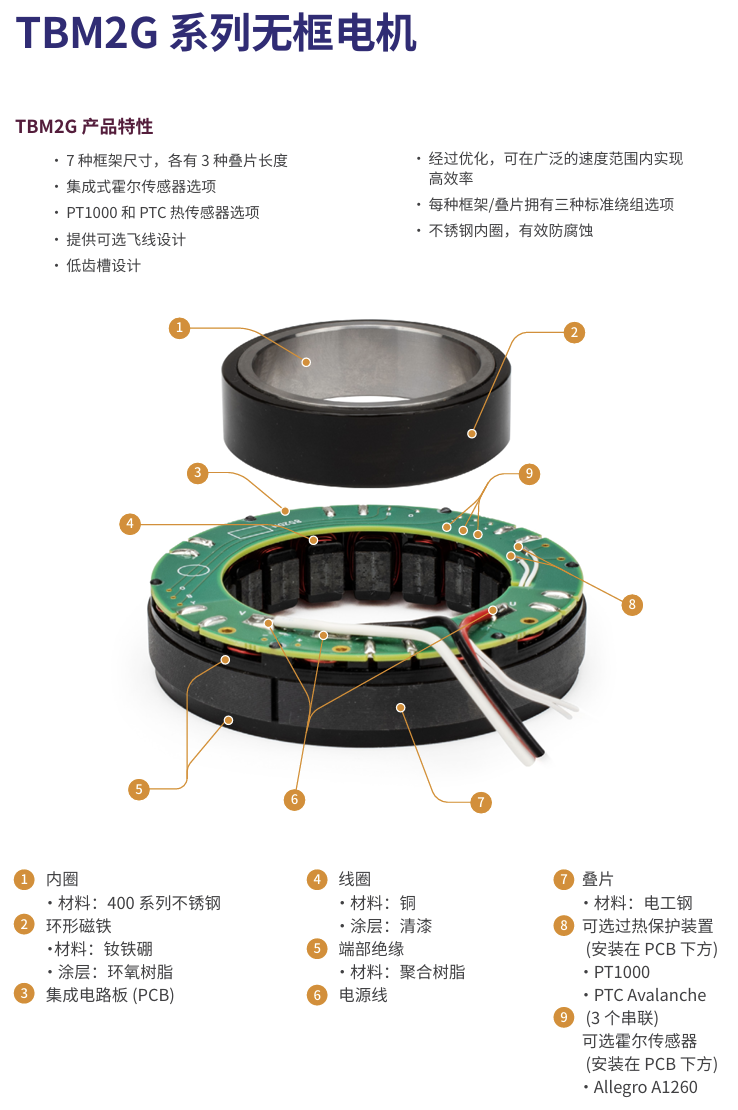
来源:科尔摩根官网
从工作原理来看,无框力矩电机与无刷电机有相似之处。当驱动器为电机提供电力时,三相电在定子线圈中激发出一个旋转的电磁场,这个旋转的电磁场会与转子中的永磁体相互作用。根据电磁感应定律,这种相互作用会产生电磁转矩,进而驱动转子进行旋转,为人形机器人的关节提供精准的动力输出。以特斯拉的 Optimus 人形机器人为例,其全身 28 个关节所搭载的无框力矩电机,正是通过这种电磁相互作用,使得机器人能够做出行走、抓取物体等复杂且灵活的动作。
(二)从诞生到应用的发展历程
无框力矩电机的发展历程是一部科技创新不断突破的历史。它最初诞生于对电机性能有着极致追求的领域,凭借其独特的优势,在一些高端应用场景中崭露头角。早期,无框力矩电机主要应用于航空航天领域,像飞行器的飞行控制体系,其轻量化和高可靠性的特点,能够满足飞行器对设备重量和性能的严苛要求,助力飞行器实现更加灵活和精准的操控;在高端机床领域,无框力矩电机为精密加工提供了强大而精准的动力支持,帮助实现高精度的切削和定位。
随着机器人技术的迅猛发展,无框力矩电机找到了更广阔的应用天地,尤其是在人形机器人领域。人形机器人对电机的体积、重量、扭矩输出以及响应速度等方面有着近乎苛刻的要求,而无框力矩电机的高扭矩密度、低转动惯量、快速响应等特性,恰好能够完美契合这些需求。2016 年,步科初代无框电机上市,性能可与进口品牌相媲美,这标志着国内在无框力矩电机领域迈出了重要一步。此后,越来越多的企业和科研机构投身于无框力矩电机的研发和生产。特斯拉人形机器人 Optimus 全身搭载无框力矩电机的应用案例,更是让无框力矩电机在人形机器人领域的重要性得到了前所未有的关注,进一步推动了该领域的技术发展和产业进步。
设计要点深度剖析
(一)高扭矩密度的追求
高扭矩密度是无框力矩电机设计的关键目标之一,对于人形机器人而言,这一特性尤为重要。在人形机器人的运动过程中,其关节需要频繁地承受各种不同方向和大小的力,以实现行走、抓取、攀爬等复杂动作,这就要求无框力矩电机能够在紧凑的结构下输出足够大的扭矩 。
为了实现高扭矩密度,工程师们在磁路设计方面进行了深入的优化。其中,分布式分数槽设计是一种常用的有效方法。这种设计通过合理地分布定子槽和绕组,能够减少齿槽转矩,提高电机的效率和扭矩输出。以德国 TQ Robodrive 的无框力矩电机为例,其采用的 20 极 18 槽磁路布局,使得电机在有限的空间内实现了更高的扭矩输出和能量转换效率。同时,碳纤维绑扎技术也被广泛应用于无框力矩电机的转子设计中。碳纤维具有高强度、低密度的特点,使用碳纤维绑扎转子,可以有效提高转子的机械强度,允许电机在更高的转速下运行,从而提升扭矩密度。此外,优化永磁体的材料和形状,以及合理调整气隙长度等措施,也都有助于提高电机的磁通量利用率,进而实现高扭矩密度。
(二)快速响应特性设计
人形机器人在实际应用中,常常需要根据外界环境的变化和任务需求,迅速做出动作反应,这就对无框力矩电机的快速响应特性提出了极高的要求。从电机整体结构来看,无框设计本身就有助于提高电机的响应速度。由于去除了传统电机的外壳、轴承等部件,无框力矩电机的转动惯量大大降低,使得电机能够更加快速地启动、停止和改变转速。
在转子设计方面,采用轻质材料和优化的结构形状,进一步减小了转子的转动惯量。同时,通过改进电机的控制系统,提高信号处理速度和控制算法的精度,能够使电机从获得指令信号到完成工作状态的时间极短。例如,在一些先进的人形机器人中,无框力矩电机搭配高性能的驱动器和控制器,能够在几毫秒内对控制指令做出响应,实现机器人关节的快速、精准动作。这种快速响应特性,使得人形机器人能够在复杂多变的环境中灵活应对,如在救援场景中,能够迅速避开障碍物,准确地抓取救援物资 。
(三)轻量化与高灵活度设计
轻量化和高灵活度是人形机器人实现高效运动和广泛应用的重要前提,而无框力矩电机在这方面具有天然的优势。无框设计使得电机的体积和重量大幅减少,这不仅有利于减轻人形机器人的整体重量,降低能耗,还能提升机器人的运动灵活性。以特斯拉 Optimus 人形机器人为例,其采用的无框力矩电机在减轻自身重量的同时,为人形机器人的关节提供了更大的活动空间和更灵活的运动范围,使其能够完成如舞蹈、体操等具有高灵活性要求的动作 。
此外,无框力矩电机还具备强大的定制化设计能力。不同的人形机器人在关节尺寸、形状和运动要求上存在差异,无框力矩电机可以根据这些具体需求进行个性化设计。通过调整定子和转子的尺寸、形状,以及绕组的布局等参数,无框力矩电机能够完美适配各种不同尺寸和形态的机器人关节,进一步提升机器人的运动灵活性和整体性能。这种定制化设计能力,使得无框力矩电机在人形机器人领域具有极高的通用性和适应性,能够满足不同应用场景下的多样化需求 。
(四)高精度控制设计
在人形机器人执行各种复杂任务时,对运动精度的要求极高,例如在进行精密装配、书写绘画等任务时,需要机器人的关节能够实现微米级的精确定位和稳定、平滑的运动。无框力矩电机自身具备一系列优良特性,使其能够很好地满足这些高精度控制的需求。它具有低转速、大扭矩、过载能力强、响应快、特性线性度好、力矩波动小等特点,这些特性使得电机在运行过程中能够保持高度的稳定性和精确性 。
为了实现高精度控制,无框力矩电机通常会与高精度编码器、控制器紧密配合。高精度编码器能够实时精确地反馈电机转子的位置和速度信息,控制器则根据这些反馈信息,通过先进的控制算法对电机的运行状态进行精确调整,从而实现对机器人关节位置和运动轨迹的精确控制。在一些高端人形机器人中,通过这种协同工作方式,能够实现机器人关节位置控制精度达到 ±0.01° 以内,重复定位精度可达 ±0.005°,确保机器人在执行任务时能够达到极高的运动精度和稳定性 。
技术难点与突破路径
(一)现存技术难题
在无框力矩电机的发展进程中,诸多技术难题犹如拦路虎,阻碍着其性能的进一步提升和广泛应用。磁路和工艺设计是其核心技术,也是首要面临的挑战。在追求高扭矩密度的过程中,如何在提高转矩密度的同时有效控制温升,成为一大难题。当电机输出高扭矩时,内部的电磁损耗会导致温度急剧上升,过高的温度不仅会影响电机的效率,还可能缩短电机的使用寿命,甚至导致电机故障。例如,在一些早期的无框力矩电机设计中,由于对磁路优化不足,在高负载运行时,电机的温升过高,使得电机的性能大打折扣 。
制造工艺的高精度要求也是一大难点。无框力矩电机对制造和装配工艺的精度要求极高,其关键零部件的加工精度误差需控制在极小范围内,如永磁体的充磁精度、定子绕组的绕制精度等。任何细微的偏差都可能导致电机的性能下降,如转矩波动增大、运行不稳定等。而且,由于无框力矩电机通常需要根据不同的应用场景进行定制化生产,这进一步增加了生产的难度和成本。不同的人形机器人在关节结构、运动需求等方面存在差异,需要无框力矩电机能够灵活适配,这对生产企业的研发能力和生产工艺提出了更高的要求 。
此外,无框力矩电机在散热能力方面也存在不足。由于其结构紧凑,内部空间有限,散热成为一个棘手的问题。在电机运行过程中产生的热量如果不能及时散发出去,会导致电机内部温度升高,影响电机的性能和可靠性。传统的散热方式在无框力矩电机上的应用效果有限,难以满足其在高负载、长时间运行下的散热需求 。
(二)前沿突破思路
面对这些技术难题,科研人员和企业积极探索创新,提出了一系列前沿的突破思路。在磁路设计优化方面,不断借鉴先进的设计理念和方法。例如,德国和美国的一些企业采用的分布式分数槽及碳纤维绑扎技术,通过合理分布定子槽和绕组,减少齿槽转矩,提高了电机的效率和扭矩输出;同时,利用碳纤维绑扎转子,增强了转子的机械强度,允许电机在更高的转速下运行,从而提升了扭矩密度 。
散热技术的突破也是关键。一些企业研发出了新型的散热结构和材料,如液冷散热技术,通过在电机内部设置冷却液通道,将电机产生的热量快速带走,有效降低了电机的温升。还有企业采用新型的散热材料,如高导热系数的陶瓷材料,提高了电机的散热效率 。
在制造工艺升级方面,国内的雷赛智能、卧龙电驱等企业做出了积极的探索。雷赛智能研发成功的第二代 FM2 系列无框电机,采用了新一代磁路优化和灌封工艺技术,实现了 “一低一高一长”(超低温升、超高密度、超长续航)三大优势,加速了人形机器人产业的商业化应用。卧龙电驱通过并购海外知名电机及控制类产品制造企业,融合了国外公司的品牌和技术优势,在无框力矩电机和多种关节模组产品上取得了创新突破,已成功应用于仿生机器人领域 。
定制化与集成化也是重要的发展方向。随着人形机器人应用场景的不断拓展,对无框力矩电机的定制化需求日益增长。企业通过建立灵活的生产体系,能够根据客户的不同需求,快速设计和生产出满足特定要求的无框力矩电机。同时,将无框力矩电机与传感器、驱动器等部件进行集成化设计,减少了系统的体积和重量,提高了系统的可靠性和响应速度 。
市场格局与未来展望
(一)全球市场玩家
目前,全球无框力矩电机市场呈现出多元化的竞争格局,国内外众多企业纷纷布局,各展其长。
在国外,科尔摩根(Kollmorgen)堪称行业的领军者。这家拥有百年运动控制技术积累的企业,是无框力矩电机的发明者。其 TBM 系列无框力矩电机专为机器人设计,采用先进的绕组与材料,解决了传统无框电机 “低速性能差” 的痛点,可在全速度范围内保持高功率、高转矩与高效率,产品与常用谐波减速机高度适配,无需大规模定制,占据着全球高端机器人市场的主导地位 。

来源:科尔摩根官网
TQ - RoboDrive 公司同样实力强劲。该公司隶属于 TQ 集团,依托德国航空航天中心(DLR)技术,专注于高扭矩密度、高动态性能无框力矩电机研发。其无框力矩电机产品采用原创定子转子套件技术(源自国际空间站项目),铜填充系数高、损耗低,适用于人形机器人、医疗手术机器人等高端场景,是欧洲机器人核心部件的重要供应商 。
来源:TQ - RoboDrive官网
而在国内,步科股份表现亮眼。公司成立于 1996 年,于 2020 年上市,是国内无框力矩电机的头部企业。2016 年推出首代无框力矩电机产品,2022 年升级至第三代 FMC 系列。其无框力矩电机产品采用多槽分瓣式结构,提升槽满率、降低温升,转矩密度比传统产品高 20%-30%,且尺寸更小(52mm - 132mm 框架)、重量更轻。第三代 FMC 系列无框力矩电机首创无框灌封工艺,使机身更轻薄、运动更平稳,与中空减速机尺寸匹配,更大的中空内径满足机器人关节过线、布板的多样化需求 。
昊志机电也在无框力矩电机领域积极布局。公司不断加大研发投入,提升产品性能,其无框力矩电机在精度、扭矩输出等方面取得了显著进展,产品广泛应用于工业机器人、数控机床等领域,在国内市场占据了一定的份额 。
雷赛智能推出的第二代超高密度 FM2 系列无框电机,性能超越世界著名 T 公司和 K 公司,意向订单已超过 10 万台。该系列产品在功率密度、响应速度等方面表现出色,为公司在无框力矩电机市场赢得了良好的口碑和市场份额 。
(二)未来发展趋势
展望未来,无框力矩电机在多个方面有着令人期待的发展趋势。在性能指标提升上,研发人员将持续攻克技术难题,进一步提高扭矩密度、降低转动惯量、提升响应速度和控制精度。通过优化磁路设计、采用新型材料和制造工艺,有望实现电机性能的质的飞跃,使人形机器人的动作更加灵活、精准和高效 。
成本降低也是未来发展的关键方向。随着技术的成熟和规模化生产的推进,无框力矩电机的成本将逐渐降低。企业将通过优化生产流程、提高生产效率、加强供应链管理等方式,降低原材料采购成本和制造成本,提高产品的性价比,从而推动人形机器人的普及应用 。
在应用领域拓展方面,无框力矩电机将不仅仅局限于现有的人形机器人、工业自动化等领域,还将向更多新兴领域延伸。在智能家居领域,无框力矩电机可用于智能家电的驱动和控制,实现家电的智能化和人性化操作;在康复医疗领域,可应用于康复机器人,帮助患者进行康复训练,提高康复效果;在教育娱乐领域,可用于智能教育机器人和娱乐机器人,为用户带来更加丰富的体验 。
无框力矩电机的发展对人形机器人产业的影响将是深远的。性能更优、成本更低的无框力矩电机,将为人形机器人的大规模商业化应用奠定坚实基础。它将推动人形机器人在更多领域实现替代人类劳动,提高生产效率和生活质量,成为改变未来社会生产生活方式的重要力量,开启人机协作的新时代 。
总结
无框力矩电机作为人形机器人的核心动力源,以其独特的结构和卓越的性能,在人形机器人的发展进程中扮演着无可替代的关键角色。从高扭矩密度到快速响应,从轻量化与高灵活度到高精度控制,每一项设计要点都紧密围绕着人形机器人的应用需求展开;而在攻克技术难点、突破创新的道路上,科研人员和企业的不懈努力,也为无框力矩电机的性能提升和广泛应用开辟了新的方向。在全球市场的激烈竞争中,国内外企业各施所长,共同推动着无框力矩电机技术的进步和产业的发展。

推荐阅读





×
右键可直接复制图片