
 阅读时间大约8分钟(3185字)
阅读时间大约8分钟(3185字)
2025-11-03 人形机器人的“指尖革命”
来源:人形机器人发布
本文盘点了有望在视触觉技术路线上实现突破的玩家。
作者:Geng 出品:人形机器人发布
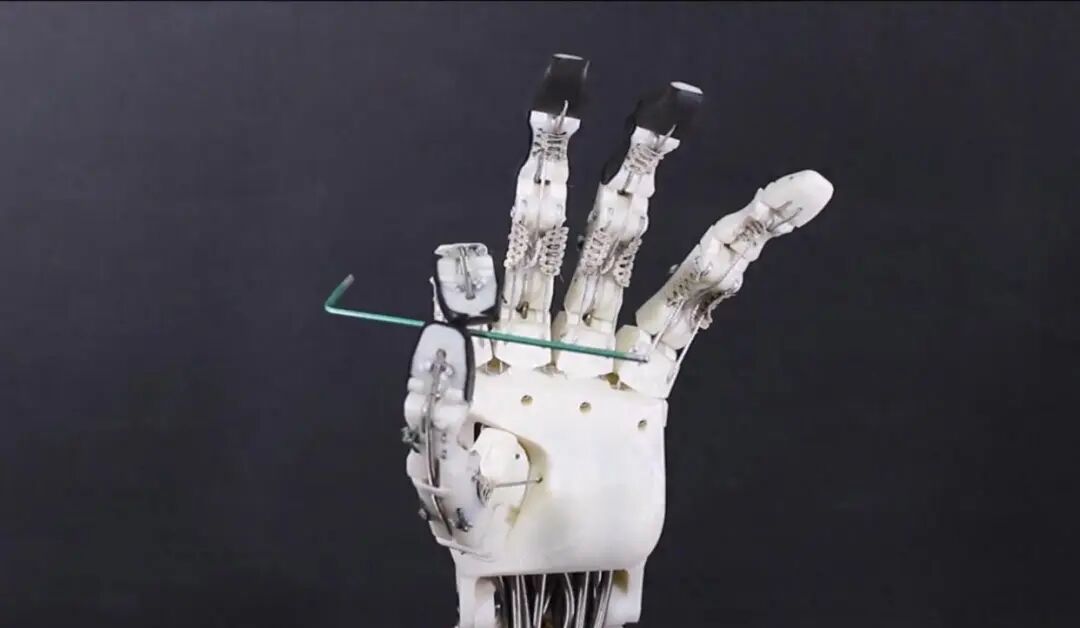
近日,相关消息透露,特斯拉Optimus人形机器人的灵巧手面临着使用寿命不足的问题——在训练分拣快递时,灵巧手寿命只有六个星期,表面柔性电子皮肤会磨损,驱动手指的腱绳容易老化断裂等等。
精密如特斯拉的人形机器人灵巧手仍面临着诸多待解决的难题,而特斯拉为了实现接近人手的操作能力,正积极寻找着解决方案。
微型丝杠、电机、传感器等等核心零部件集成在一双灵巧手中,支撑起灵巧手的感知与操作两大能力,而视触觉传感器作为基于视觉的触觉传感装置,能够满足灵巧手的技术要求,正成为人形机器人实现灵巧操作的关键技术环节之一。
这种通常由柔性材料制成、内部嵌入压力传感元件和成像系统的视触觉传感器,将物理世界的各种参照转化为人形机器人可“读懂”的图像数据,从而能够捕捉物体的纹理、形状、硬度等多种特性,更加接近人手的触觉信息感知维度,打通了人形机器人智能感知的路径。
随着具身智能浪潮袭来,视触觉技术有望成为人形机器人向实用化升级的新标尺。根据国泰海通证券预测,当人形机器人年产量至1亿台,触觉传感器市场或将达到13000亿元,而视触觉传感器作为触觉传感的主流技术路线之一,也将实现新突破。
在这条充满前景的赛道上,国际巨头奠定技术根基,中国企业凭借产学研协同实现弯道超车,产业链各环节玩家加速卡位。本文盘点了有望在视触觉技术路线上实现突破的玩家。
▍Gelsight Inc.
视触觉传感(VBTS)的技术火种,由学术实验室孕育而生。2004年东京大学首次提出视觉触觉融合概念,2009年MIT计算机科学与人工智能实验室的Edward Adelson团队则推出了GelSight视触觉传感器,从而开启了机器感知物理世界的新维度。
MIT团队在2011年通过GelSight传感器将其产业化,Edward Adelson教授作为联合创始人创造了同名公司GelSight Inc.。
Edward Adelson是一位美国神经科学家,现任麻省理工学院约翰和多萝西·威尔逊视觉科学教授,同时也是美国国家科学院和美国艺术与科学院的当选院士主要从事视觉科学、计算机视觉和机器人触觉感知研究。
作为视触觉领域的开创者,GelSight通过弹性体材料和计算机视觉算法实现对物体表面微观结构的精确测量,其核心技术已在机器人操作、工业检测、冰雪竞技等多个领域实现商业化应用。
2022年,GelSight Inc.推出了GelSight Mini机器人触觉传感器,并与Facebook AI Research合作推出了一款触觉传感器DIGIT。
2024年10月,GelSight宣布与Meta AI、Wonik Robotics建立战略合作,联合开发新一代多模态触觉传感器Digit360和仿生机械手Allegro Plexus,并计划2025年量产商业化。这一合作正在为解决视触觉数据与大模型的融合难题寻找出路,有望为具身智能提供底层支撑。

▍戴盟机器人
戴盟机器人致力于研发高分辨率多模态触觉感知、触觉灵巧手软硬件产品及“以人为中心”的穿戴式遥操作数据采集系统,并通过深度融合通用人工智能和机器人技术,研发含视觉、触觉和语言的操作模型(VTLA),为具身智能、智慧物流、智能制造、智慧服务等领域提供创新性解决方案。
戴盟首席科学家与联合创始人王煜教授曾作为首批公派留学生赴美学习,是中国最早从事机器人操作研究的学者之一。回国后,王煜教授与李泽湘教授共同创办了香港科技大学机器人研究院,并担任港科大机器人创始院长,将国际前沿理念与本土科研需求相结合,培养了一批兼具学术深度与产业思维的人才,这也为戴盟机器人的成立埋下了种子。
在2025年斯坦福大学与爱思唯尔联合发布的全球前2%顶尖科学家榜单中,王煜教授同时跻身“终身科学影响力排行榜”与“年度科学影响力排行榜”的全球前 1%,这一成就正是对其学术地位的权威背书。
基于在视触觉传感器、多指灵巧手设计与制造、类人行为学习与泛化、含视觉触觉的感知操作大模型等前沿领域多年的研发积累,孵化于香港科技大学科研团队的戴盟于2023年正式投入运营,并在王煜教授的带领下,走出了一条全新的视触觉传感器技术路线——基于单色光原理的高分辨率视触觉感知技术路线,区别于MIT的GelSight技术方案中常见采用的三色光技术原理。
目前,戴盟机器人已正式发布并量产了贯通机器人“感知-操作-学习”全链路的革命性家族产品,包括全球首款多维高分辨率高频率视触觉传感器DM-Tac W、多维触觉感知五指灵巧手DM-Hand1、便携穿戴式遥操作数据采集系统DM-EXton等,为行业提供颠覆性的具身智能一站式解决方案,加速具身智能产业化进程。
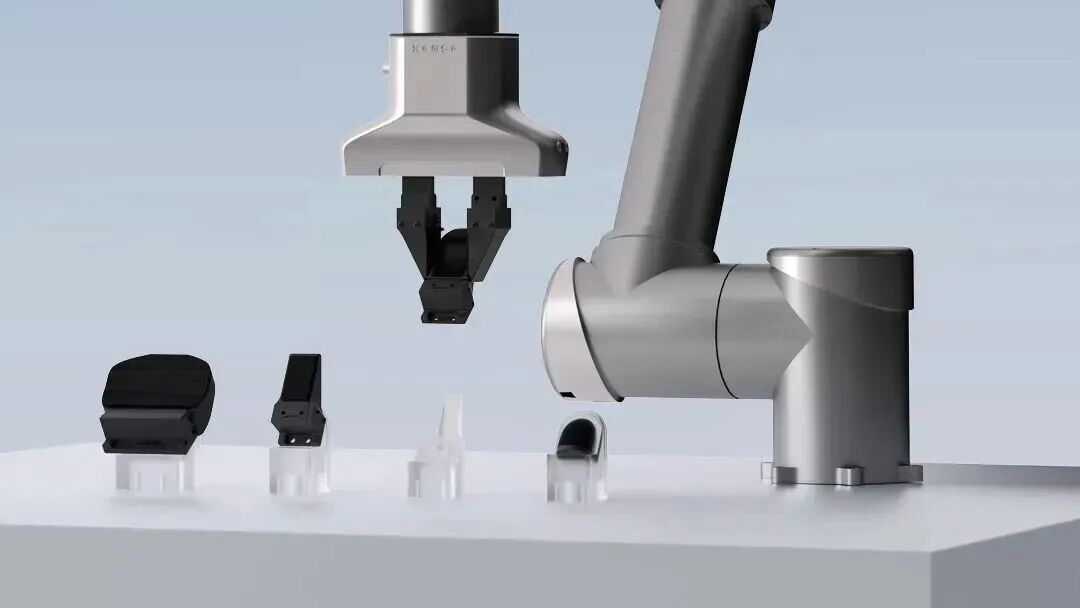
以2025年4月发布的DM-Tac W视触觉传感器为例,该传感器在性能参数上实现了“降维打击”,每平方厘米覆盖4万个感知单元,远超于人手每平方厘米240个感知单元,是当前最密集的阵列式触觉传感器的数百倍。基于超高密度的感知阵列,DM-Tac W可捕捉物体接触时的形貌、纹理、软硬、滑移、按压力、切向力等多种模态信息,让夹爪等末端执行器精准实现人类触觉的细腻与灵巧,助力复杂场景下的精准操控与自适应交互。
最颠覆行业认知的是其耐用性表现。DM-Tac W通过材料改良与结构优化,已完成了500万次的按压测试,这一结果突破了此前行业内对视触觉传感器“精度虽高但耐久度普遍较低”的固有认知,重新定义了视触觉传感器的耐用标准,为其在智能制造、智慧物流等商业应用场景中长期稳定运作提供了保障。
融资方面,现阶段戴盟机器人天使轮累计融资数亿元,创下了触觉感知领域最大天使轮的融资规模,最新一轮亿元级天使++融资发生在今年8月份,由招商局创投领投,东方嘉富、架桥资本跟投。来自资本的密集追捧,证明了资本市场对戴盟技术实力与商业化前景的高度认可。
▍千觉机器人
千觉机器人成立于2024年,专注于机器人精细操作的多模态触觉感知与操作技术研发,在视触觉领域持续进行技术突破与相关探索。
核心团队方面,千觉机器人的创始人马道林教授作为触觉感知领域的杰出科学家,于2009年与2015年分别获北京大学学士与博士学位,2016年至2021年在麻省理工学院从事博士后研究。2021年,马道林加入上海交通大学并创建操作感知与智能实验室。他提出了机器人操作新路径“依靠触觉和接触构建空间感知”,并研发了高分辨率触觉传感器及智能化模组,从而突破了机器人灵巧操作瓶颈。
此外,千觉机器人的核心成员涵盖MIT、北京大学、上海交通大学、伦敦大学学院、悉尼大学等国内外顶尖院校,拥有触觉传感器、触觉感知算法与触觉控制算法等核心技术。
目前,千觉机器人已搭建起从核心硬件到系统平台的全链条技术路径,产品矩阵涵盖全系列触觉传感器、触觉数采系统、触觉仿真器、触觉执行器及触觉控制系统,形成了完整的技术闭环。
以其专为夹爪推出的模态高精度触觉传感器G1-WS为例,该触觉传感器信测量分辨率精度达每平方厘米5万个测量点,突破了传统触觉传感器的感知界限,并能够提供高分辨率三维力觉、动觉、滑觉等多模态感知信息,信息感受密度达到人类手指的800倍,能够敏锐感知细微的物体特征与变形。
凭借领先的实力及卓越的技术创新能力,千觉机器人已获得高瓴领投、孚腾资本、元禾原点等国内外头部风投机构投资,并拿下智元、自变量、银河通用、众擎等具身智能机器人头部企业的订单,还与宁德时代、理想汽车、海尔等企业达成合作。
▍纬钛机器人
纬钛机器人成立于2024年,起源于美国麻省理工学院(MIT)计算机科学与人工智能实验室,致力于让机器人拥有像人一样的触觉和灵巧操作的能力,构建全球领先的视触觉和手眼协同平台,打造更加“心灵手巧”的类人智能机器人,引领下一代机器人灵巧操控的范式革命。
创始团队方面,公司创始人李瑞博士毕业于美国麻省理工学院(MIT),师从美国两院院士Edward Adelson教授,发明了全球首款分辨率超越人类手指的视触觉传感器(高达传统方案的上万倍),是视触觉技术路线的开创者和全球引领者,相关成果已多次荣获全球人工智能顶尖会议“最佳论文奖”,并被公认为目前国际最先进的触觉实现方案,已实现量产使用。
此外,纬钛机器人的研发人员来自MIT、清华、北大、新加坡国立大学等顶尖院校,拥有20年以上全栈开发经验。

2025年4月,该公司完成近亿元天使及天使+轮融资,由小米旗下瀚星创业投资有限公司领投。2025年6月,纬钛机器人在苏州设立子公司,以此来构建沪苏两地研发制造协同体系。2025年7月,公司于世界人工智能大会展示灵巧手技术并获得国务院总理李强现场指导。2025年8月,公司注册资本由71万元增至95万元,新增厦门微光启创股权投资合伙企业等股东,李瑞接任法定代表人。同在8月,公司获小米集团战略投资,以推动触觉传感器与通用机器人产业化。
视触觉技术方面,纬钛机器人推出的视触觉传感器具备超高分辨率,1平方厘米可达数万触觉信息点;可进行多维力测量,无需单独设置,即可自动判断物体的抓取力;可实现柔性物体操作,并具备抗环境干扰能力。
纬钛机器人凭借全球领先的视触觉传感技术,让机器人具备“心灵手巧”的USB插拔和装配能力,助力机器人实现复杂任务灵巧操纵,能够为精密装配、无损抓取、人机协作等场景提供关键解决方案。

推荐阅读




×
右键可直接复制图片