 阅读时间大约7分钟(2735字)
阅读时间大约7分钟(2735字)
2026-01-08 终结Sim2Real困境!GSWorld以3D高斯泼溅实现机器人技能零样本落地!
来源:豆包
如何让机器人在虚拟环境中习得的技能,无缝迁移到真实世界?
作者:李鑫 出品:具身智能大讲堂
在机器人操控领域,一个长期存在的痛点始终困扰着研究者:如何让机器人在虚拟环境中习得的技能,无缝迁移到真实世界?传统方案要么依赖成本高昂的真实机器人数据采集,要么受限于仿真环境与现实的巨大差异,导致sim2real的迁移效果大打折扣。

来自加州大学圣地亚哥分校、加州大学洛杉矶分校和Meta的研究团队,推出了一款名为GSWorld的闭环照片级真实感仿真套件。这款融合3D高斯泼溅(3DGS)与物理引擎的仿真工具,构建了“现实-仿真-现实”的完整闭环,让机器人策略的训练、评估、故障诊断和优化无需依赖真实机器人即可高效完成,成功打通了虚拟与现实之间的技术壁垒。
1►核心技术支柱:GSDF资产格式与高效重建流程
GSWorld的强大能力,源于其创新的资产格式和 streamlined 的重建流程。研究团队提出了一种名为GSDF(Gaussian Scene Description File)的新型资产格式,将网格上的高斯表示(Gaussian-on-Mesh)与机器人URDF及其他物体信息深度融合,既保留了3D高斯泼溅的照片级渲染能力,又兼容了物理引擎所需的碰撞检测和物理属性。
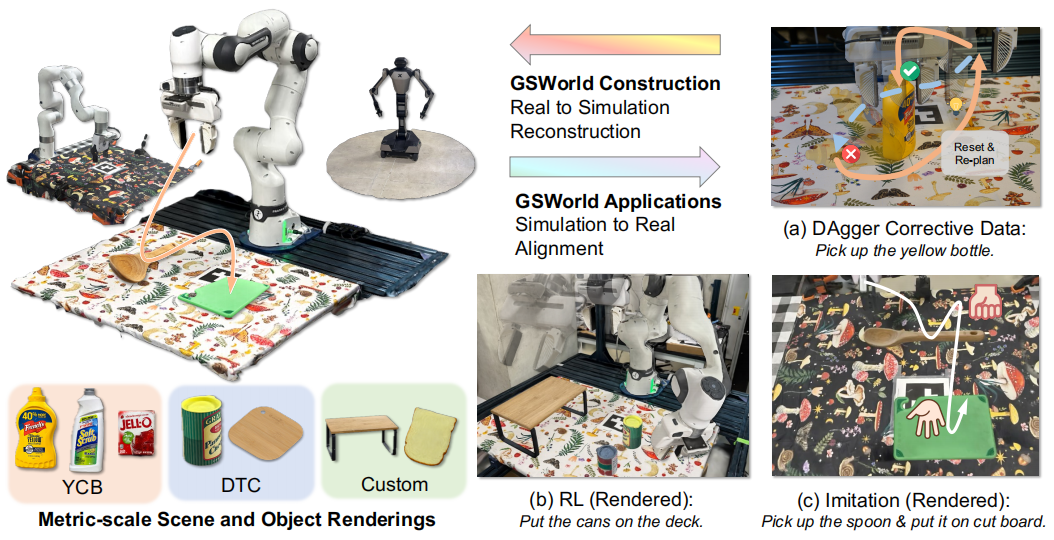
GSWorld 借助 3D 高斯泼溅(3DGS)重建技术渲染照片级真实感机器人场景,支持在仿真环境中采用多种政策学习方案,并实现零样本仿真到现实(sim2real)迁移。此外,GSWorld 还可应用于政策视觉基准测试,以及用于数据采集的虚拟远程操控场景。
这种资产格式的优势在重建流程中得到充分体现。与传统方法依赖手动对齐、仅适用于单一场景不同,GSWorld的重建流程实现了高度自动化:
首先,数据采集阶段结合了机器人传感器(腕部相机、第三人称相机)和手机相机,同时记录机器人关节姿态,确保多视角数据的完整性;其次,通过在桌面放置ArUco标记物,自动解决了尺度模糊问题,无需手动调整即可获得 metric 尺度的场景表示,同时还能辅助识别支撑面和重力方向;在机器人与桌面对齐环节,通过ICP算法计算刚性变换,由于尺度已固定,相比传统方法减少了自由度,提高了对齐精度;对于可移动物体,不仅整合了DTC、YCB等现有大规模数据集,还支持自定义物体的重建,通过2D高斯泼溅获取几何结构,可选通过非模态重建或3D物体生成技术补全未观测区域。
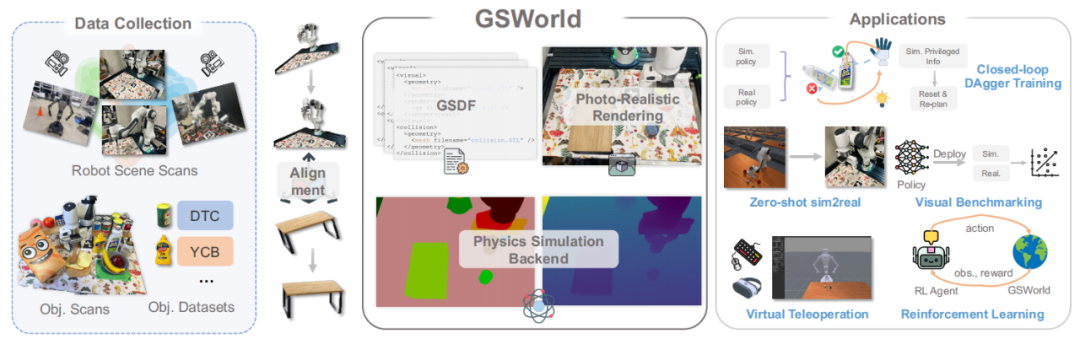
GSWorld 在现有仿真器基础上提供了一个接口,用于渲染照片级真实感资产。研究团队的 GSDF 资产可与现有仿真器兼容,支持采用标准格式进行视觉渲染(如深度图、分割图)及物理碰撞计算。GSWorld 为仿真器搭配了一层渲染包装层,能让 RGB 渲染达到照片级真实感,进而支持多种领域随机化场景及各类应用场景。
基于这一流程,研究团队构建了包含3种机器人形态(单臂、双臂操控)和40余种物体的GSDF数据库,为后续的多样化应用提供了坚实基础。值得注意的是,GSWorld并非要替代现有仿真器,而是通过渲染包装层的形式,为现有仿真器提供照片级RGB渲染能力,同时兼容深度图、分割图等标准渲染输出,以及物理碰撞计算。
2►五大核心应用:从策略训练到基准测试的全覆盖
凭借照片级真实感渲染和原生动作空间控制的双重优势,GSWorld解锁了五大核心应用场景,全面覆盖机器人策略开发的全流程。
1. 零样本sim2real模仿学习与强化学习
模仿学习(IL)和强化学习(RL)是机器人技能习得的两大核心范式,但均受限于sim2real差距。GSWorld通过3D高斯泼溅生成的照片级观测,大幅缩小了视觉差距。在模仿学习中,利用运动规划或远程操控收集的仿真数据训练的策略,可直接部署到重建的真实场景中;在强化学习中,GSWorld优化了并行环境实现,仅对机器人和物体等运动部件的3D高斯点进行并行处理,其余部分缓存复用,单GPU即可支持大规模并行训练,加速收敛。实验显示,基于GSWorld训练的强化学习策略,在"抓取香蕉"和"整理桌面"任务中,真实世界成功率分别达到30%和20%,而基线方法ManiSkill仅为0%和5%。
2. 闭环DAgger训练:持续优化策略性能
DAgger(数据集聚合)是解决策略部署后故障适应的有效方法,但传统方式难以复现故障场景并收集纠正数据。GSWorld的数字孪生体让这一过程变得高效:在仿真中复现真实世界的策略故障,随机采样仍可完成任务的恢复状态,通过运动规划生成纠正数据,迭代优化策略。

仿真环境中的DAgger数据采集
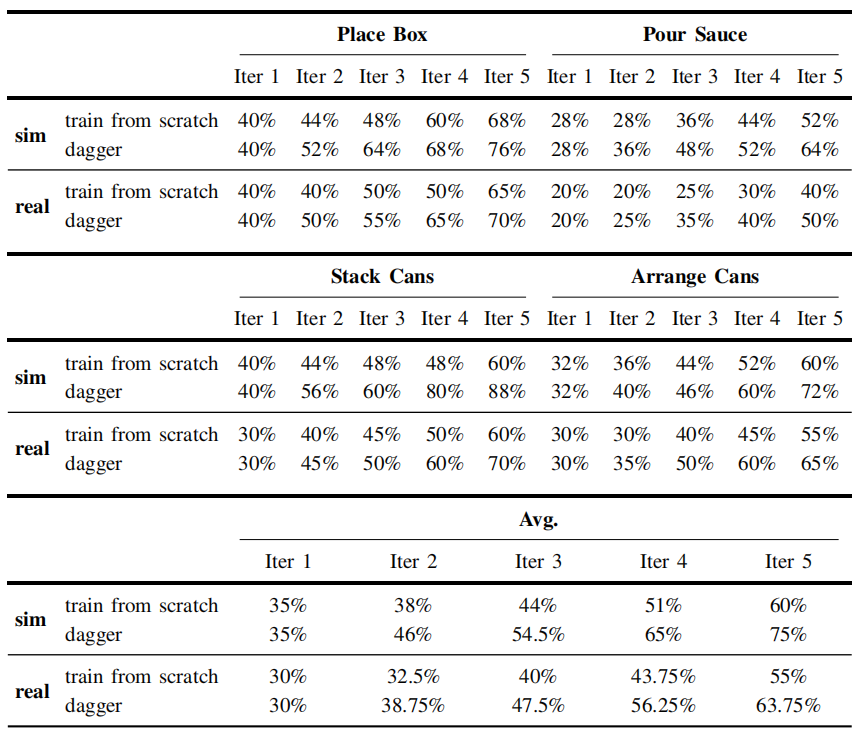
实验表明,在FR3机器人的四项任务中,DAgger迭代训练相比从头训练,性能显著提升,其中"堆叠罐子"任务的真实世界成功率从60%提升至70%,"整理罐子"任务从55%提升至65%。
更重要的是,这一流程同样适用于基于真实数据训练的策略,通过"真实-仿真-真实"的闭环,持续提升部署后的策略性能。
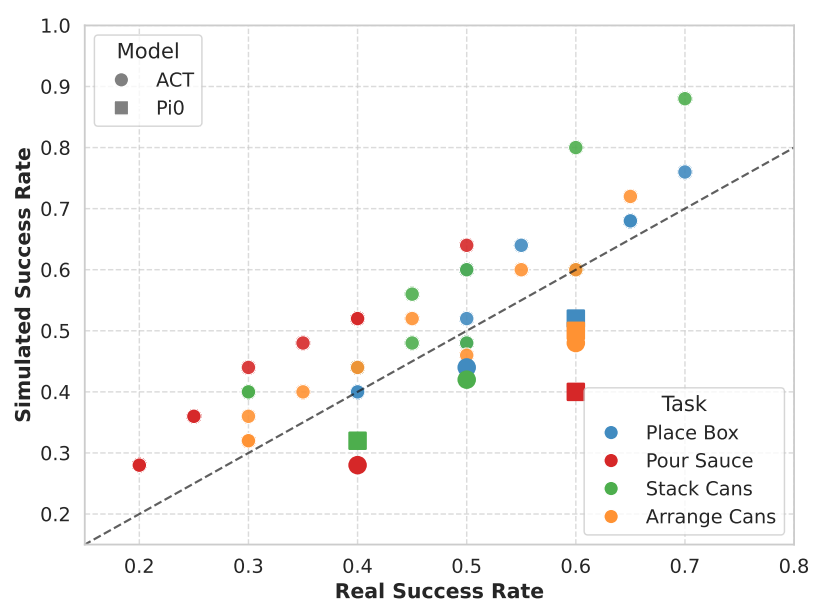
3. 可复现的视觉基准测试
当前机器人策略评估面临着环境不一致的难题:不同场景、光照、相机参数导致的性能差异,往往掩盖了算法本身的进步。GSWorld提供了标准化的基准测试框架:统一的GSDF资产、固定的相机内参/外参、一致的光照和材料属性,以及标准化的动作语义,确保不同机器人、场景、任务间的" apples-to-apples "比较。实验验证了仿真与真实世界性能的强相关性,无论是ACT还是Pi0架构,仿真中的成功率都能可靠预测真实世界表现,为算法迭代提供了精准的评估依据。
4. 虚拟远程操控数据采集
远程操控是获取高质量机器人数据的重要方式,但真实远程操控成本高、难度大。GSWorld支持通过键盘鼠标在仿真中进行虚拟远程操控,生成照片级真实感视频和数据。
研究团队利用Galaxea R1双臂机器人验证了这一功能,通过键盘操控即可收集复杂的双臂协作数据,大幅降低了数据采集的门槛和成本,为大规模策略训练提供了高效的数据来源。
5. 跨形态机器人策略适配
随着通用机器人策略的发展,跨不同硬件形态的适配能力变得至关重要,但缺乏标准化的评估环境。GSWorld支持多种机器人形态,包括FR3(带UMI夹爪)、xArm6(平行夹爪)和Galaxea R1(双臂),并提供多样化的交互物体和任务设计。研究团队在三种机器人上设计了七项任务,涵盖拾取、放置、倾倒、堆叠等多种核心操控技能,为跨形态策略的训练和评估提供了统一平台。
3►实验验证:数据驱动的性能背书
为全面验证GSWorld的有效性,研究团队设计了多维度实验,核心结论如下:
在零样本sim2real迁移方面,仅使用仿真数据训练的策略,在真实世界中展现出良好的成功率,证明GSWorld有效弥合了视觉和动作空间差距;在闭环策略优化方面,DAgger迭代训练在所有任务中均实现持续性能提升,验证了故障复现和纠正数据采集的有效性;在基准测试相关性方面,仿真与真实世界性能的强相关性,确立了其作为评估工具的可靠性;在虚拟远程操控和强化学习方面,也通过对比实验验证了其数据采集效率和视觉差距缩小效果。
值得注意的是,GSWorld具有策略无关性,实验中采用的ACT和Pi0两种不同架构的策略,均能借助GSWorld实现性能提升,表明其适配各类主流机器人策略框架。同时,研究团队公开了代码库和使用示例,GSWorld可通过一行代码封装现有gym环境,快速集成到现有机器人策略开发流程中。
4►结语与未来:
GSWorld的核心突破在于,首次将3D高斯泼溅的照片级渲染能力与物理引擎的精准碰撞计算相结合,构建了"现实-仿真-现实"的完整闭环。这一创新不仅解决了长期困扰机器人领域的sim2real差距问题,更重塑了机器人策略开发的流程:从数据采集、策略训练、故障诊断到性能评估,均可在仿真环境中高效完成,大幅减少对真实机器人的依赖,降低研发成本,加速迭代周期。
与现有基于高斯泼溅的仿真器相比,GSWorld突破了单一场景限制,提供了标准化的资产格式和自动化重建流程,支持跨形态机器人基准测试和部署导向的策略数据采集。其五大核心应用场景,全面覆盖了机器人策略开发的关键环节,为通用机器人技能的习得提供了强有力的工具。未来,随着3D重建技术和物理引擎的持续进步,GSWorld有望进一步提升场景重建的效率和物理模拟的精度,支持更复杂的操控任务和更多样的机器人形态。
论文地址:https://arxiv.org/pdf/2510.20813
项目地址:https://3dgsworld.github.io/

推荐阅读




×
右键可直接复制图片