
 阅读时间大约7分钟(2676字)
阅读时间大约7分钟(2676字)
2026-01-09 机器人专家:波士顿动力新版Atlas是个半成品!
来源:波士顿动力
新设计在美学上极其丑陋,在机械结构上充满了令人费解的选择?
作者:沙克 出品:人形机器人洞察研究
主持人与机器人专家 Scott Walter 对波士顿动力(Boston Dynamics)最新发布的机器人(新版 Atlas)进行了激烈的吐槽和技术拆解。他们认为新设计在美学上极其丑陋,在机械结构上充满了令人费解的选择(如布线方式、关节对齐、致动器配置),且演示的应用场景(搬运汽车部件)缺乏逻辑,因为该领域早已被传统工业臂自动化。尽管波士顿动力声称其易于维修,但专家认为这反向暗示了其可靠性存疑。此外,视频后半部分 Scott 分享了他在欧洲参观 Manus 公司获得的高精度数据手套的见闻。
整体而言,视频通过幽默犀利的口吻,探讨了当前人形机器人研发中审美、工程逻辑与实用主义之间的矛盾。
核心要点:本期视频是一场针对波士顿动力新版机器人的“技术吐槽大会”。Scott Walter 博士从专业角度严厉批评了新产品在美学设计、机械结构强度(如悬臂关节)以及商业落地逻辑(重复造轮子)上的全方位倒退,认为其甚至不如旧版液压 Atlas 像艺术品。Scott Walter 认为,波士顿动力从曾经代表机械工程巅峰的液压 Atlas,转向了一个看似廉价、结构业余且缺乏常识的新设计。这种为了降低成本而牺牲机械合理性的做法,不仅没有展现出超越 Optimus 等竞品的实力,反而让人觉得这是一家迷失方向的公司,正在为了迎合 Google DeepMind 的合作而推出半成品。
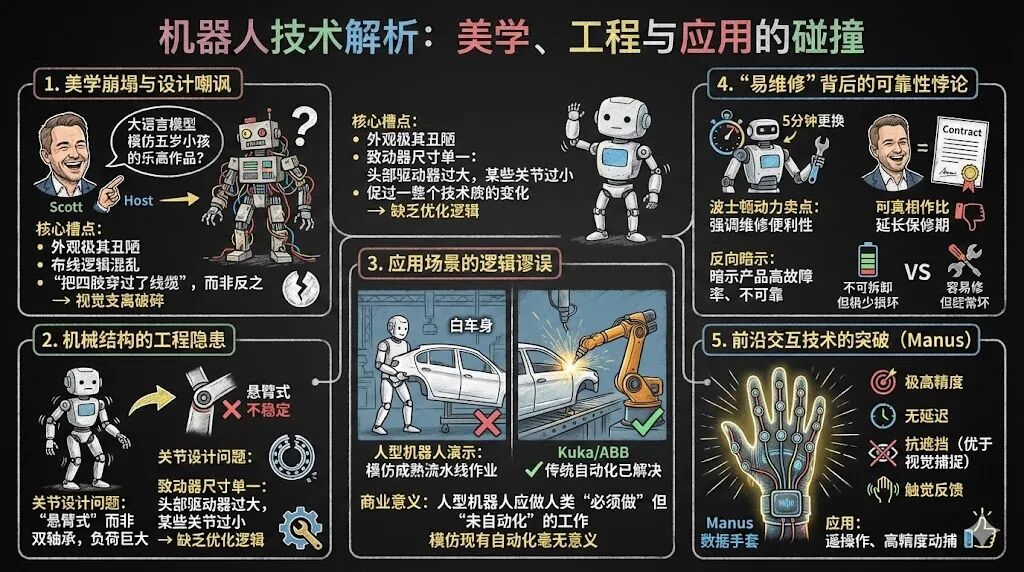
美学崩塌与设计嘲讽:Scott 和主持人对新机器人的第一反应是大笑,认为其外观极其丑陋,像是“大语言模型模仿五岁小孩用乐高拼凑的作品”。Scott 讽刺其布线逻辑极为混乱,看起来不是将线缆穿过四肢,而是“把四肢穿过了线缆”,导致整体视觉效果支离破碎。
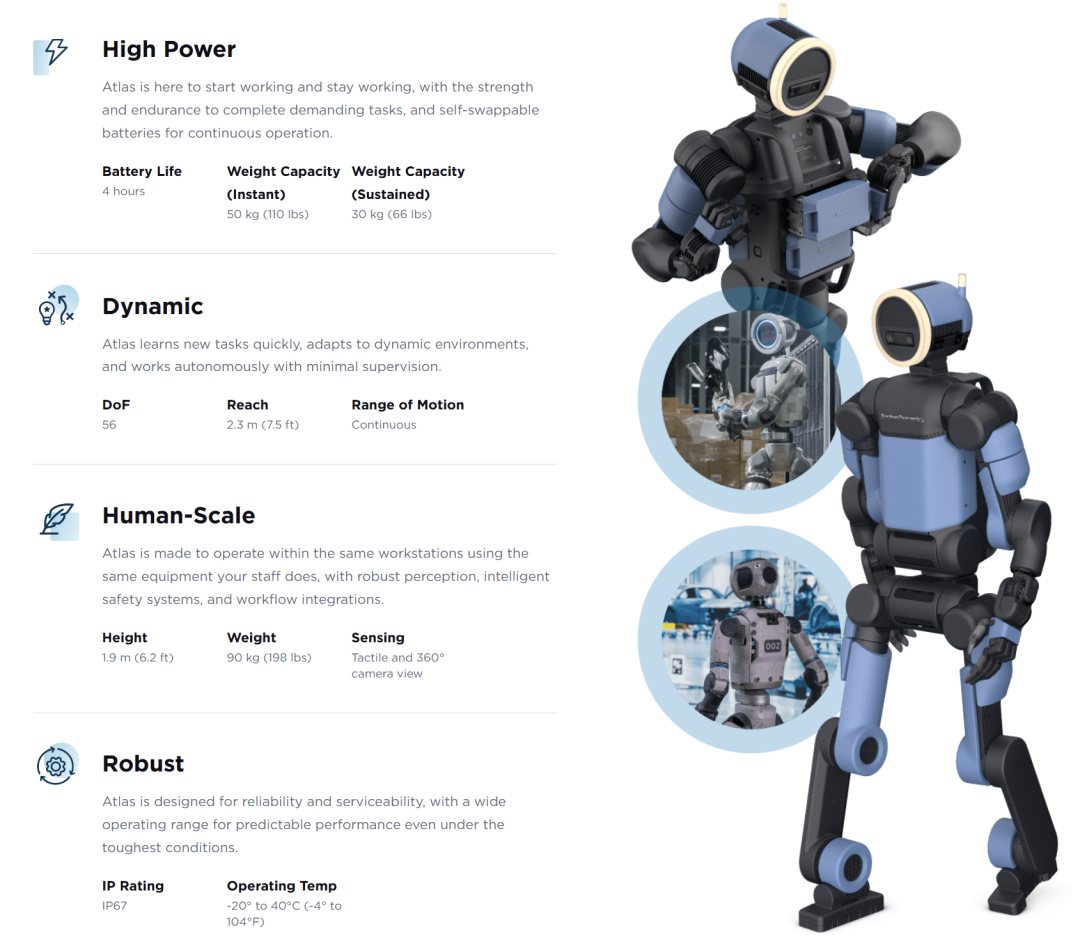
机械结构的工程隐患:专家质疑了机器人的硬件选择。虽然身高约1.88米、重200磅,但其关节采用了“悬臂式”(cantilevered)设计而非更稳固的双轴承支撑,这会让轴承承受巨大负荷,易导致损坏。此外,全身仅使用两种尺寸的致动器(Actuators),导致头部驱动器过大而某些关节驱动器可能过小,缺乏工程优化的逻辑,。应用场景的逻辑谬误:针对演示视频中机器人搬运“白车身”(汽车部件)的场景,Scott 指出这是传统自动化(如 Kuka 和 ABB 机械臂)早已完美解决的领域。他认为人型机器人应展示人类必须做但尚未自动化的工作,去模仿已成熟的流水线作业毫无商业意义。“易维修”背后的可靠性悖论:波士顿动力宣传其关节可在5分钟内更换,以此作为卖点。但 Scott 将其比作推销“延长保修期”,认为过分强调维修便利性反向暗示了产品的高故障率和不可靠。他指出消费者需要的是像现代手机电池那样“不可拆卸但极少损坏”的产品,而非容易修但经常坏的机器。前沿交互技术的突破(Manus):与对波士顿动力的批评相反,Scott 高度评价了他在欧洲参观的 Manus 公司的数据手套。该设备通过内建传感器实现了极高的精度、无延迟且抗遮挡(优于视觉捕捉系统),并具备触觉反馈功能,在遥操作和高精度动捕领域表现出色。
设计过于怪异
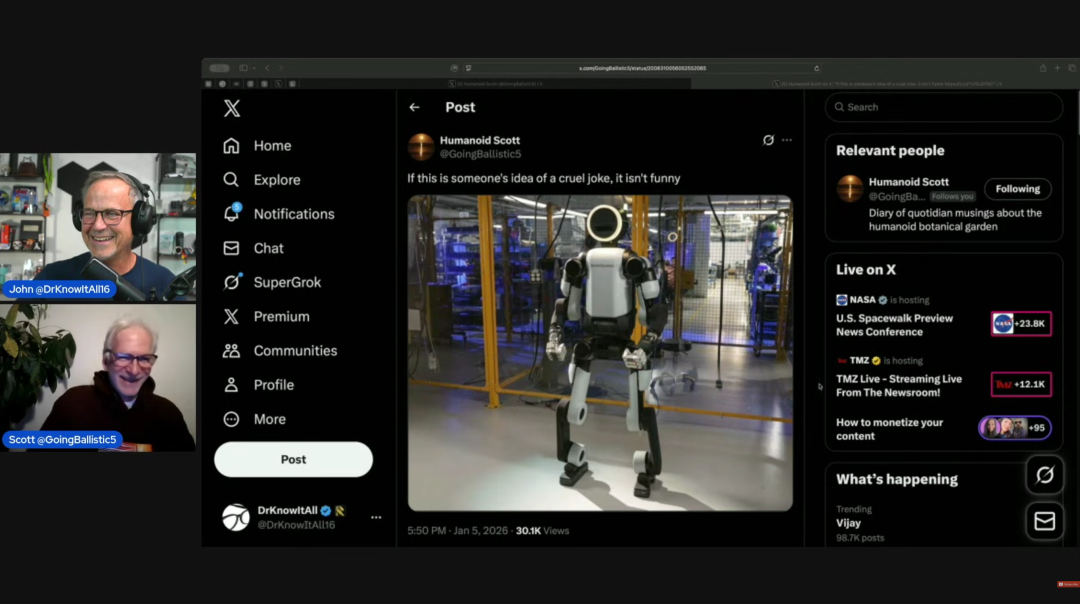
视频开场,身处苏黎世的 Scott Walter 与主持人讨论了刚刚在 LinkedIn 上看到的波士顿动力新机器人公告。第一反应是怀疑:Scott 表示他在 LinkedIn 上看到图片时,第一反应以为是谁在恶搞(trolling),甚至以为是有人让 Grock(AI模型)给 Atlas 穿上了比基尼,或者是把乐高积木随意拼凑在了一起。设计美学崩塌:Scott 直言“笑是最好的礼物”,因为波士顿动力这次真的“搞砸了”(nailed it,此处为反语)。他形容这个设计看起来就像是你让一个大型语言模型去模仿“五岁小孩设计的机器人”长什么样。
设计师的回应:波士顿动力的设计师声称这是“为工厂车间开发的,而不是为喜剧俱乐部开发的”。Scott 幽默地反驳道:“不,你们在两方面都成功了。”因为这个设计既让人发笑,又是为了工厂。令人困惑的布线逻辑:Scott 提出了一个讽刺性的观察,他认为工程师可能觉得很难将线缆穿过四肢(route the cabling through the limbs),所以他们决定反其道而行之,把四肢穿过了线缆(route the limbs through the cabling)。这反映了其外观结构极其不协调。Google 的影子:这次发布是与 Google DeepMind 的公告结合进行的。这让人想起十年前 Google 曾拥有波士顿动力,现在他们似乎又“复合”了,就像为了回到前任身边不惜做任何疯狂的事情。
机械结构深度拆解:令人费解的工程选择
Scott 深入分析了该机器人的具体硬件细节,认为许多设计违反了常规工程逻辑。体型数据:该机器人身高 6英尺2英寸(约 1.88米),体重 200磅(约 90公斤)。
关节与致动器(Actuators)布局:之字形排列:四肢的排列呈现出奇怪的“之字形”(zigzag),肘部完全不以同心圆方式(non-concentric)运动,让人看不懂它的旋转轨道。致动器尺寸:他们似乎只使用了两种不同类型的旋转致动器(大号和小号)。
令人费解的是,头部装了一个巨大的致动器来驱动那个很轻的头,而在这个本不需要大扭矩的地方浪费了配置。缺乏过渡:由于只用两种尺寸,导致某些部位致动器过大,某些部位可能过小。Scott 指出,如果只是制造 10 台原型机,这样做是为了省事;但如果要生产一百万台,这种忽视 SKU(库存单位)优化的做法毫无逻辑。
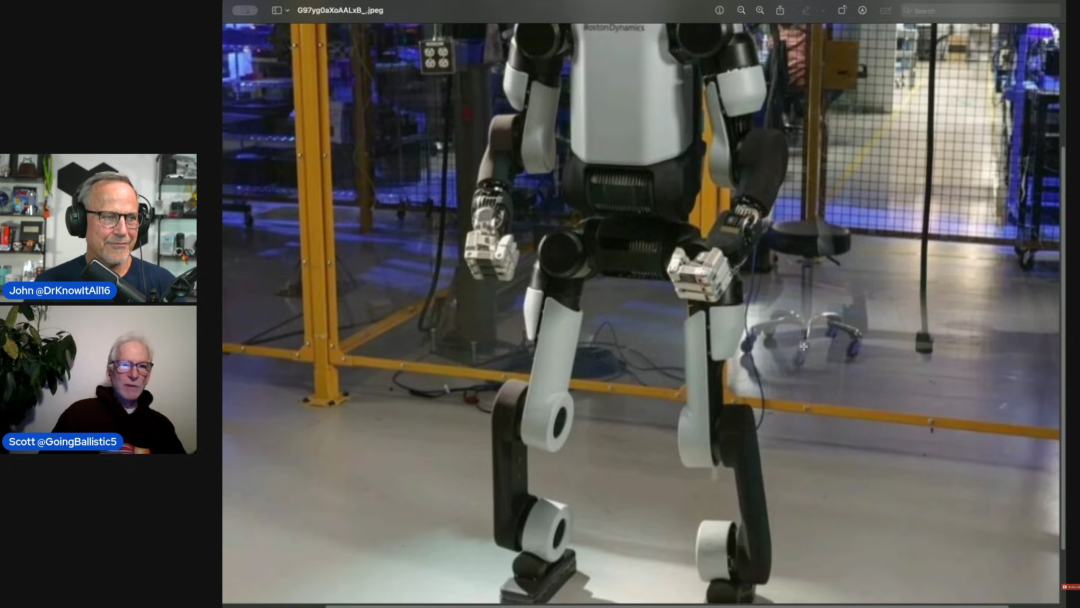
结构强度隐患:悬臂轴(Cantilevered axis):机器人的关节设计采用了悬臂式(类似单边支撑),而不是常见的 Y型叉(Y fork)或双轴承支撑(double bearing)。考虑到它自身 200磅加上声称的重负载,这会导致交叉滚子轴承(cross roller bearings)承受巨大的扭矩和负荷,极易损坏,。脚部设计:脚看起来像两层砖头叠在一起,或者某种日本厚底凉鞋,且没有任何脚趾的灵活性。

手部设计缺陷:手指是全金属的,没有任何橡胶化处理。Scott 强调,金属对金属(metal on metal)通常不是良好的抓取表面,通常需要“软对硬”的接触面才能有效抓取。这种设计被评价为“毫无优雅可言”
应用场景与维修性迷思——为何要造这个?
Scott 对波士顿动力展示的演示视频及其背后的商业逻辑提出了严厉批评。演示内容的荒谬性:演示视频展示了机器人搬运“白车身”(Body in white,指已完成焊接但未涂装的汽车车身)部件。自动化常识:Scott 指出,在现代汽车工厂中,从来没有“人”会去抓取这些部件并搬运。这早已被 Kuka 和 ABB 等公司的六轴工业机器人完全自动化了。
人型机器人的定位:如果你想说服人们在工厂需要人型机器人,你应该展示那些目前无法自动化、必须由人来完成的工作。去展示一个早已解决的自动化流程是毫无意义的。关于“易于维修”的营销话术:波士顿动力宣称该机器人的关节或肢体可以在 5 分钟内更换,以此作为“易于维修”的卖点。反向解读:Scott 将其比作汽车推销员向你推销“延长保修期”(extended warranty)。当厂商过分强调维修有多容易时,往往意味着这个产品非常容易坏。
消费者想要的是“不坏”的产品,而不是“容易修”的产品,。对比旧版:Scott 回忆起原本的 Atlas(旧版液压版)是一件“艺术品”,虽然过度工程化且昂贵,但很美。而新版机器人就像电影《本杰明·巴顿奇事》一样倒着长——这个声称更成熟的产品反而看起来像是一个初学者的第一次尝试,既丑陋又廉价。
技术前沿见闻——Manus 数据手套的突破
在吐槽完波士顿动力后,Scott 分享了他近期在欧洲(荷兰/苏黎世周边)考察机器人公司的见闻,重点介绍了一家名为 Manus 的公司。Manus 数据手套:这是一家已经研发了10年的公司。虽然 VR 数据手套的概念早在 35 年前就有了,但 Manus 现在的产品达到了极高的精度和可靠性。
核心技术优势:高精度与无延迟:手套能非常精准地捕捉手指位置,且没有延迟,这对于遥操作(tele-robotics)至关重要。
抗遮挡能力:相比于视觉/相机系统(一旦视线被遮挡就失效),这种手套内置传感器,完全不受遮挡影响。
触觉反馈(Haptic feedback):手套指尖具备震动功能,用于模拟接触物体的感觉。
六自由度(6 Degrees of Freedom):它能精准追踪指尖的位置和方向,不需要外部单元,所有计算都在手套上完成,甚至可以基于手部模型反推逆运动学(inverse kinematic model)数据。
应用领域:除了机器人遥操作,还广泛用于医疗(评估手部运动)和好莱坞动画制作(如 Maya 3D 动画接口)。

推荐阅读





×
右键可直接复制图片