
 阅读时间大约6分钟(2152字)
阅读时间大约6分钟(2152字)
2026-02-06 连滑板都会了?宇树G1解锁“侧身压弯”神技
来源:人形机器人洞察研究
来直观感受一下 HUSKY 系统的能力。
作者:沙克 出品:人形机器人洞察研究
最近,人形机器人领域又迎来了一个令人兴奋的“破圈”时刻。我们习惯了看机器人搬箱子、甚至做后空翻,但你见过机器人像滑板少年一样,单脚蹬地、侧身压弯、在滑板上行云流水地滑行吗?
上海交通大学、中国电信人工智能研究院(TeleAI)、中国科学技术大学、上海科技大学和香港大学的研究团队联合发表了一篇名为《HUSKY:基于物理感知全身控制的人形滑板系统》的论文。他们提出了一种全新的框架,让Unitree G1人形机器人不仅学会了滑滑板,还掌握了人类滑板的核心精髓——“压弯转向”(Lean-to-Steer)。
滑板,对于人类初学者来说都是一项极具挑战的运动,通过单脚蹬地加速,双脚站立保持平衡,再通过身体重心的偏移来控制滑板转向。对于机器人而言,这更是一个典型的非完整约束(non-holonomic constraints)与欠驱动(underactuated)系统难题。
传统的控制方法往往假设环境是静态的,或者将滑板简化为一个简单的轮式底座,忽略了滑板本身复杂的物理特性(如桥的倾斜与转向的耦合)。
而这篇论文提出的 HUSKY 框架,核心在于“物理感知(Physics-Aware)”—它真正理解了滑板的机械原理,并将其融入到了全身控制中。
首先,让我们通过一张图来直观感受一下 HUSKY 系统的能力。

这张图展示了 HUSKY 框架在真实世界中的表现:
(a) 机器人完成了完整的滑板动作:从单脚蹬地(pushing)获得动力,到收脚上板,再到调整姿态。(b) 在不同的户外场景和不同的滑板上都能稳定运行。(c) 室内环境的测试。(d)关键点: 展示了“压板转向”(Lean-to-steer)行为,机器人通过倾斜身体来控制滑板转弯,这和人类的逻辑一致。* (e) 抗干扰能力,即便受到外力推搡也能保持平衡。滑板不是一个死板的平板车。当你踩压滑板的一侧(Board Tilt)时,地盘下的支架(Trucks)会发生旋转,从而带动轮子转向。这种板面倾角与转向角之间的耦合关系,是滑板运动的精髓。
研究团队首先建立了精确的滑板运动学模型。

研究人员对滑板结构进行了数学建模(图2):左侧展示了滑板的几何参数,包括轴距(L)、主销后倾角(Rake Angle, λ)等。
右侧展示了最为核心的“压弯-转向”机制。* 公式 (1)tanσ = tanλ sinγ被推导出来,明确了板面倾斜角(γ)与轮子转向角(σ)之间的数学关系。这是机器人能够精准走线的理论基础 。
此外,为了让大家更理解这个几何推导过程,论文在附录中还提供了详细的推导图示。

这是一个深度的几何拆解,展示了滑板支架(Truck)如何将板面的翻滚运动(Roll)转化为轮轴的偏航运动(Yaw),从而实现转向。
教机器人滑滑板,不能“眉毛胡子一把抓”。HUSKY 将整个滑板过程定义为一个混合动力系统,通过有限状态机将其划分为三个周期性阶段:蹬地(Pushing)、过渡(Transition) 和 滑行转向(Steering)。

这是 HUSKY 的核心架构图,分为三个部分:
(a) 左侧: 展示了人-板系统的物理耦合关系。(b) 右侧: 详细展示了三个阶段的控制策略:1. AMP for Pushing Style (绿色区域): 在蹬地阶段,引入了“对抗动作先验”(AMP),利用人类滑板的动作数据训练判别器,让机器人的蹬地动作既有效又像人,而不是机械地瞎踢。2. Trajectory Planning Transition (粉色区域): 过渡阶段是最危险的。系统使用了贝塞尔曲线(Bézier curve)和球面线性插值(SLERP)来规划上板和下板的轨迹,确保平滑切换。3. Physics-Guided Steering (蓝色区域): 在滑行阶段,利用图2推导出的物理公式,计算出目标航向所需的板面倾角,引导机器人做出正确的倾斜动作。理论很丰满,现实骨感吗?研究团队进行了大量的对比实验。转向能力的提升。如果没有物理模型的指导,机器人能学会转弯吗?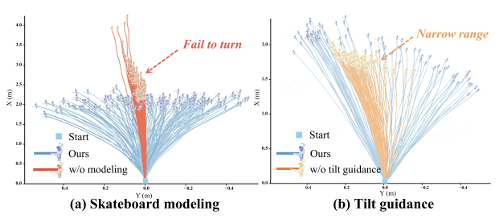 (a) 是否建模的区别: 红线显示,如果忽略滑板的物理耦合(w/o modeling),滑板只能走直线,无法转向;蓝线(Ours)则展示了丰富的转向能力 。(b) 是否有倾斜引导的区别: 即便有了模型,如果单纯靠强化学习自己摸索(橙色区域),机器人能覆盖的转向范围很窄。而引入物理引导的倾斜策略后(蓝色区域),机器人的转向范围和精度都大幅提升。训练效率与动作质量。下图的左图是回合长度,右图是转向时的接触奖励。
(a) 是否建模的区别: 红线显示,如果忽略滑板的物理耦合(w/o modeling),滑板只能走直线,无法转向;蓝线(Ours)则展示了丰富的转向能力 。(b) 是否有倾斜引导的区别: 即便有了模型,如果单纯靠强化学习自己摸索(橙色区域),机器人能覆盖的转向范围很窄。而引入物理引导的倾斜策略后(蓝色区域),机器人的转向范围和精度都大幅提升。训练效率与动作质量。下图的左图是回合长度,右图是转向时的接触奖励。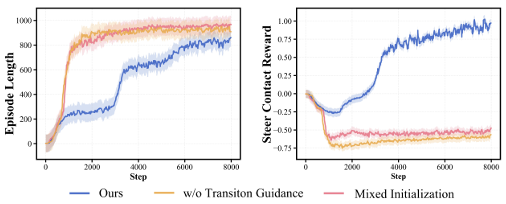 蓝线 (Ours) 迅速上升并稳定,说明机器人很快学会了稳定的滑行。* 黄线 (无过渡引导) 和 粉线 (混合初始化) 的表现都很差,说明如果没有专门设计的“过渡阶段”轨迹规划,机器人很难学会正确的上板动作,容易卡在局部最优解(比如一直蹬地不上板)。
蓝线 (Ours) 迅速上升并稳定,说明机器人很快学会了稳定的滑行。* 黄线 (无过渡引导) 和 粉线 (混合初始化) 的表现都很差,说明如果没有专门设计的“过渡阶段”轨迹规划,机器人很难学会正确的上板动作,容易卡在局部最优解(比如一直蹬地不上板)。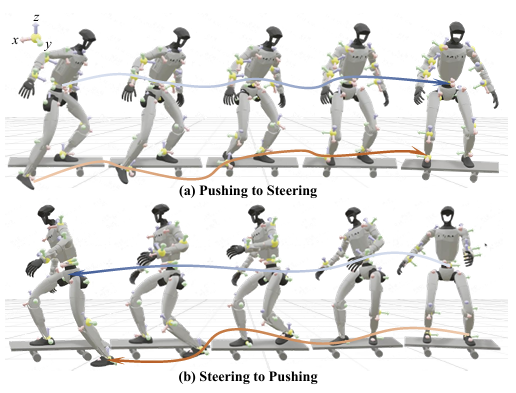 上图展示了极其丝滑的动作序列。(a) 从蹬地到上板,(b) 从滑行到下板蹬地。可以看到机器人的重心转移和脚部落点都非常自然且连贯 。现实世界的挑战与细节。在真机测试中,细节决定成败。研究人员给出了机器人脚部动作的特写。
上图展示了极其丝滑的动作序列。(a) 从蹬地到上板,(b) 从滑行到下板蹬地。可以看到机器人的重心转移和脚部落点都非常自然且连贯 。现实世界的挑战与细节。在真机测试中,细节决定成败。研究人员给出了机器人脚部动作的特写。 上图展示了机器人蹬地后,将脚抬起并准确落在滑板上的过程,随后旋转身体调整姿态。这与人类滑板的逻辑完全一致 。同时,为了保证安全和训练效果,研究人员在仿真环境中设置了精确的碰撞检测区域。
上图展示了机器人蹬地后,将脚抬起并准确落在滑板上的过程,随后旋转身体调整姿态。这与人类滑板的逻辑完全一致 。同时,为了保证安全和训练效果,研究人员在仿真环境中设置了精确的碰撞检测区域。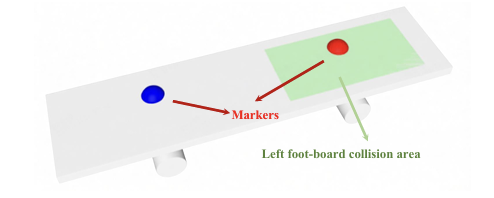 上图红色和蓝色球体代表理想的落脚点,浅绿色区域是碰撞检测区。这不仅引导机器人踩在正确的位置(桥的正上方),还防止了穿模等物理模拟错误 。
上图红色和蓝色球体代表理想的落脚点,浅绿色区域是碰撞检测区。这不仅引导机器人踩在正确的位置(桥的正上方),还防止了穿模等物理模拟错误 。
“板感”的重要性:系统辨识。玩过滑板的朋友都知道,板子的软硬(桥的松紧)对滑行影响巨大。机器人也是如此。
这是一个非常有趣的失败案例分析,强调了 Sim-to-Real(仿真到现实)中系统辨识的重要性。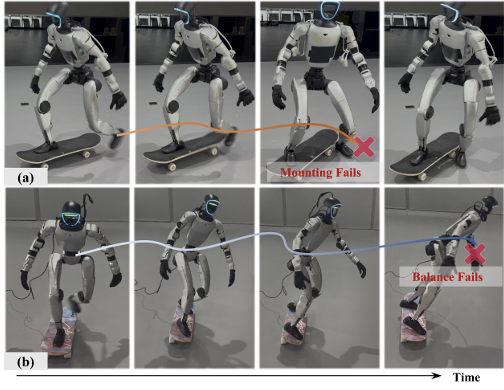 (a) 如果把软板的参数用在硬板上,机器人会以为板子很容易倾斜,结果踩上去板子不动,导致上板失败。 (b) 如果把硬板的参数用在软板上,机器人会用力过猛,导致转向过度失去平衡 。这也解释了为什么 HUSKY 需要对真实的滑板进行物理参数辨识(阻尼、刚度等)。最后,为了让机器人的姿态更像人,研究人员从人类动作数据集(M)中提取了参考姿态。
(a) 如果把软板的参数用在硬板上,机器人会以为板子很容易倾斜,结果踩上去板子不动,导致上板失败。 (b) 如果把硬板的参数用在软板上,机器人会用力过猛,导致转向过度失去平衡 。这也解释了为什么 HUSKY 需要对真实的滑板进行物理参数辨识(阻尼、刚度等)。最后,为了让机器人的姿态更像人,研究人员从人类动作数据集(M)中提取了参考姿态。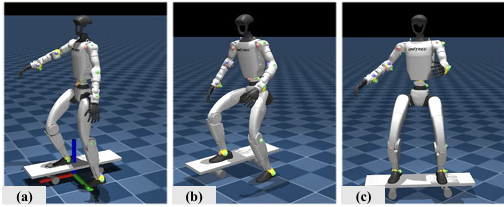 (a) 默认站姿;(b) 蹬地阶段的参考姿态;(c) 转向阶段的参考姿态。这些先验数据帮助机器人“形神兼备” 。通用性测试:HUSKY 不仅能玩一种板,还能适应各种不同规格的滑板。
(a) 默认站姿;(b) 蹬地阶段的参考姿态;(c) 转向阶段的参考姿态。这些先验数据帮助机器人“形神兼备” 。通用性测试:HUSKY 不仅能玩一种板,还能适应各种不同规格的滑板。 无论是长板还是短板,HUSKY 都能驾驭,证明了算法的鲁棒性 。
无论是长板还是短板,HUSKY 都能驾驭,证明了算法的鲁棒性 。
结语
HUSKY 系统的成功,不仅仅是让机器人学会了一个耍酷的技能。它标志着人形机器人在全身动态平衡控制和复杂人-物交互方面取得了重要突破。
通过将物理学的先验知识(Physics-Aware)与数据驱动的强化学习(RL)相结合,我们看到了一条通往更敏捷、更通用机器人的光明路径。
想象一下,未来的外卖机器人不再是慢慢悠悠的轮式小车,而是踩着滑板在街头穿梭的滑板,那将是怎样一番景象?
推荐阅读



×
右键可直接复制图片