
 阅读时间大约6分钟(2068字)
阅读时间大约6分钟(2068字)
2026-04-22 尝试摆脱遥控器,人形机器人怎样“独立”快跑
来源:人形大讲堂
人形机器人的自主性将向更深层次的“长期自主性”演进。
出品:人形大讲堂

2026年4月19日,北京亦庄人形机器人半程马拉松落下帷幕。从实验室验证走向开放场景落地,来自超百支队伍、26个品牌的300余台人形机器人集体完成一次“压力测试”。
自主导航技术的首次规模化应用,是赛事的一大亮点。报名赛队按技术路线分为自主导航与遥控两个组别。其中自主导航组占比约40%,意味着机器人上场后必须“独立”,自主完成定位、避障路径规划与动态决策等。

2025人形机器人半程马拉松,参赛机器人与领航员同框
▍“自主性”争议驱动技术革新
人形机器人对遥控器的依赖引发广泛争议。操作层面的局限性凸显:响应延迟导致机器人难以及时应对动态环境,操控者需兼具精准判断与高速反应能力。
长时间操作遥控器容易让操作者感到疲劳,影响操作的准确性和稳定性。这些局限使得依赖遥控器的人形机器人在竞赛中的表现受到很大制约,难以充分发挥其潜力。
在部分民众认知里,依赖遥控器的人形机器人摆脱不了“高级玩具”的标签,缺乏自主思考和决策的能力,无法根据环境变化灵活调整行动,并非真正意义上的智能机器人。这与人们对智能机器人的期待相去甚远。
尽管业界普遍认为,在人形机器人尚未具备充分的感知能力与智能化决策水平之前,依赖遥控器进行操控是技术发展过程中无法绕开的阶段性必要路径。
关于自主性的争议,客观上驱动着技术革新。科研机构与产业主体持续深化对环境感知、自主规划及实时决策等核心技术的攻关,以突破外部控制的技术瓶颈,推动人形机器人向更高阶的自主化能力演进。
为了鼓励自主导航技术研发,赛事组委会创新成绩核算规则。两组采用混合计时、统一排名,遥控组成绩需乘以1.2的加权系数,再加上更换机器人、在规定区域外换电池等情况的罚时,才计入最终成绩。即便遥控机器人率先冲线,最终成绩也可能因系数调整落后于自主导航机器人。
严格的规则约束成为技术进步的“催化剂”。自主导航组仅允许在起跑启动、换电辅助、紧急避障、故障停机四类场景进行人工干预,累计干预超3次将自动转为遥控组核算成绩。这种机制设计迫使所有参赛队伍必须在“容易实现但成绩打折”和“技术难度高但竞争力更强”之间进行选择。
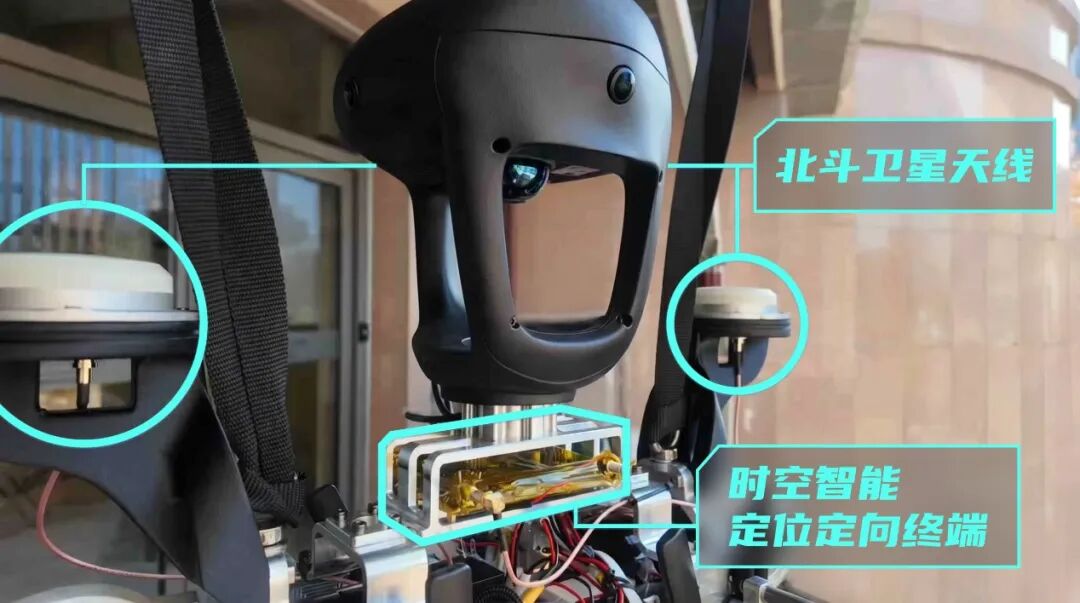
2026人形机器人半程马拉松,多支自主赛队采用北斗时空智能方案
▍当“聪明赛道”遇上“强悍跑者”
人形机器人在21.0975公里的城市赛道上实现自主奔跑,本质上是构建一个复杂的“感知—决策—执行”闭环,其原理与汽车智能驾驶高度相似。机器人必须实时、精准地感知自身位置,规划最优路径,控制运动姿态并做出即时决策。在长距离高速奔跑中,任何微小的定位偏移都可能导致跑偏甚至碰撞,这对定位的精度与稳定性提出了极高要求。
去年4月,千寻位置正式发布机器人时空智能三体开发套件SpatiX,旨在降低研发门槛、提升效率。时隔一年,该套件已成为本次赛事中超过三分之二参赛队伍的“标配”。这套“时空智能三体套件”不仅包含时空智能服务,还涵盖模组、板卡、定制天线及即装即用的整机盒子,开发者可快速接入千寻位置的能力,集成大气推理、电离层感知及防欺骗等专为机器人定制的特色服务。
这为机器人提供了厘米级的高精度定位和稳定的姿态感知,使其能在复杂的城市环境中有效抵御信号干扰,确保路径规划与运动控制的精准执行,为机器人的感知、规划与决策奠定了坚实的技术底座。
除了提供机器人专项导航支持外,千寻位置还为整场赛事统一了全域时空基准,确立时间与空间坐标标准,保障赛事计时与轨迹统计的公平精准。300余台机器人均配备北斗时空智能肩章,实时回传位置、速度及里程数据,组委会得以全程监控赛事状态、高效调度管理。
在“大脑”日益聪明的同时,机器人的“身体”也练得更壮。细心的观察者会发现,今年成绩领先的参赛机器人,普遍采用了性能更高的自研关节模组。例如部分机器人的髋关节电机尺寸明显增大,从而提供了更强的扭矩,这是实现高速奔跑的基础。
此次获得冠军的“闪电”机器人拥有0.95米长的“大长腿”,采用荣耀自研一体化关节模组,峰值扭矩可达400牛米;北京松延动力的参赛机器人电机的峰值扭矩也从去年的150牛·米提升至360牛·米,为高速奔跑提供了强劲动力。

国产机器人在海外工厂参与生产工作
▍跨越“自主导航”这一门槛
人形机器人正站在从实验室走向真实世界的关键拐点。如果说过去它们更像是需要人工遥控的“高科技玩具”,那么如今,行业正全力以赴推动其蜕变为能独立判断、自主行动的“智能伙伴”。而这场变革的核心,正是“自主性”的突破。
真实的工业与家庭环境远比马拉松赛道复杂。行业观察表明,机器人去掉遥控器、实现全自主导航是产业落地的必要条件。未来的自主导航,不仅要解决“怎么走”的问题,更要解决在动态、非结构化环境中“走得稳、走得对”的挑战。
如果说自主导航解决了“腿脚”的自由,那么“大脑”与“小脑”的协同,则决定了机器人能干什么、干得好不好。行业常用“大脑-小脑-躯干”来类比机器人系统:躯干负责执行动作,小脑掌管运动控制与平衡,大脑则负责高层决策与意图理解。近年来,得益于强化学习和硬件工艺的进步,机器人在“小脑”和“躯干”层面已突飞猛进,奔跑、后空翻等高难度动作已不罕见。
但短板依然明显:它们的“AI含量”不足,尤其是“大脑”还不够聪明。当前最大的瓶颈是泛化能力弱——机器人往往只能在固定场景完成特定任务,环境稍有变化,成功率就大幅下降。
展望未来,人形机器人的自主性将向更深层次的“长期自主性”演进。未来的机器人不仅能自主完成任务,还将具备自诊断、自修复和持续学习的能力。这不仅要求硬件更可靠、更节能,更要求软件系统具备强大的容错性和知识持续更新能力。开发真正聪明的人形机器人,这场关于智能体如何感知世界、理解意图并采取行动的探索,最终将指向一个更加智能、和谐的人机共生未来。

推荐阅读





×
右键可直接复制图片