 阅读时间大约9分钟(3471字)
阅读时间大约9分钟(3471字)
5小时前 机器人关节里的三种减速器:行星、谐波、RV到底差在哪
来源:机器人技术笔记
行星、谐波和RV分别偏向通用集成、紧凑高精度与重载抗冲击
出品:机器人技术笔记
机器人的动力来源是电机。电机转得快,但输出不了很大的扭矩。
所以中间就需要减速器。
减速器做的事听起来简单,把高速小扭矩变成低速大扭矩。但在机器人里,它绝不只是一个力矩放大器。它会影响关节尺寸、刚度、回差、噪声、寿命、成本、装配难度,也会影响控制器到底能不能把一个动作稳定做出来。
最常遇到的三类精密减速器,就是行星减速器、谐波减速器和 RV 减速器。
这三种东西经常被放在同一张选型表里,但它们解决的问题并不完全一样。行星减速器像一个结构紧凑、成本友好的通用方案;谐波减速器擅长在小体积里做出高减速比和高精度;RV 减速器更像工业机器人重载关节里的硬骨头,抗冲击、刚度高,但结构和制造也更重。
今天这篇文章不追求把齿形、公式和制造细节讲满。我们只解决一个工程问题:机器人关节为什么会同时用这三种减速器,它们各自适合什么场景,又各自要付出什么代价。
行星减速器:电机后面最常见的力矩放大器

行星减速器的结构很好理解。中间有一个太阳轮,外面有几个行星轮,行星轮装在行星架上,最外圈是内齿圈。电机带动太阳轮转,行星轮一边自转,一边绕着太阳轮公转,最后把运动传到行星架或者输出端。

这个结构的好处,是负载可以由多个行星轮分担。一个齿轮承担不了太大的力,几个齿轮一起承担,结构就能做得更紧凑。对机器人关节来说,这很有吸引力,因为关节空间通常很紧,电机、编码器、驱动板、制动器和线束都在抢体积。
行星减速器还有一个很现实的优势:供应链成熟。它不只出现在机器人里,也大量出现在自动化设备、机床附件、电动工具、AGV 驱动轮、夹爪和各种小型执行机构里。工程师要找一款合适的行星减速器,通常不需要从零开始教育供应商。
行星减速器的特点,可以概括成三个词:紧凑、通用、好用。
它适合放在一些对体积、成本、集成便利性比较敏感的机器人部位。比如移动机器人轮毂附近的小型驱动结构、夹爪开合机构、小型机械臂、服务机器人里的升降或旋转关节,都可能看到行星减速器。它的结构相对直观,制造路线成熟,单级和多级组合也比较灵活。
优势也来自这里。行星减速器可以做出不错的扭矩密度,效率通常也比较友好,结构同轴,便于和电机集成。对刚入门的工程师来说,它像是一个比较稳妥的默认选项:只要负载、精度和寿命要求没有特别苛刻,先用行星减速器做方案验证,往往不会太离谱。
但它的问题也不能忽略。
第一是回差。精密行星减速器可以把回差做得很小,但这会带来制造和装配成本。机器人如果要做高精度末端定位,回差会直接体现在关节角度误差里。控制器可以补偿一部分,但机械间隙本身不会因为算法写得漂亮就消失。
第二是刚度和承载边界。行星减速器能承担不少场景,但面对工业机器人底座、大臂这类重载关节时,它通常不是最理想的方案。负载越大,冲击越强,对齿轮、轴承、壳体和润滑的要求越高,结构尺寸也会跟着上来。
第三是多级减速的代价。想要更高减速比,可以多级串联,但级数上来以后,长度、回差、噪声、效率损失和装配误差都会积累。小型机构里这能接受,精密大关节里就要慎重。
所以行星减速器在机器人里的典型位置,是中小负载、成本敏感、结构紧凑、精度要求中等到较高的执行部位。它并不只属于低端方案,精密行星减速器也可以很贵、很准,很多准直驱(QDD)关节模组就会选择精密行星减速器。只是它的工程气质更接近通用可靠,对极限精密和极限抗冲击的覆盖没有那么强。
谐波减速器:小体积里做高减速比

谐波减速器的结构第一次看会有点反直觉。它主要由三件东西组成:波发生器、柔轮和刚轮。波发生器通常是一个椭圆形凸轮加柔性轴承,柔轮是薄壁杯形或者薄壁环形零件,刚轮则是带内齿的刚性齿圈。

工作时,波发生器把柔轮撑成轻微椭圆。柔轮外齿只在椭圆长轴附近和刚轮内齿啮合。柔轮和刚轮的齿数故意差一点点,波发生器转一圈,柔轮相对刚轮只慢慢错开一个小角度。这个少齿差机制,就能在很小空间里做出较高减速比。
这也是谐波减速器在机器人里受欢迎的核心原因。机械臂腕部、肘部、肩部都希望关节越薄越好,尤其是轻量化机械臂和协作机器人。电机可以藏在关节里,减速器也要尽量短、尽量轻、尽量同轴。谐波减速器刚好踩在这个需求上。
谐波减速器的特点,是高减速比、高精度、结构紧凑。
它很适合机器人手臂里空间紧张、需要精密位置控制的关节。工业机械臂的小臂和腕部、协作机器人关节、人形机器人上肢、一些紧凑型云台和精密转台,都可能用谐波减速器。你可以把它理解成一种在有限体积里换取角度精度和力矩放大的方案。
它的优势很明显。结构同轴,零件数量相对少,减速比可以做得高,传动精度好,回差可以控制得很小。对于机械臂来说,这意味着关节可以做薄,末端定位也更容易做稳定。对产品设计来说,这会直接影响外观体积和整机重量。
但谐波减速器的代价也很典型。
第一个代价是柔轮。柔轮靠弹性变形工作,这让它有了谐波传动的核心能力,也让它成为寿命、疲劳和过载风险的重要来源。机器人关节如果长期承受冲击载荷,或者经常在边界工况下工作,柔轮的疲劳寿命就不能只看静态扭矩。
第二个代价是扭转刚度和动态响应。谐波减速器精度高,但它的刚度不高。柔轮的弹性会带来扭转变形,负载变化时关节输出端会有细微的弹性响应。对普通位置控制来说,这往往可以接受;对高带宽力控、强冲击腿足关节或者需要非常硬的重载关节来说,这就会变成工程约束。
第三个代价是制造和装配要求。柔轮、刚轮、波发生器之间的齿形、材料、热处理、润滑和装配都会影响寿命与精度。谐波减速器看起来零件不多,但精密加工和一致性控制并不轻松。
所以谐波减速器不是万能精密件。它适合轻量、紧凑、精密的位置伺服场景,尤其适合机械臂中小关节和腕部关节。它不太适合长期重冲击、高刚度重载、极端抗过载要求的地方。工程上选择谐波,往往是在体积、精度和负载之间做平衡。
RV减速器:重载关节里的抗冲击选手

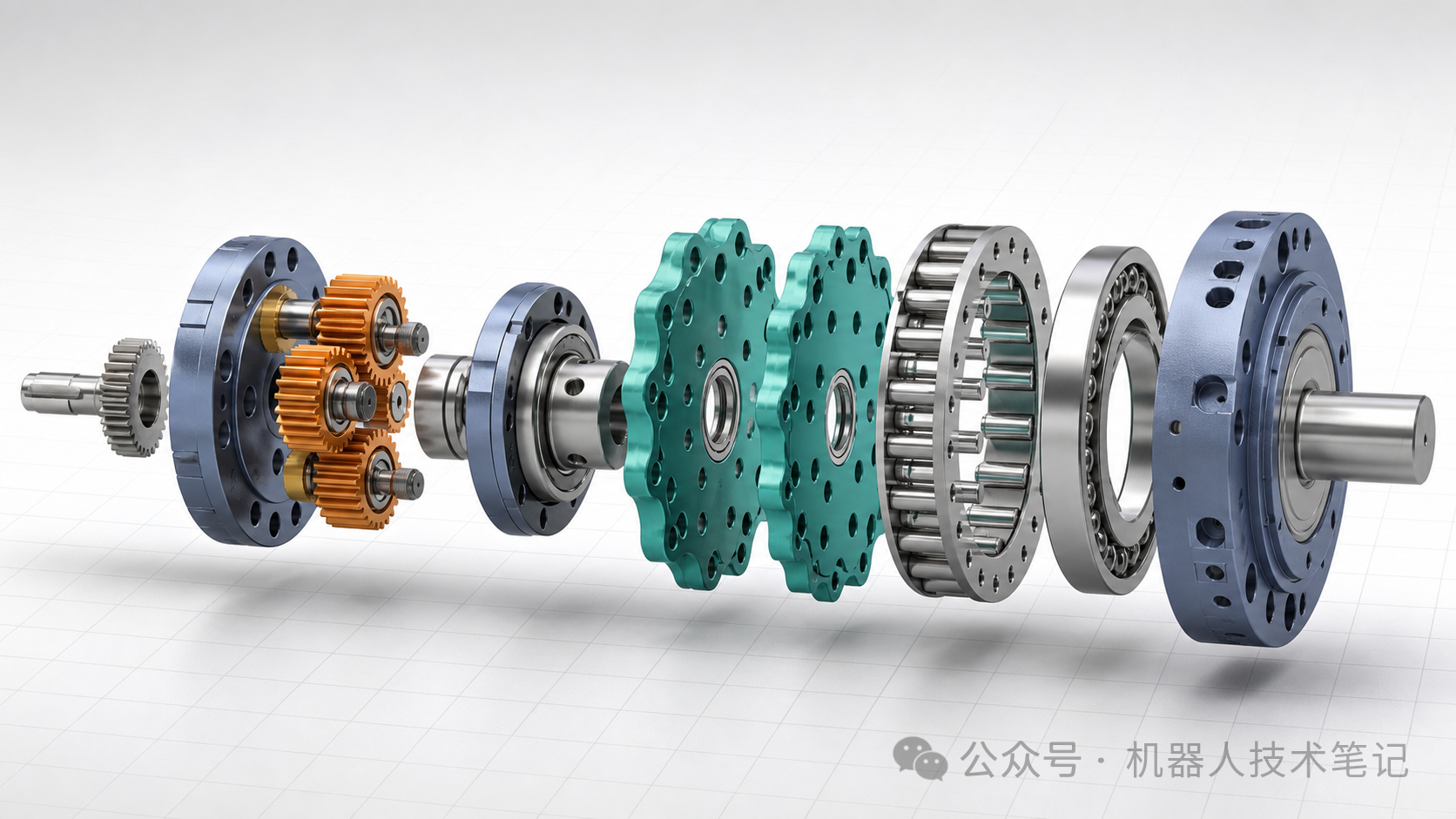
RV 减速器常被叫作摆线针轮减速器的一类精密方案。它的结构比前两种更复杂。一般可以理解成两级传动:前面一级齿轮先把电机转速降下来,后面通过偏心轴驱动摆线轮,让摆线轮在针齿壳内滚动啮合,最后由输出法兰把运动汇总出来。

这里最关键的是摆线轮和针齿壳。摆线轮不是普通直齿轮,它的外形是一圈起伏的摆线轮廓。针齿壳里有一圈针销,摆线轮在偏心轴带动下做偏心运动,和针销逐步啮合。因为同时参与接触的齿数比较多,力可以分散到更多接触点上。
这就是 RV 减速器抗冲击、刚度高、承载能力强的重要来源。
它常出现在工业机器人里负载更大的关节,比如底座、肩部、大臂这些位置。原因很直接:这些关节离机器人根部近,要承受后面整条手臂和负载带来的力矩。机械臂高速启停时,惯性冲击也会往这些关节上打。这个时候,工程师更关心刚度、寿命、冲击能力和长期稳定性。
RV 的优势正好对应这些需求。多齿啮合让它承载能力强,输出刚度高,抗冲击能力好,精度保持性也适合重载工业场景。对工厂里的焊接、搬运、码垛、机床上下料这类任务来说,机器人关节不只是要转到位,还要多年稳定重复工作。RV 在这些地方很有价值。
但 RV 的代价也不小。
第一是结构复杂。一级齿轮、偏心轴、摆线轮、针齿壳、轴承和输出机构组合在一起,零件数量和装配要求都高。它不像行星减速器那么直观,也不像谐波减速器那样轻薄。
第二是体积和重量。RV 通常更适合放在大关节上,对追求极致轻薄的小腕部并不友好。对于协作机器人、人形机器人上肢或者空间特别紧张的关节,RV 的重量和尺寸可能会让整机设计变得别扭。
第三是制造成本和调试门槛。摆线齿形、针齿分布、偏心轴精度、轴承预紧、装配间隙都会影响性能。做出一个看起来像 RV 的结构不难,做出长期稳定、低回差、高刚度、寿命可靠的精密 RV,并不便宜。
所以 RV 减速器在机器人里的典型应用,是中重载工业机器人、搬运机器人、大臂关节和底座关节。它追求的是大扭矩、高刚度和抗冲击。它不一定适合小型轻量化关节,但在重载工业机器人里,它经常是非常有说服力的选择。
放进关节模组里,三种减速器该怎么搭配
前面讲的是减速器本身,但机器人最终使用的是一套关节模组。
之前我们介绍过不同机器人关节模组的设计思路「」。
对于高刚度位置伺服的目标,是把轨迹执行得准、稳,并且能够持续保载。它通常会采用较高减速比,让较小的电机获得足够大的输出扭矩。因此,行星、谐波和 RV 都能进入这条路线。
柔性关节的关键,是在电机和负载之间保留一个可测量的弹性环节。控制器通过测量弹性变形估算输出力矩,同时利用这段形变缓冲碰撞和落地冲击。所以天然谐波减速器更适合这条路线。
准直驱关节走的是另一条路。它用大直径、高扭矩密度电机搭配低减速比传动,尽量减少电机和外部负载之间的隔阂,让关节更容易反驱,也让电机电流更接近真实输出力矩。在三种减速器里,行星减速器通常最容易和准直驱关节结合。它可以做较低减速比,传动效率较高,结构同轴,多个行星轮还能分担负载。
实际选型要根据需求来
做方案初筛时,可以先按关节任务快速判断:中小负载、成本敏感、希望供应链成熟,优先看行星减速器;空间紧、减速比高、回差要求小,优先看谐波减速器;负载大、冲击强、长期运行更看重刚度和寿命,优先看 RV 减速器。
最后再用峰值扭矩、连续扭矩、减速比、回差、效率、寿命、重量和成本逐项核算。先按任务选路线,再按参数定型号,会比直接比较哪种减速器更先进更有效。
回到机器人关节本身,行星、谐波和 RV 没有绝对的高低之分。它们只是用不同的结构,在体积、精度、刚度、冲击和成本之间交换条件。使用不同的减速器,机器人关节也就有了不同的特性,有的轻巧灵活,有的精准紧凑,有的则更适合长期扛住重载。

推荐阅读



×
右键可直接复制图片