 阅读时间大约7分钟(2535字)
阅读时间大约7分钟(2535字)
2025-04-30 卖出近2000台灵巧手的企业,第7轮融资!
来源:文心一言
资本与市场的狂热正从本体转向上游零部件,尤其是对于人形机器人而言极为重要的末端执行器,国内人形机器人产业链正悄然掀起一场关于“灵巧手”的暗战。
作者:Levi. 出品:高工人形机器人
资本与市场的狂热正从本体转向上游零部件,尤其是对于人形机器人而言极为重要的末端执行器,国内人形机器人产业链正悄然掀起一场关于“灵巧手”的暗战。
近一年以来,魔法原子、宇树科技等本体企业陆续推出自研灵巧手,零部件端的兆威机电、雷赛智能等凭借“手”的解决方案迅速卡位,专心押注灵巧手赛道的傲意科技、灵心巧手等更是接连获得资方青睐。
最新的动态是,灵巧手企业因时机器人(全称:北京因时机器人科技有限公司)已完成近亿元人民币的B3轮融资。

图源:天眼查

加码“近亿”背后的融资逻辑
天眼查信息显示,因时机器人本轮融资由神骐资本领投,源禾资本、华盖资本跟投,久谦资本担任长期独家财务顾问。这是继2024年9月超亿元B2轮融资后的又一次资本加码。
从资方背景看,神骐资本深耕智能制造领域,专注于中早期创企投资,曾布局爱泊车、乐刻运动等硬科技项目;源禾资本聚焦新能源与机器人产业链协同,华盖资本则强调“扎实基本盘+高潜发展面”的双轮驱动。
资方们的诉求高度一致:通过因时机器人在微型伺服电缸与灵巧手的“卡脖子”技术突破,抢占人形机器人这一万亿级市场的核心零部件入口。
截至目前,因时机器人已完成7轮融资。其中,去年9月完成的B2轮融资由达晨财智领投,深创投、科沃斯等跟投,而在更早的B1轮融资完成后,公司估值达8亿人民币。据悉,该轮融资后,因时机器人将进一步加大在尖端技术研发、产品迭代以及全球化市场拓展等方面的投入。
细究融资背后的逻辑,或许正是因为因时机器人在技术壁垒方面的验证,以及商业化兑现能力,而这些还要从创始人蔡颖鹏的创业说起,其创业轨迹,也是中国机器人产业从“集成组装”迈向“核心零部件自主”的缩影。
2012年,蔡颖鹏创立英诗派机器人,从事工业和服务机器人ODM业务,期间意识到机器人发展的瓶颈在于零部件。随后2016年果断转型——成立因时机器人,瞄准微型伺服电缸这一空白领域。
其团队历时四年攻克微型化、高精度加工工艺难题,并于2020年实现量产。其微型伺服电缸体积为传统产品的1/4-1/3,精度从传统电缸的毫米级误差跨越至微米级控制,成为灵巧手的核心“肌肉”单元。
同年,因时机器人将微型伺服电缸技术迁移至灵巧手领域,推出中国首款商业化量产五指灵巧手RH56系列,通过医疗、3C制造等场景实现商业化落地。该产品以6自由度、12运动关节设计,实现±0.2mm重复定位精度与3kg单指抓握力。
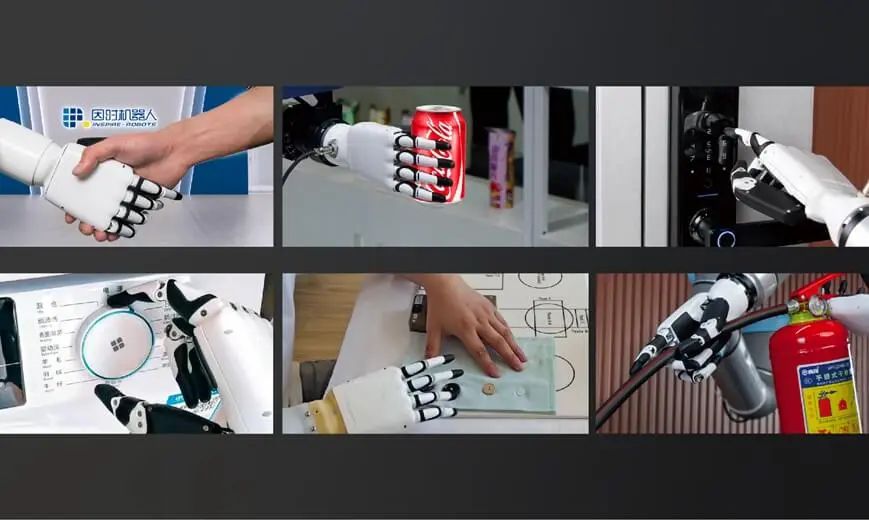
图源:因时机器人
目前,因时机器人的灵巧手主要有RH56BFX系列、RH56DFX系列、FTP系列。其中,RH56系列均具备6个自由度和12个运动关节,去年8月推出的FTP系列,表面则集成了5-17个触觉传感器模块,分布于指尖、指腹、手掌部位。
官方数据显示,2024年,因时机器人灵巧手交付量近2000台,全年业绩较2023年翻倍增长,海外业务增长20倍,营收年复合增长率超100%。其微型伺服电缸得益于在工业、医疗等领域的广泛应用,进一步降低成本。另据因时机器人CMO房海南表示,因时机器人今年Q1整体增长态势非常明显。
灵巧手创企三大阵营
受益于人形机器人产业的发展,灵巧手市场正迎来一波发展热潮。GGII数据显示,2024年中国机器人灵巧手市场销量约0.57万只,预计到2030年,国内机器人灵巧手市场销量将有望突破34万只,2024-2030年CAGR约为90%。

2021-2030年中国灵巧手市场销量及预测(单位:万只)
图源:GGII
风口之下,入局者蜂拥而至。据GGII不完全统计,截至2025年3月,国内灵巧手企业数量已超40家。成立时间早的如傲意科技(2015年)、因时机器人(2016年),晚的也多在近两三年,如因克斯(2022)、灵心巧手(2023)、灵巧智能(2024)。
入局者虽多,繁荣背后暗藏分野。
国内灵巧手企业不知不觉间划分三大阵营:本体企业自研派、零部件企业延伸派、专精深耕派。
本体自研一派——魔法原子今年2月发布的第一代自研灵巧手 MagicHand S01,单手具备11个自由度,基于电流与触觉融合的力位混合控制技术,可实现抓、握、双指操作等动作。魔法原子在灵巧手上的自研突破,源于其对人形机器人整体性能提升的追求。
宇树科技4月发布的Unitree Dex5灵巧手,单手具备20自由度,能柔顺丝滑反向驱动。
本体厂商自研灵巧手,是为完善生态闭环。据高工人形机器人此前接触的部分本体企业表示,自研灵巧手,一部分原因是国内灵巧手产品使用情况不及预期。
不过,换一种角度也可以理解成是一种防御性布局,本体企业通过自研灵巧手,探索独特的技术路线和解决方案,实现技术创新。另外,通过自研灵巧手优化整机性能的同时,也能降低对外部供应链的依赖。
零部件企业延伸派——兆威机电以微型传动系统为核心,其灵巧手采用微型谐波减速器,外径仅8mm,实现±0.05mm定位精度,该灵巧手可适用于工业生产、特种作业、生活服务等复杂多变的操作环境。
雷赛智能则聚焦于高负载与工业适配性,依托其在电机驱动、运动控制等核心技术上的优势,开发出了适合工业自动化、物流搬运和协作机器人等场景的灵巧手产品。其DH116灵巧手具备11自由度,负载达40kg,通过标准化组件降低量产成本,更强调性价比优势。
零部件企业的押注大概可以概括为两点:一是利用传统业务积累的电机、减速器技术向下游拓展产业链,提高产品的附加值;二是凭借核心器件的优势,快速构建灵巧手产品的差异化竞争优势,在新兴的灵巧手市场占据一席之地。
人形机器人产业的快速发展,对灵巧手的需求日益增加。零部件企业敏锐地捕捉到这一市场机遇,提前布局以便日后产业爆发式增长的过程中分得一杯羹。
专精深耕派——灵心巧手自主研发的Linker Hand系列灵巧手,工业版自由度可达25-30,科研版高达42,每根手指最高独立拥有9个自由度,能进行360度自由旋转,这使其成为全球自由度最高的商用灵巧手。该系列覆盖连杆结构和键绳结构两种设计方案,灵心巧手也是国内唯一实现两种灵巧手结构同时商业化量产的公司。
傲意科技的ROHand灵巧手具备11个自由度,重复定位精度可达±1mm,手指开合时长最短可到0.7秒,控制频率高达100Hz。该灵巧手能够模拟人手实现多种手势动作,如捏取、抓握等,单个手指可负载最高达10kg,整手可负载30kg的重物。
对于“专精深耕派”而言,它们从一开始就将全部精力投入到灵巧手的研发与生产中。这类企业的目的相对更为单纯:一是通过聚焦灵巧手这一单品,集中资源进行技术研发与创新,提升灵巧手的性能指标,为市场提供更优质的灵巧手产品;二是借助灵巧手这一细分领域,打造企业的核心竞争力,力求在人形机器人产业链中占据不可替代的地位。
小结
三大派别正以截然不同的逻辑重构产业格局。
本体企业凭借对机器人整体性能的深刻理解和系统整合能力,在灵巧手研发上追求与本体的高度适配,以提升整机竞争力;零部件企业依托自身在核心零部件领域的技术优势和产业资源,向灵巧手领域拓展,旨在实现业务升级和市场扩张;而专注于灵巧手的企业则以专业的姿态深耕细分市场,满足多样化需求,力求在行业内崭露头角。
未来,三大阵营的竞争与合作,想必是更加频繁与深入,同时推动灵巧手产业向更高水平迈进。但市场终究要回归现实,灵巧手产业未来进化逻辑如何?技术路线如何收敛?产业主导权如何分配?仍待观察。

推荐阅读





×
右键可直接复制图片