 阅读时间大约8分钟(2854字)
阅读时间大约8分钟(2854字)
2025-05-07 具身智能的 “关节革命”:高性能执行器如何重塑人形机器人的未来
来源:机器人产业应用
一场围绕机器人关节设计展开的 “关节革命”,正以高性能执行器技术为核心,彻底改写人形机器人的运动性能边界。
作者:张艺凡 出品:机器人产业应用
在科幻电影《机械姬》中,艾娃以灵动的肢体语言与人类对话,流畅的关节转动、细腻的动作表现,让观众惊叹于未来机器人的拟生魅力。如今,随着具身智能技术的突破,科幻场景正加速照进现实。而在这场科技革命中,一场围绕机器人关节设计展开的 “关节革命”,正以高性能执行器技术为核心,彻底改写人形机器人的运动性能边界。
01
揭开 PSA 执行器的神秘面纱:
精密传动的进化密码
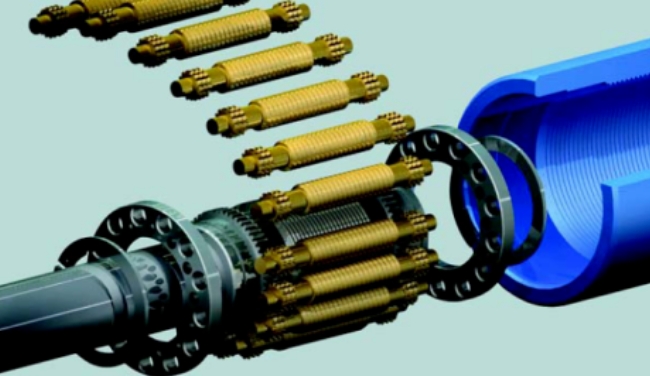
在机器人关节设计领域,PSA 执行器(行星滚柱丝杠执行器)堪称 “工业关节的心脏”。传统滚珠丝杠传动中,滚珠与丝杠为点接触,承载能力与精度受限;而 PSA 执行器创新采用行星滚柱结构,通过多线接触设计,将接触面积提升 30 倍以上。
这种结构上的革新,使得力的传递更为均匀,极大降低了局部磨损。据国际权威机构测试数据显示,搭载 PSA 执行器的关节,其传动效率较传统方案提升 25%,负载能力增强 50%,定位精度可达 ±0.01mm,近乎达到微米级的控制水准。

| 行星滚柱丝杠示意图
| 传统丝杠
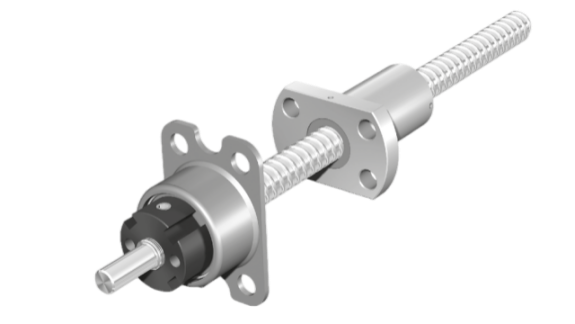
为保证性能,PSA 执行器的滚柱和丝杠通常会选用结实耐用的高强度合金钢,并通过特殊工艺处理表面。比如渗氮处理,能在金属表面生成一层超硬的氮化层,让耐磨能力提升 60%;而激光熔覆技术,则是给关键部位 “穿上” 特殊合金 “防护衣”,增强抗疲劳能力。
在生产制造上,五轴联动加工中心发挥了大作用,它可以精准加工出滚柱上的螺旋槽,误差不超过 0.005mm,确保每个零件都能严丝合缝地配合在一起。
PSA 执行器的精准传动能力,在仿生髋部设计上展现得十分出色。人的髋关节一秒钟要调整 12 到 15 次,才能在各种复杂路面上正常行走。仿生髋部装上 PSA 执行器后,搭配高精度传感器和伺服系统,就像长了 “眼睛” 和 “大脑”,能快速收集地面信息,在 0.02 秒内调整角度和力度。
在 2024 年国际机器人运动比赛里,用了 PSA 执行器的仿生机器人,在模拟山地、台阶这些难走的地方,走路稳定性高达 98.7%,比普通机器人更会适应复杂地形。
在机器人关节里,除了关键的 PSA 执行器,谐波减速器同样是不可或缺的重要零件。谐波减速器的工作原理,是通过能灵活变形的特殊部件,把运动和力量传递出去。它的优势很明显,体积小巧不占地方,能实现大幅度的速度转换,而且控制精度非常高。
在实际应用中,谐波减速器和 PSA 执行器就像默契的搭档:谐波减速器先 “发力”,把转速降下来,同时增大输出的力量;接着 PSA 执行器 “接力”,负责精准调整位置、输出动力。两者相互配合,让机器人关节既能输出强劲动力,又能做出精细准确的动作。
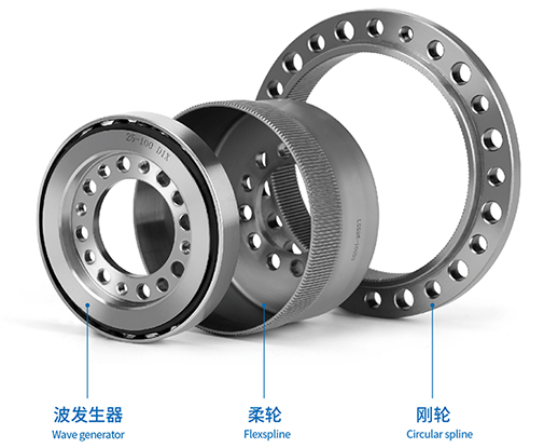
| 谐波减速器
02
伽南科技 Adam 的惊艳表现:
太极表演背后的技术突破
伽南科技人形机器人 Adam 在 2025 中关村论坛年会上的太极表演,成为技术与艺术融合的典范。Adam 能完成单腿转圈、掌心托物慢慢下蹲这些高难度动作,就像专业运动员一样厉害,这都要归功于它身上一套特别的 “关节黑科技”—— 自主研发的 7 自由度复合关节系统。
这套系统就像是 Adam 的 “关节大脑”,里面藏着 3 组 PSA 执行器和 4 组谐波减速器。PSA 执行器就像超有劲的 “动力小马达”,能提供强大的力量;谐波减速器则像个 “精准调节员”,可以把动力调整得更合适。它们相互配合,让 Adam 的关节既有力气又能灵活运动。
再加上一套精密的 “力量控制算法”,就像给 Adam 的关节装上了 “智能开关”,能把力量控制得特别精准,哪怕只需要改变 0.1N・m 的微小力量,它都能准确做到。这样一来,Adam 就能稳稳完成各种高难度动作,不会出现用力过猛或者力量不够的情况 。
| Adam机器人动作展示视频
研发团队透露,为还原太极 “缠丝劲” 的力学特性,Adam 关节采用了仿生肌肉束结构设计,通过 32 组微型传感器实时监测关节应力分布。在太极 “云手” 动作中,Adam 的手臂能灵活地转动 270°,比人类手臂转动幅度还要大。不仅转得够灵活,它的手部动作还特别精准,误差不超过半毫米,所以打太极时每个动作都圆融流畅,完全没有生硬感。
此外,Adam 身上还装了 “聪明的小助手”—— 惯性测量单元(IMU),就像它的 “身体感知器”,能时刻知道自己站得稳不稳、动作做到哪儿了。再搭配上它的 “眼睛”(视觉传感器),就能看清周围环境。有了这些 “装备”,Adam 就能提前规划好动作,就像我们提前想好下一步怎么走一样,保证整套太极动作又连贯又稳当,不会出现卡顿或摔倒的情况。
| Adam机器人打太极视频
这场表演不仅证明了高性能执行器在复杂动作控制中的可行性,更标志着人形机器人从 “能运动” 向 “会表演” 的质变跨越。Adam 的成功背后,是对机器人动力学、控制理论、材料科学等多学科的深度融合与创新应用。
03
前沿技术探索:执行器的未来发展方向
除了现有的成熟技术,执行器领域还有许多前沿技术正在探索和发展。其中,软体执行器备受关注。软体执行器采用柔性材料,如形状记忆合金、介电弹性体等,能够实现更加灵活、仿生的运动。例如,介电弹性体在电场作用下会发生形变,通过控制电场强度和方向,可以实现复杂的变形动作,这种特性使得软体执行器在医疗机器人、救援机器人等领域具有广阔的应用前景。
在这一领域,北京软体机器人科技有限公司(SRT)表现突出,作为国内首家研发量产柔性夹爪的公司,也是全球仅有的两家量产企业之一,其产品源于对章鱼、水母等生物的仿生研究,利用柔性材料解决异形、易损物品的抓取难题,广泛应用于 3C、动力电池、食品等行业,还涉足医疗领域推出手部康复机器人。
| SRT柔性末端执行器
智能材料的应用也为执行器带来新的可能。例如,磁流变材料在磁场作用下,其流变性能会发生迅速、可逆的变化,利用这一特性可以开发出响应速度快、控制精度高的磁流变执行器。
此外,自修复材料的研究进展,有望解决执行器在长期使用过程中出现的磨损、损坏等问题,提高执行器的可靠性和使用寿命。
在智能材料应用方面,金发科技股份有限公司作为化工新材料龙头,自主研发的 PEEK、PA66 等高性能工程材料,凭借耐磨、耐热等特性,可用于机器人执行器的关键部件;南山智尚科技股份有限公司则在纺织新材料领域深耕,其研发的抗蠕变超高分子量聚乙烯纤维处于国内领先水平,还通过创新联合体为人形机器人提供传动和皮肤材料等。

| 金发科技无卤阻燃增强PA66
在驱动方式上,除了传统的电动驱动,液压驱动和气动驱动也在不断改进和创新。液压驱动具有功率密度大、响应速度快的特点,适合应用于需要大负载、高动态性能的机器人关节;气动驱动则具有成本低、清洁无污染的优势,在一些对环境要求较高的场合,如食品加工、医疗等领域,有着独特的应用价值。
未来,多种驱动方式的融合与协同控制,将为机器人关节的性能提升带来新的突破。三花智控积极布局机器人产业,聚焦仿生机器人机电执行器业务,在电机驱动技术研发上持续发力;美国的 Tolomatic 公司自 1954 年成立以来,在电动直线运动和气动执行器技术上处于领先地位,其产品高度耐用可靠,广泛应用于包装、医疗等多行业。
| Tolomatic 气动执行器
值得一提的还有深圳璇玑动力科技有限公司,其研发的轴向磁通电机一体化关节模组技术,为机器人执行器的发展注入新动能。璇玑动力推出的 AD-AT 7510 Motor 和 AD-AT 1010 Motor 等型号产品,扭矩密度达到 240NM/KG,最大扭矩可达 580NM,远超同类产品。
通过将电机与驱动器深度集成,模组不仅体积更小、功率密度更高,稳定性也大幅增强,同时降低了运维成本。双编码器和多传感器的配置,进一步提升了控制精度和安全性,显著提升了机器人的运动性能、负载能力和场景适应性。
此外,该公司自主研发的高性能图传系统,具备 30km 超距传输、30Mbps 大带宽等优势,配合一体化遥控设计和多机协同控制功能,操作人员能够实时获取机器人状态并精准控制,优化了 “环境感知 - 运动控制 - 远程交互” 链路,极大拓展了执行器的应用场景和使用方式。
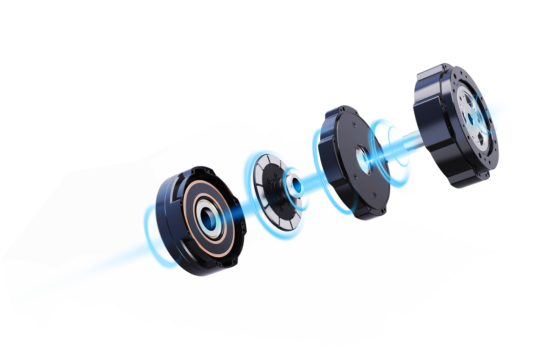
| 璇玑动力电机一体化关节模组
当机器人关节开始模仿人类的 “举手投足”,具身智能正迎来爆发式增长的黄金时代。高性能执行器不仅是机械结构的创新,更是人工智能与物理世界交互的桥梁。随着国产化进程的加速和前沿技术的不断突破,我们期待看到更多 “中国关节” 赋能全球机器人产业,让科幻电影中的未来场景,真正成为日常生活的一部分。

推荐阅读





×
右键可直接复制图片