
 阅读时间大约7分钟(2760字)
阅读时间大约7分钟(2760字)
2025-05-12 开源生态重塑机器人协作:从“单机智能”到“群体智能”的跃迁
来源:机器人产业应用
开源生态与标准化技术架构成为关键突破口。
作者:余柯 出品:机器人产业应用
人形机器人凭借其灵活的肢体结构和智能交互能力,逐步渗透至工业、医疗、服务等多个领域,推动人机协同迈向新阶段。然而,当前机器人行业仍面临硬件碎片化、协议不兼容等核心挑战,不同品牌、不同构型的机器人因接口割裂导致开发周期延长、成本激增,严重制约了规模化应用。
为解决这一行业痛点,开源生态与标准化技术架构成为关键突破口。以RoboOS为代表的统一操作系统,通过“大脑-小脑”分层架构,实现了异构机器人的即插即用与动态协作,显著提升了任务响应效率与开发灵活性。同时,开源硬件、共享数据集及低代码工具的普及,进一步降低了研发门槛,推动机器人技术从单机智能向群体协作跃迁。本文将系统梳理这一技术演进路径,探讨具身智能的未来图景与发展机遇。
01
硬件割裂之痛:机器人协作的“巴别塔困境”
当前全球机器人市场呈现高度碎片化特征,仅工业机器人领域就存在超过20种主流通信协议(如Modbus、MAVLink、ROS等)。不同品牌、不同构型的机器人因接口不兼容,导致开发周期延长、成本激增。例如,某智能仓储企业为协调3种品牌机械臂的协议转换,需投入 8个月 进行定制开发。
硬件标准化缺失带来的核心问题包括:
•开发周期长:跨品牌设备协同开发需 6-12个月,而开源生态下可缩短至2-3个月;
•重复开发成本高:企业需为每类硬件定制驱动和功能模块,人力成本高达30人/月;
•功能扩展受限:90%企业需二次开发新功能,无法实现模块化复用。
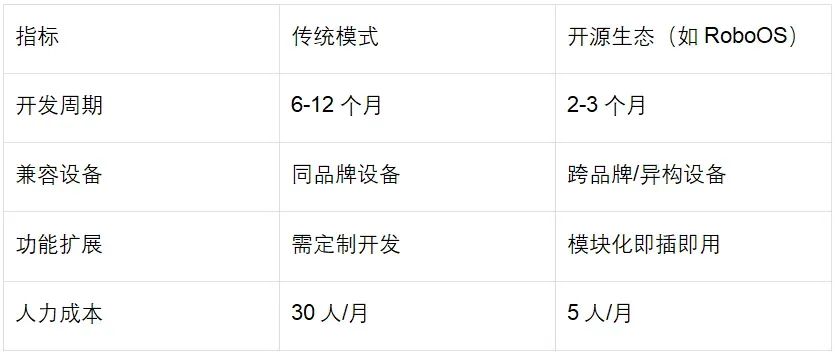
| 传统模式与开源生态对比
| 机器人协作困境图
02
RoboOS:跨本体协作的“神经系统”
智源研究院的RoboOS 通过“大脑-小脑”分层架构,构建了机器人协作的统一技术底座,其核心技术包括:
2.1
分层架构:大脑-小脑-数据中枢
•具身大脑(RoboBrain):负责全局感知与决策,支持多模态指令解析与任务分解。例如,将“递送苹果和水果刀”的指令拆解为导航、抓取、避障等子任务。
•小脑技能库:提供低延迟执行能力(响应延迟<10ms),支持抓取、导航等标准化技能。
•跨机器人数据中枢:实时共享空间记忆(如环境地图)、时间同步(任务优先级)和本体状态(如机械臂关节角度),形成全局协作网络。
2.2
核心功能亮点
•即插即用:支持 50+种硬件协议(包括Modbus、MAVLink、ROS等),适配松灵双臂、睿尔曼单/双臂、宇树人形等异构机器人。
•动态任务管理:可动态调整任务优先级,优化资源分配。例如,在紧急医疗场景中,药品AGV的运输任务可抢占其他低优先级任务。
•端云协同:云端部署的RoboBrain负责全局规划,端侧小脑执行实时操作,指令响应延迟低于 10ms。
| RoboOS架构示意图
2.3
典型应用案例:
上海瑞金医院应急响应系统
•消杀机器人(擎朗T7型):搭载超干雾化消毒模块与四盏紫外线灯,15分钟完成1000㎡区域消杀,病毒灭活率 99.9999% 。
•药品AGV(KUKA KMR iiwa型):±1mm定位精度运输药品,支持自主乘梯与动态避障 。
•手术器械机械臂(达芬奇Xi型):通过ISO 13485认证,7自由度机械臂完成微创手术器械递送,操作精度 0.1mm 。
通过RoboOS调度,应急响应时间从 45分钟缩短至8分钟,开发周期减少 80% 。
03
开源生态的“飞轮效应”:
从硬件到数据的全栈创新
开源生态通过标准化接口与模块复用,显著降低研发门槛并激发创新活力:
3.1
硬件开源:降低开发成本
•傅利叶N1人形机器人:全栈开源设计图纸与BOM清单,支持23自由度铝合金机身与FSA 2.0执行器,奔跑速度达 3.5m/s ,研发成本降低 50% 。
•DFRobot开源开发板:基于开源鸿蒙的H3 Hi3861 WiFi开发板,支持国产芯片与多协议通信,适配成本降低 60% 。
3.2
数据开源:加速算法迭代
•AgiBot World数据集:包含百万级真实场景数据 ,覆盖家居(40%)、餐饮(20%)、工业(20%)等场景,长程任务规模较谷歌Open X-Embodiment提升10倍 。
•ShareRobot数据集:提供高精度传感器数据(六维力传感器、视触觉传感器),支持毫米级精细操作(如插内存条、双机搬运)。
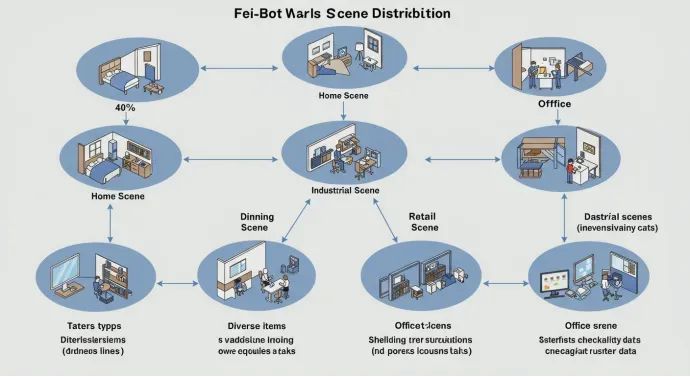
| AgiBot World场景分布
3.3
生态协同:打破技术壁垒
•深开鸿M-Robots OS:基于开源鸿蒙的分布式架构,支持200+种设备(工业机械臂、无人机、AGV)即插即用,通信延迟降至1微秒(较ROS提升三个数量级)。
•开发者工具链:拖拽式低代码工具使应用开发周期从数月压缩至72小时,新员工培训时间减少85%。
04
未来图景:从群体协作到环境智能
当硬件接口标准化率突破80%(预计2026年)时,将实现以下三大跃迁:
4.1
城市级协作网络
原理:硬件接口标准化率的提高,使得不同类型的机器人和设备能够更方便地相互通信和协作。在城市级协作网络中,物流机器人、家庭安防机器人和清洁机器人等设备可以共享数据和资源,形成一个统一的协作网络。
达到效果:
物流机器人动态组队分拣货物:标准化接口使得物流机器人可以在不同的分拣中心之间动态组队,实现高效分拣和运输,提高物流效率。
家庭安防与清洁机器人联动响应:家庭安防机器人和清洁机器人可以通过标准化接口共享数据,实现联动响应。例如,安防机器人检测到异常情况时,清洁机器人可以暂停工作,以便安防机器人进行处理。
4.2
自适应环境重构
原理:标准化接口使得无人机和地面机器人能够共享实时环境地图,并通过机器学习和路径规划算法进行协同作业。无人机可以快速获取大面积环境数据,而地面机器人可以进行更精确的局部操作。
达到效果:
无人机与地面机器人共享实时环境地图:无人机在空中拍摄和收集环境数据,生成实时环境地图,并通过标准化接口与地面机器人共享。
优化电力巡检路径:基于共享的环境地图,无人机和地面机器人可以协同规划巡检路径,减少重复工作,提高电力巡检的效率和覆盖范围。
4.3
智能涌现效应
原理:标准化接口提高了机器人之间的通信和协作能力,使得多个机器人可以协同完成复杂任务。这种协同效应可以激发智能涌现,即通过多个简单系统的协作产生更复杂的智能行为。
达到效果:
优必选 Walker S1 在汽车工厂实现多机协同装配:多台 Walker S1 机器人通过标准化接口进行数据共享和任务协调,实现多机协同装配。这种协同装配可以显著提高装配效率,减少人工干预,效率提升40%。

| 优必选Walker S1 在极氪 5G 智慧工厂进行协同装配
多机协同装配的优势:通过标准化接口,不同机器人可以共享装配任务的进度和状态信息,实时调整工作计划,减少等待时间,提高整体生产线的效率。
总结来说,硬件接口标准化率的提高将推动机器人和设备之间的高效协作,实现城市级协作网络、自适应环境重构和智能涌现效应,从而显著提升工作效率和智能化水平。
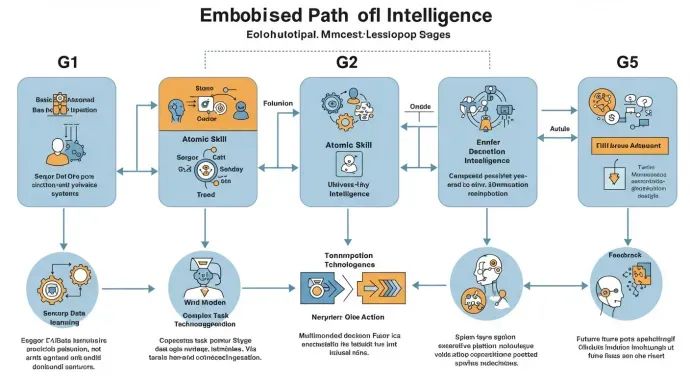
| 具身智能演进路线
具身智能演进路线分为G1 到 G5 五个阶段,每个阶段都有不同的侧重点和目标,具体如下:
G1:基础阶段
内容:基础数据采集和处理,使用简单算法。
目标:收集和整理基本数据,为后续的智能处理打下基础。
G2:感知与微技能阶段
内容:通过传感器感知环境信息,形成原子技能,如感知、抓取、视觉识别等。
目标:在感知的基础上实现基本技能单元的自动化。
G3:复杂任务与技术阶段
内容:处理复杂任务,涉及多技能协同。
目标:解决更复杂的问题,需要更高层次的协调和决策。
G4:进化决策智能阶段
内容:结合进化策略进行深度学习优化,实现更智能的决策。
目标:通过进化算法提高决策能力和学习效率。
G5:具身智能阶段
内容:将所有技能和能力进行整合,实现全面的具身智能,具有高度自主性和适应性。
目标:达到能够自主感知、学习、决策和行动的完整智能系统。
每个阶段在技术、算法和应用场景上都有所不同,演进路线体现了从简单到复杂、从基础技能到自主决策的逐步发展过程。
05
结语:协作新纪元的开启
从协议割裂到接口统一,从数据孤岛到群体协作,RoboOS等开源框架正在打破硬件壁垒,推动机器人从“能走”迈向“走得快、走得稳”。未来,随着开源生态的持续繁荣,机器人将不再受限于单一形态或场景,而是以更低的成本、更高的效率融入人类社会的每个角落。我们正站在一个全新的起点上,迎接一个智能协作无边界的未来。

推荐阅读





×
右键可直接复制图片