 阅读时间大约6分钟(2176字)
阅读时间大约6分钟(2176字)
2025-05-27 继人形机器人本体之后!“灵巧手”也出现资本态度分歧!下一步要怎么走?
来源:具身智能大讲堂
在热闹的表象之下,灵巧手行业正面临着技术路线之争、商业化困境以及估值体系缺失等挑战。
作者:李鑫 出品:具身智能大讲堂
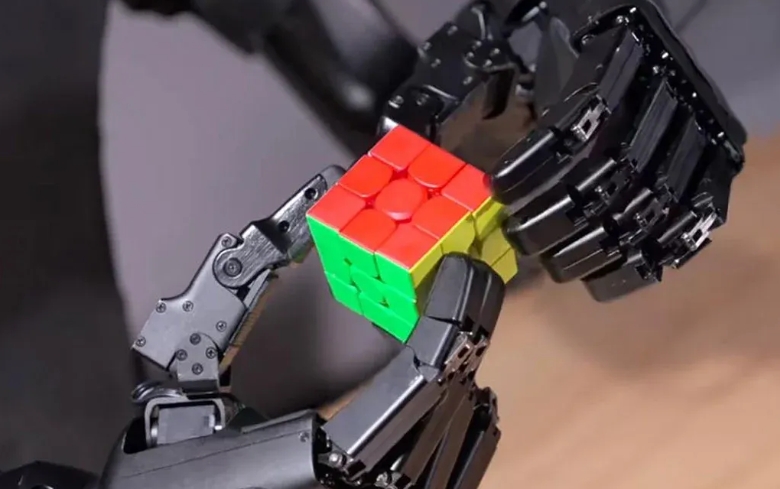
人形机器人末端执行器灵巧手,被称为人形机器人“最后一厘米”的关键部件,正逐渐成为资本竞相追逐的焦点。然而,在热闹的表象之下,灵巧手行业正面临着技术路线之争、商业化困境以及估值体系缺失等挑战。
资本热度蔓延 灵巧手成投资新宠
人形机器人的产业链复杂且庞大,涵盖上游核心零部件如电机、减速器、控制器、丝杠,以及末端执行器灵巧手等环节。如今,资本市场的热度正从本体厂商逐渐蔓延至上游零部件领域,灵巧手模块更是成为备受资本追捧的细分赛道之一。

图片来源于:星河频率
从今年来看,灵巧手行业融资消息不断。国内头部企业灵心巧手于4月8日披露了超亿元的种子轮融资,这是该行业目前金额最大的种子轮融资,其核心成员多来自达闼机器人。4月29日,因时机器人完成近亿元B3轮融资;5月14日,上海傲意信息科技有限公司完成近亿元B++轮融资,且此次融资距离上一次仅过去3个月,可见资本对灵巧手行业的青睐。
灵心巧手相关负责人透露,与去年相比,今年公司销量实现跨越式增长,订单来源广泛,既有高校和科研机构,也有荣耀、美的等知名企业。
技术路线分化与迭代加速
灵巧手的研发难度丝毫不亚于人形机器人本体。一个灵巧手的自由度基本相当于一个机器人的自由度,若加上手掌,人手的自由度有21个,灵巧手要达到类人效果,只能提升自由度,但这又会导致稳定性下降,如何平衡二者成为关键难题。

目前,市面上专注灵巧手研发的公司主要有四种技术路线:连杆、腱绳、连杆+腱绳和舵机。连杆路线刚度高、稳定性好,但实现高自由度困难;腱绳模式追求高自由度、响应快,但稳定性欠佳。在行业发展初期,各种技术路线并无明显优劣之分,但自去年年底以来,各公司方向逐渐清晰,产品迭代速度加快。例如灵心巧手在高自由度方面表现突出,其Linker Hand系列手工业版自由度可达25 - 30个、单指最高能独立实现9个自由度并360度自由旋转;傲意科技则在仿生领域持续突破,产品小巧灵活,类人设计明显。
随着行业发展,各公司研发方向更加务实,追求高自由度成为核心目标。同时,能做灵巧手的公司增多,主动寻求合作的公司也越来越多。、
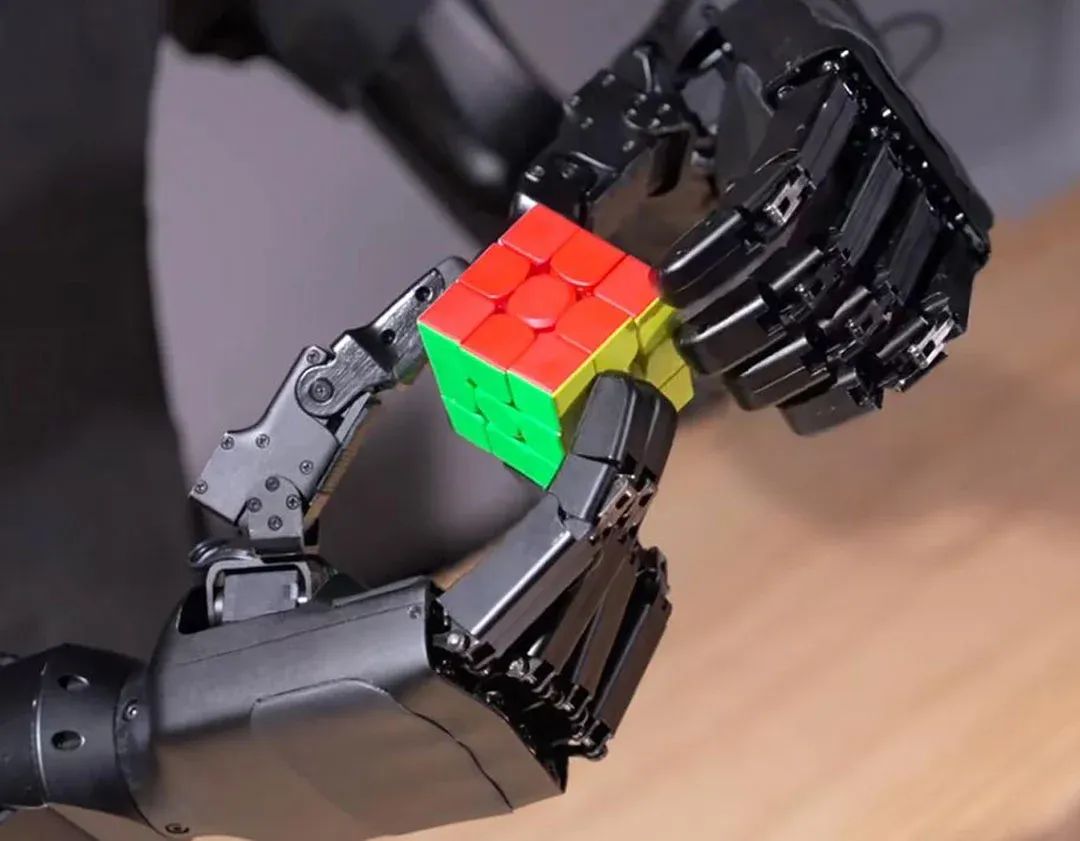
从市场现状来看,人形机器人本体公司纷纷推出灵巧手产品,初创公司加速融资步伐,上市公司也开始开拓灵巧手业务。如今年4月1日,宇树科技发布Unitree Dex5灵巧手,单手具备20个自由度,搭载94个灵敏触点,能灵活完成抓取橙子、打扑克、拧魔方等动作;因时机器人和灵心巧手相继拿到融资;恒辉安防在机器人灵巧手腱绳设计与开发方面与多家领先企业多频对接。
软硬件瓶颈制约商业化进程
灵巧手的技术水平目前落后于人形机器人本体,高自由度和稳定性难以兼顾是主要技术困难之一,在硬件和软件算法方面都面临巨大挑战。例如,对于人类而言轻松抓取的咖啡杯、玻璃杯、矿泉水等物体,灵巧手需要根据物体的体积、摩擦系数等计算抓取力度,涉及场景任务理解、数据学习、操作技能学习等多个维度。
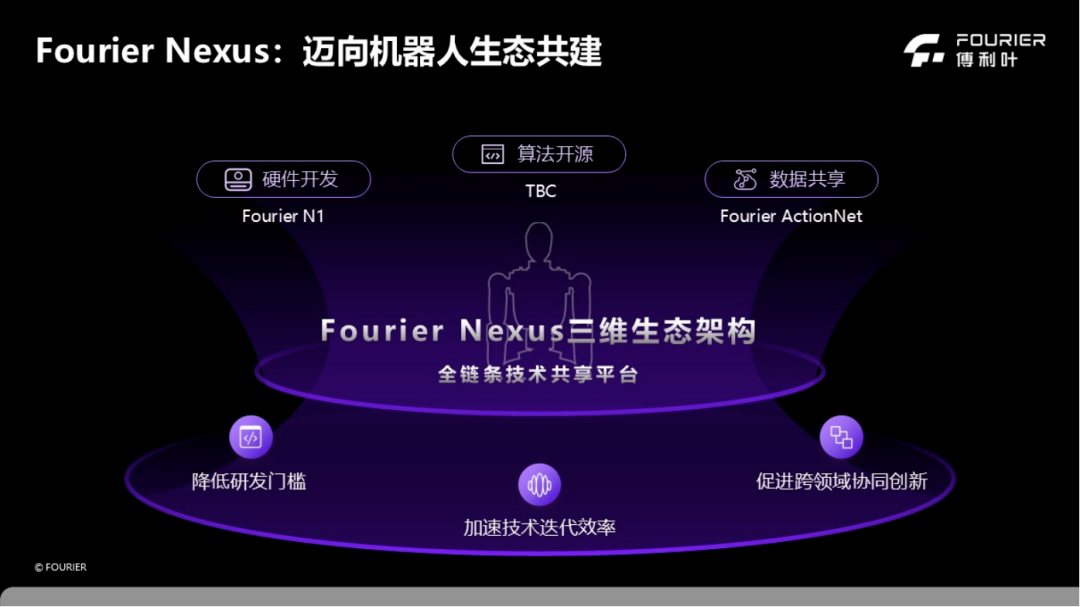
本体整机厂商也在积极推动灵巧手技术进步。今年3月17日,傅利叶开源全尺寸人形机器人数据集Fourier ActionNet,并发布全球首个全流程工具链,为灵巧手技术研发提供数据支持。但灵巧手不仅需要解决数据不足、软件优化等问题,硬件方面同样需要突破。
灵巧手技术研发难度主要体现在稳定性、手指负载能力和维修成本等方面。其内部结构精密复杂,保持高精度工作状态困难;在小体积下提升手指负载能力不易;损坏后维修成本高,寿命也是产品设计的重要考量因素。此外,电机只是驱动灵巧手的第一个输入来源,灵巧手的抓取需要手眼配合,视觉传感器与触觉传感器协同作业,但目前触觉传感器发展处于早期,产业技术尚未成熟。
北京他山科技研发副总裁侯广东指出,在与灵巧手企业合作中发现,触觉传感器和视觉传感器发展阶段不一致,标准、数据、格式不统一,希望未来能与上游企业共同推动触觉传感器标准的制定,打通行业数据。
在资本市场,企业为赶上人形机器人热度纷纷发布灵巧手产品,但市场存在不确定性。如产业链相关企业兆威机电发布注重高精度与仿生性的灵巧手产品,但相关机构却给出了风险提示。恒辉安防称在机器人灵巧手腱绳材料方面取得研发进展,但也表示相关技术产品尚处于持续开发与市场开拓阶段,暂未形成销售订单,且下游市场存在不确定性。
估值体系缺位,投资决策存分歧
灵巧手行业的热度不断攀升,但在投资界,对于是否投资灵巧手存在较大分歧。今年3月,大部分投资人对机器人整机厂商投资意愿较大,甚至出现知名公司投不进去的现象,但在灵巧手行业,目前并未出现类似情况。

其中某投资机构负责人表示,灵巧手在技术突破和商业化落地方面不确定因素高,能做出样品但商用化前景不清晰,目前夹爪可完成一些任务,使用灵巧手的场景尚未明确,且具备稳定客户群体和出货量的公司难找。在她看来,投灵巧手更关注企业的订单量、稳定客户群体和成本管控能力,即更关注短期收益,而目前市面上具备这些能力的公司并不多。相比之下,投人形机器人更关注未来想象空间。
不过也有投资机构持相反观点,该机构认为人形机器人要适应人类社会所有场景形态,灵巧手等末端执行器的突破至关重要,这个赛道前景广阔。而且在本体厂商投不进去的情况下,转投零部件赛道是不错的选择。

从已披露的融资情况来看,灵心巧手和因时机器人的融资均超过亿元。部分投资机构看好灵巧手赛道的想象空间,但也坦言目前存在泡沫,且各公司之间技术实力差异不显著,缺乏标准标的公司,大家基本是按照自己的理解讲述公司未来,提升估值。
结语与未来
相比人形机器人领域,灵巧手作为具身智能细分赛道,同样面临一定的挑战,但我们也应该清楚,这种挑战是在技术爆发前必经阶段,更需要资本对于技术落地的耐心。对于灵巧手行业来说,未来需要在技术研发上持续投入,突破高自由度与稳定性的平衡难题,加快硬件和软件算法的升级。同时,加强行业标准制定,推动触觉传感器等关键部件的发展,提高产品的可靠性和稳定性。

推荐阅读





×
右键可直接复制图片