 阅读时间大约4分钟(1245字)
阅读时间大约4分钟(1245字)
2025-06-11 ETH打造!作业能力85公斤!LEVA打破轮足机器人货运动态负载记录!
来源:具身智能大讲堂
城市物流的“最后一公里”。
作者:李鑫 出品:具身智能大讲堂
今年4月底中国四足机器人企业云深处推出的山猫M20机器人,已初步验证了轮足结构在物流配送场景中的技术潜力,为该领域商业化探索提供了新思路。不过从全球市场来看,布局物流赛道的轮足机器人研发企业并非仅云深处一家。
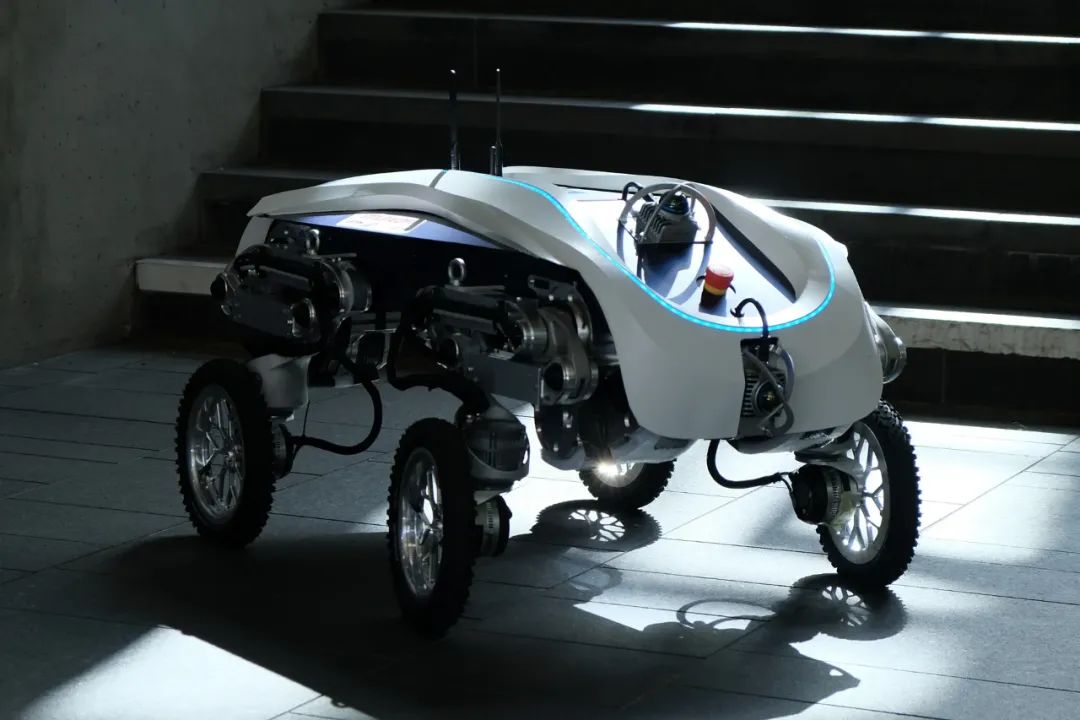
近日,由瑞士苏黎世联邦理工学院、苏黎世应用技术大学及苏黎世艺术大学联合组建的工程师与设计师团队,正式发布了一款多地形轮足机器人LEVA。该机器人核心优势在于实现了全流程自主化搬运:其机械臂与载重平台协同设计,可独立完成85公斤级货箱的抓取、运输及卸载任务,且全程无需人工干预。
85公斤大负载能力 LEVA有望改变物流终端配送格局
RIVR是苏黎世联邦理工学院(ETH)的衍生企业,公司成立于2022年,总部位于苏黎世,专注于开发“物理人工智能”(Physical AI)技术。

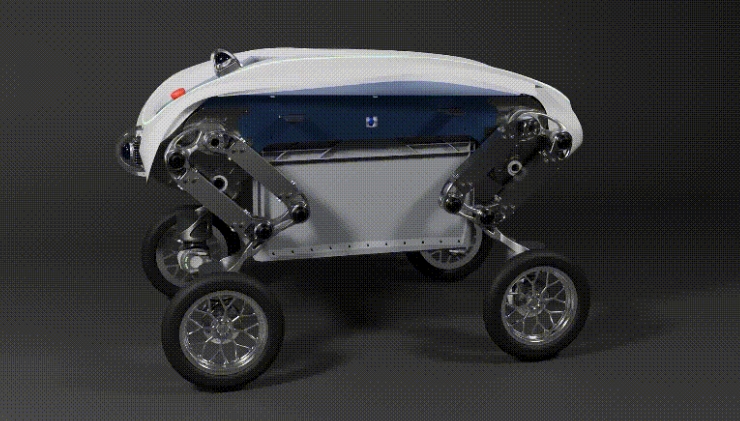
此前,该公司已经生产了四足机器人 RIVR ONE,用于解决城市物流的“最后一公里”问题,与 RIVR ONE 相似,LEVA 同样配备了四条关节腿。不过,LEVA 在设计上进行了创新优化,其每条腿的末端并非传统意义上的“脚”,而是安装了电动轮。
官方数据显示,LEVA机器人在轮足状态下,时速达8公里,能耗较传统轮式机器人降低30%,遇到楼梯或崎岖地形时,腿部关节锁定车轮切换至步行模式,可攀爬30度斜坡。轮式与足式运动的双重优势,使其能够灵活适应多种复杂地形。
感知与导航方面,LEVA搭载GPS、LiDAR激光雷达及五台分布式摄像头(四边环绕+底部定位)。LiDAR构建三维环境地图,摄像头通过算法识别货箱与障碍物,结合SLAM技术实现厘米级路径规划,障碍物闪避成功率达98%。底部摄像头与转向轮协同作业,货箱定位精度±2厘米,抓取成功率超95%,确保物流作业高效精准。
LEVA作为RIVR ONE的迭代升级产品,其核心优势在于强化了智能搬运功能。相较于RIVR ONE,LEVA具备自主识别、精准定位、路径规划及货物运输的一体化能力,可独立完成从货物发现、行驶至目标位置、抓取到运输的全流程作业。

尤为突出的是,LEVA的机械腿与载重平台经过优化设计,能够稳定抓取并运输重达85公斤(约187磅)的欧式标准货箱,这个作业数据在轮足机器人大负载自主搬运任务当中全球第一。
LEVA通过三组摄像头实现环境感知,机身左右两侧各配置一台垂直安装的高清摄像头,底部搭载一台全景摄像头,能够获取三维空间信息并识别障碍物。其全向轮式底盘支持每个轮子独立转向,可实现任意方向的直线移动或原地旋转,适应复杂地形。
当LEVA机器人定位至目标货箱正上方时,液压驱动的四足关节协同工作,使机身平稳下降。内置的智能抓取机构(如电磁吸附或机械卡扣)自动锁定货箱顶部,确保运输稳定性。完成抓取后,机器人通过液压系统抬升机身,并依据预设路径导航至目的地。
结语与未来
RIVR团队目前正重点提升LEVA机器人的环境感知能力、运动控制精度及复杂负载下的稳定性。由于物流场景测试需覆盖极端天气、高密度障碍物等多样化条件,且安全验证需符合多国行业标准,其商业化落地时间仍需根据实际测试进度动态调整。
末端物流自动化领域已出现两类主流技术路径:一是以无人机为代表的低空配送方案,其优势在于快速跨越地理障碍,已在部分国家实现区域性商业化运营;二是以LEVA为代表的地面轮足机器人,侧重解决“最后一公里”中的复杂地形适应性难题(如室内外无缝衔接、楼梯攀爬等)。随着LEVA在硬件(如动力系统效率、传感器冗余设计)与软件(如动态路径规划算法、多机器人协同调度)层面的持续优化,其技术优势将进一步得到释放。

推荐阅读





×
右键可直接复制图片