 阅读时间大约4分钟(1211字)
阅读时间大约4分钟(1211字)
2025-06-12 柔性硅胶在机器人领域的关键应用
来源:机器人新材料
因优异的柔顺性、生物相容性与加工适配性,柔性硅胶正在成为新一代机器人系统中不可或缺的构成元素。
出品:机器人新材料
随着机器人从传统工业自动化逐步走向医疗辅助手段、人机交互、服务陪护等复杂环境,刚性结构在灵活性、安全性、适应性的表现已逐渐失去优势。柔性材料,尤其是柔性硅胶(Flexible Silicone Rubber),因优异的柔顺性、生物相容性与加工适配性,正在成为新一代机器人系统中不可或缺的构成元素,尤其在仿生机器人、柔性执行器、触觉界面和人机交互皮肤系统中,扮演着关键角色。
柔性硅胶的关键技术特性
柔性硅胶通常指以聚硅氧烷(PDMS,聚二甲基硅氧烷)为基础,通过调控交联度和添加助剂实现力学性能调整的弹性体。在机器人中的优势体现在以下几个方面:
邵氏硬度:可调至Shore 00级别,接近人类肌肤柔软度
拉伸/压缩强度:优良(>6 MPa),适用于反复形变结构弹
性恢复:快速恢复原状,疲劳寿命优异热
稳定性:可耐温 -50°C 至 +200°C电
绝缘性:电阻率高(10⁹~10¹⁴ Ω·cm),适用于传感/执行隔离场景
生物相容性:高度安全,广泛用于医疗/穿戴设备
典型应用场景
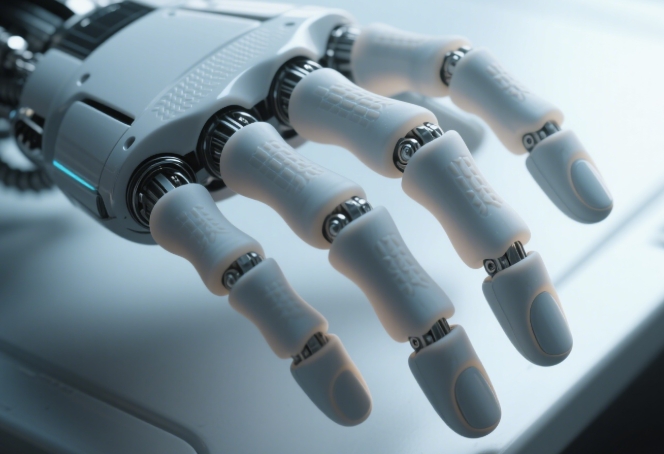
1. 柔性仿生手指与皮肤
柔性硅胶因为可以通过3D打印或模压成型精准模拟人类皮肤或软组织结构,在人形机器人和康复机械手中被广泛应用。斯坦福大学研发的软体机械手结构中使用双层复合硅胶包裹气动骨架,实现高精度抓握。
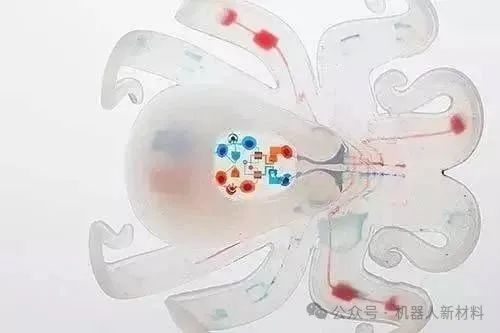
2. 软体机器人驱动结构
软体机器人(Soft Robots)多采用流体或气压驱动,硅胶被用于制作密闭腔体、波纹管或关节外套。著名案例包括哈佛大学的Octobot章鱼机器人,全结构均由硅胶打印而成,具备极高柔性与抗扭转性能。
3. 仿生触觉与人机交互界面
柔性硅胶可与电容式、压阻式、液态金属电路等形成集成传感系统,实现“电子皮肤”(e-skin)构建。在仿生手和人形机器人中尝试将柔性硅胶包覆于关节及手掌区域,以提升人机接触的安全感与自然度。
4. 医疗机器人与穿戴辅具
在康复类机器人、下肢外骨骼等场景中,硅胶制成的“气动肌肉”“紧贴护具”提供了安全舒适的力传递界面。据官方资料,Cyberdyne HAL在接触人体时采用软性材料,有效减少长时间佩戴的压迫伤害。

图片来源:Cyberdyne
制造与工程挑战
尽管柔性硅胶具备理想的力学与生物特性,但在机器人系统中的工程应用仍有局限:
尺寸稳定性差 & 易形变
长时间受力或温度波动易产生蠕变和永久变形,影响结构精度。
难以实现高强度结构连接
与刚性零件连接困难,易产生应力集中区,需采用粘结剂或界面层设计。
导电/传感功能需复合化处理
本体绝缘,需嵌入导电墨水、碳纳米管、液态金属以实现信号感知或驱动。
加工重复性受限
模压、灌注等方式对环境和工艺控制要求高,工业批量成型仍存在一致性瓶颈。
发展趋势与研究方向
多材料3D打印一体成型
硅胶与导电材料的协同打印,可构建“结构+传感+驱动”的一体化系统。
智能化硅胶复合材料
加入光致变色、温敏、磁响应微粒,形成可自愈、变形记忆、自监测的新型柔性体。
界面工程技术突破
通过硅烷偶联剂、等离子处理、结构嵌合等方式增强柔性-刚性之间的连接强度。
国产化医疗级硅胶体系完善
特别是在机器人与人体接触场景(如康复辅助、护理陪伴)中,对高纯度、低迁移、无毒性硅胶的依赖将催生本土化创新。柔性硅胶在机器人技术中正逐步从“包覆材料”转向“关键功能模块”的地位。柔性、仿生、可加工性特征使它成为软体机器人、人形机器人和医用辅具中不可或缺的材料基础。然而,要实现在大规模机器人平台中的普及,仍需在多材料协同制造、界面结构设计与标准化体系等方面持续突破。

推荐阅读




×
右键可直接复制图片