
 阅读时间大约4分钟(1272字)
阅读时间大约4分钟(1272字)
2025-06-26 1000牛推力!800摄氏度火焰!全球首款飞行人形机器人来了!
来源:具身智能大讲堂
近日,由意大利理工学院人工智能与机械智能小组主导的iRonCub3项目取得重要突破。
作者:李鑫 出品:具身智能大讲堂
近日,由意大利理工学院人工智能与机械智能小组主导的iRonCub3项目取得重要突破。该机器人以类儿童双足机器人iCub(专为人工智能研究设计)为基础平台,通过背部加装喷气推进装置与手臂集成喷火模块,成功完成首次稳定起飞及短时悬停测试。
项目团队通过喷气动力系统,实现人形机器人的空中机动能力,为后续复杂环境下的自主作业奠定技术基础。
1000牛推力!800摄氏度火焰!iRonCub3成为全球首个具备完整飞行能力的人形机器人
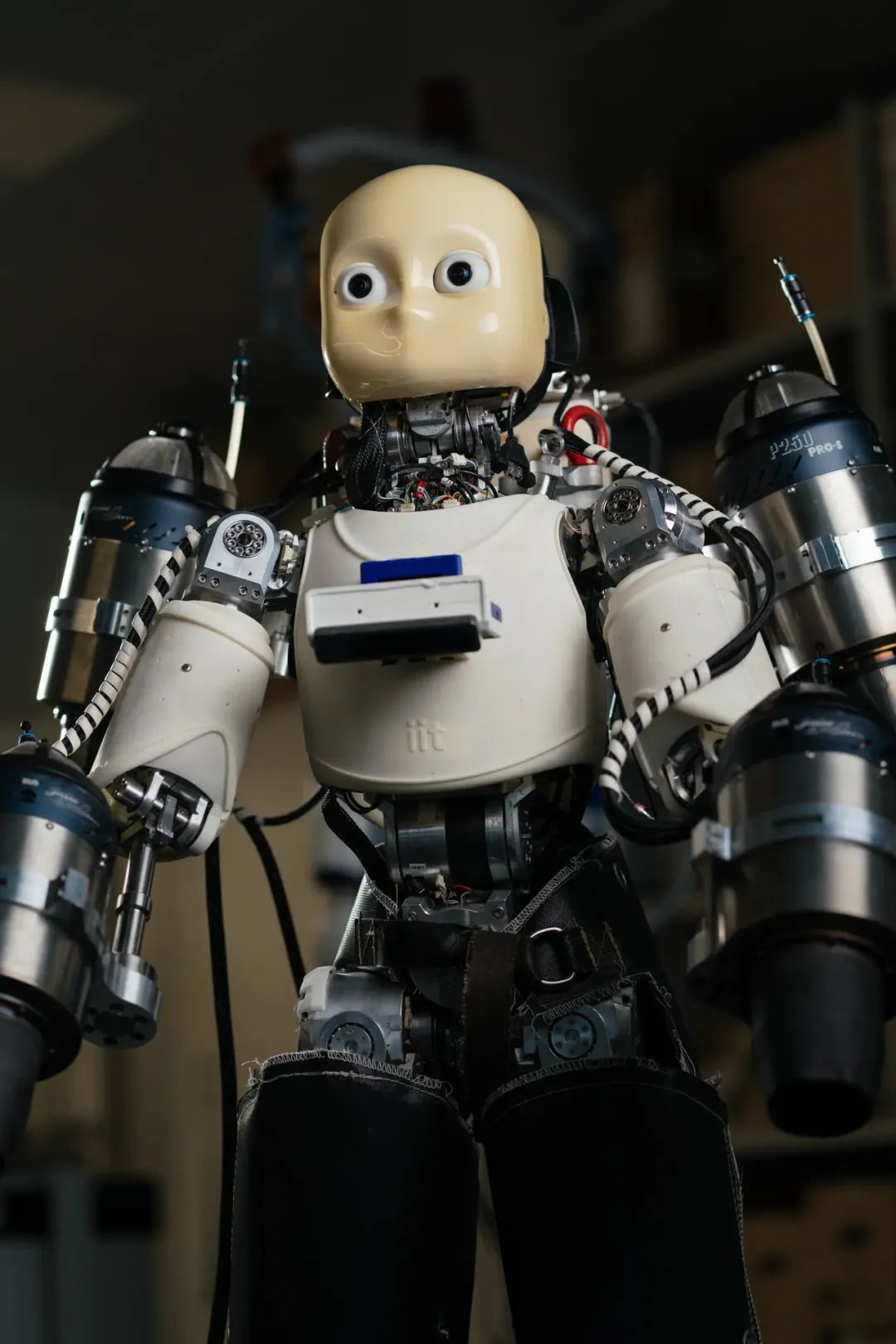
iRonCub3是专为快速灾难响应场景设计的人形机器人,其背部搭载双喷气背包系统。研发团队将原版机器人的灵巧手替换为JetCats喷气模块,该模块最大推力为1000牛(约225磅力),排气温度上限达800℃(1472℉)。
相较于iRonCub早期版本,iRonCub3实现了从分系统验证到完整系统集成的突破。早期版本主要针对喷气背包设计、控制算法及空气动力学特性进行独立测试,而iRonCub3首次整合了飞行动力、关节驱动与智能控制系统,形成具备完整飞行能力的人形机器人平台。
在硬件设计方面,iRonCub3进行了三项改进:
1、结构优化:采用钛合金脊柱与耐高温外壳,替代早期原型机的柔性防护结构。
2、系统集成:重新设计电子架构,在喷气背包中集成力矩传感器,并移除冗余组件以提升空间利用率。
3、动力学适配:前臂结构通过有限元分析优化,确保符合飞行动力学要求。
控制技术层面,iRonCub3配备多速率控制架构,包含针对喷气发动机与关节非线性特性的模型预测控制器。
截至去年8月,该机器人已在风洞中完成多次气动性能测试,验证了其动力学模型准确性。此后,研发团队进一步开发了基于多部件互连系统的控制模型,以及基于人工智能的气动力实时估算算法。
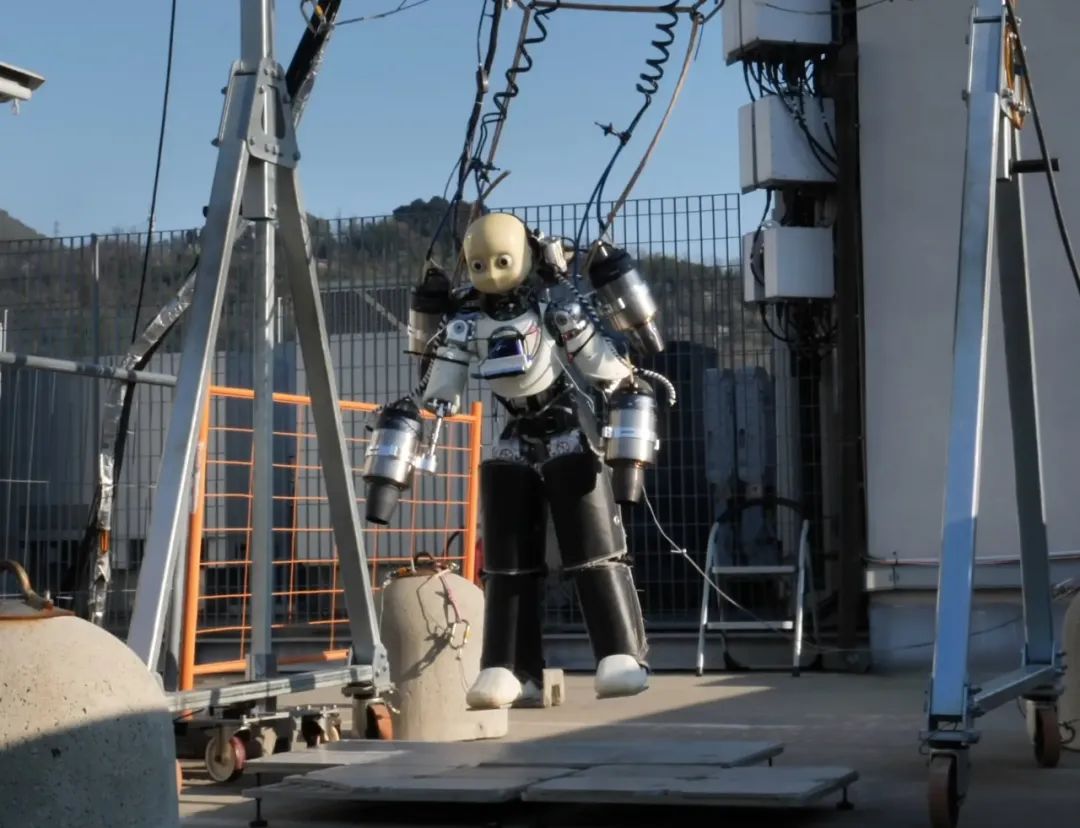
iRonCub3原型机首次升空!70公斤重量实现稳定悬停!
从测试视频中可见,iRonCub3原型机(含喷气发动机)总重70公斤(154磅),已实现稳定起飞与短时悬停。尽管单次飞行时长有限。

研究人员表示,想要达成这样的效果并不是一件容易的事情。由于机器人具备多关节可动结构与可变形机身,其飞行控制需协调动态平衡与姿态调整,一定程度上增加了基于人工智能的控制系统设计难度。

项目成员Antonello Paolino介绍,团队通过融合模拟数据与实验数据训练神经网络模型,并将其深度集成至控制架构中,从而在硬件层面(包括惯性测量单元、力矩传感器及RealSense深度摄像头)与软件层面协同优化,确保机器人在发动机顺序点火、机身形变等非平稳工况下仍能维持姿态稳定。
目前,该项目已在意大利理工学院完成初期开发与场地测试。随着研发推进,团队计划拓展实验规模。目前团队已与热那亚机场达成合作,未来将利用其空域资源开展更大范围的飞行验证。
“这项研究显著区别于传统类人机器人技术,推动我们在技术层面实现了突破性进展。”团队负责人Daniele Pucci解释道,“在iRonCub3项目中,热力学是核心挑战之一——涡轮机排放气体温度高达700摄氏度,流速接近音速,这对空气动力学建模提出了实时评估的严苛要求。与此同时,控制系统需同步协调慢速关节执行器与高速喷射涡轮机的动态响应,两者在时间尺度上的巨大差异进一步加剧了控制难度。因此,测试过程既充满技术探索的乐趣,也伴随极高的风险,任何环节都需严格遵循预设方案,容不得半点即兴操作。”
项目的终极目标是构建具备快速部署能力的类人机器人平台:机器人可自主飞抵灾难或紧急现场执行空中侦察,实时回传关键数据;落地后则切换至地面移动模式,完成越障、爬梯、开门等复杂任务。这种“空地协同”的适应性使其在危险建筑检测、基础设施评估等场景中具备更高的应用价值。

推荐阅读





×
右键可直接复制图片