 阅读时间大约1分钟内(119字)
阅读时间大约1分钟内(119字)
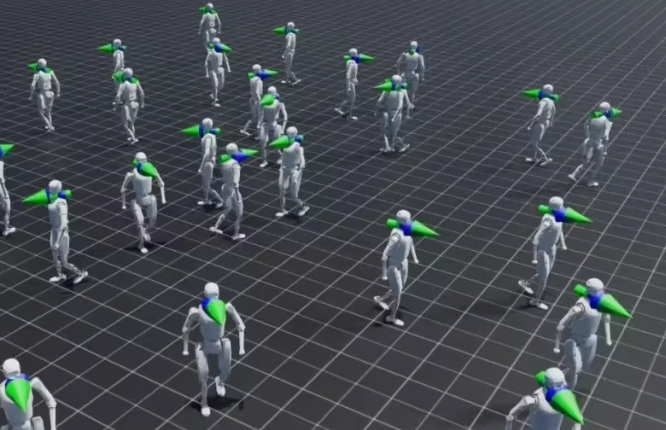
2025-07-08 北京人形机器人创新中心发布运动控制框架Tien Kung-Lab
来源:北京人形机器人创新中心
将机器人马拉松冠军的运控算法面向行业开源。
具身研习社 7月8日消息,北京人形机器人创新中心正式发布开源运动控制框架 Tien Kung-Lab,将机器人马拉松冠军的运控算法面向行业开源,填补高性能人形机器人运动控制框架在开源领域的空白,为工业场景、物流场景与特种作业场景等高复杂环境下规模化应用提供核心基础技术支撑。
推荐阅读




×
右键可直接复制图片