
 阅读时间大约9分钟(3557字)
阅读时间大约9分钟(3557字)
2025-07-24 IEEE TRO 一种受蝗虫启发的机器人,可通过优化的过渡控制实现连续爬行-跳跃-滑行运动
来源:豆包
Index Terms-仿生机器人、跳跃式滑翔机器人、机构设计、运动控制。
出品:CAAI认知系统与信息处理专委会
引用:Xu, Y., Zhang, W., Peng, L., Zhou, Q., Li, Q., & Shi, Q. (2024). A Locust-Inspired Robot Capable of Continuous Crawl-Jump-Gliding Locomotion With Optimized Transitional Control.IEEE Transactions on Robotics.
PART.00 文章信息
https://ieeexplore.ieee.org/document/10758220
DOI:10.1109/TRO.2024.3502192
PART.01 摘要
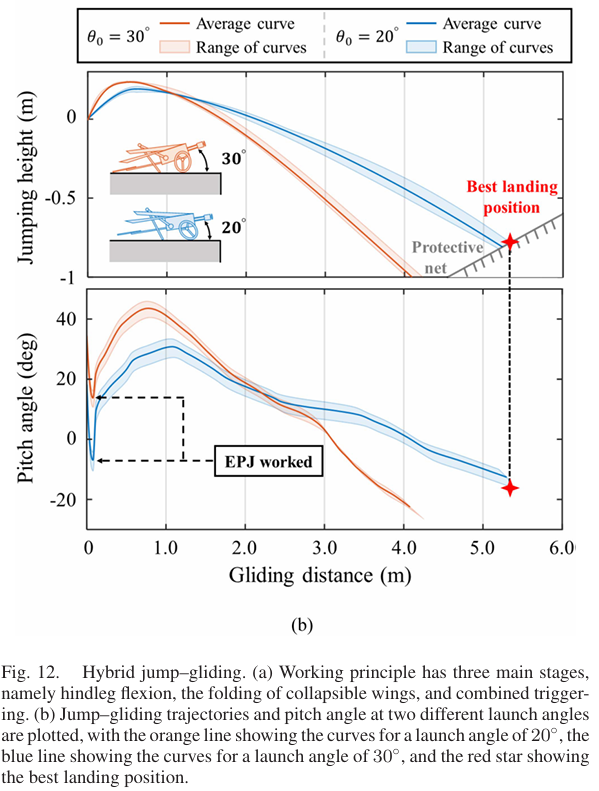
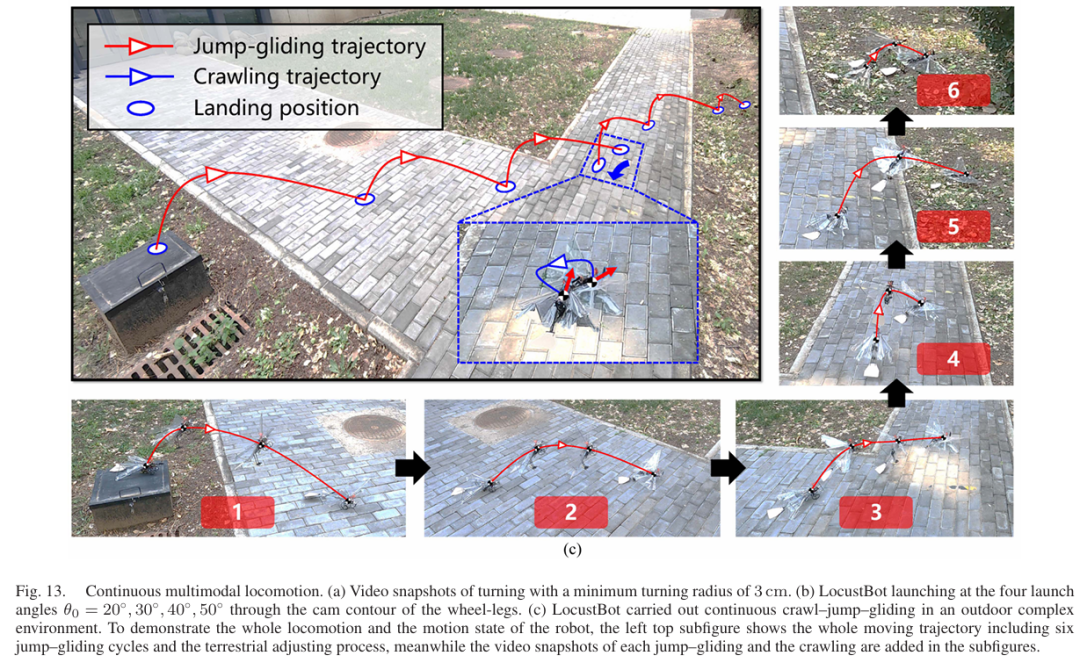
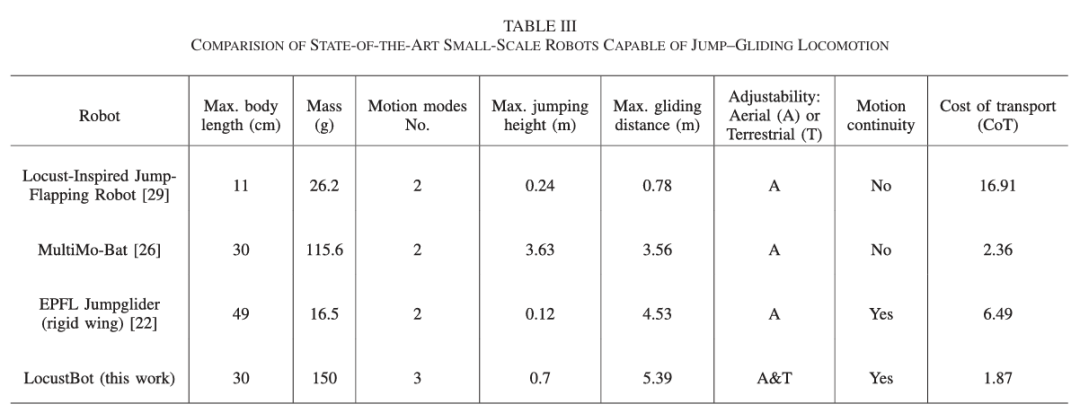
蝗虫具有多种运动模式,它们在陆地和空中领域不断切换,因此具有很高的环境适应性。已经开发了几种机器人来模仿蝗虫的跳跃滑翔运动,但由于小规模的结构和控制限制,它们的机动性和过渡稳定性受到限制。在这篇文章中,我们开发了一种小型蝗虫机器人(LocustBot),它不仅可以跳跃和滑翔,还可以爬行。我们提出了一种协调驱动的机制,允许LocustBot用很少的执行器进行跳跃式滑翔。为了实现稳定的长距离移动,使用基于强化学习的优化控制来生成并跟踪机器人从起飞到着陆的位置和方向。LocustBot的跳跃滑行距离达到5.39米,这表明了将弹簧驱动滑行与螺旋桨驱动滑行相结合的移动策略的高能量利用效率。值得注意的是,在没有高平台的情况下,机器人仍然可以通过在水平面上连续爬行跳跃滑翔来实现远距离移动,因此,其性能优于最先进的跳跃滑翔机器人。
Index Terms-仿生机器人、跳跃式滑翔机器人、机构设计、运动控制。
PART.02 背景与贡献
得益于高便携性和灵活性,小型机器人可以进入对人类操作员来说危险的极端环境,在搜索、救援和传感器部署任务中表现出出色的实用性。已经采用了几种运动模式,如爬行(轮式)[1]、[2]、跳跃[3]、[4]和滑翔[5],以提高它们的机动性和运动灵活性。在上述运动模式中,爬行赋予机器人灵活的移动或转弯能力,跳跃使机器人能够越过障碍物,滑动使机器人能够有效地延长其移动范围。然而,具有单一运动模式的机器人的机动性受到严重限制,这大大降低了环境适应性。
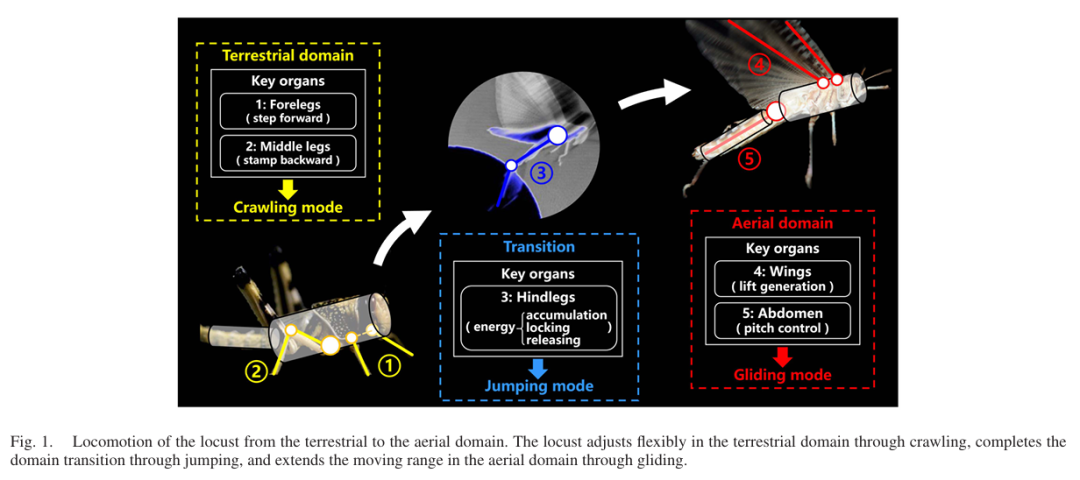
昆虫,如feas[6]、瓢虫[7]和蝗虫[8],已经进化出基于爬行甚至飞行(滑翔)的跳跃能力,以避免天敌的捕食。在这些昆虫中,蝗虫有各种运动模式,它们在这些模式之间不断切换,如图1所示。它们通过爬行[9]、跳跃[10]、[11]、滑翔[12]和灵活调节[13]在陆地和陆地领域都表现出高度的机动性和环境适应性。特别是,除了常见的扑翼机制外,蝗虫还可以巧妙地利用气流来控制展开和滑翔[14],这是我们研究的重点。然而,跳跃阶段不希望的扑翼总是会阻止蝗虫切换到滑翔模式。此外,跳跃和滑翔之间存在冲突,因为大的机翼面积会为长距离滑翔产生强大的升力,但也会产生强大的阻力,从而降低跳跃高度。蝗虫通过协调控制后腿、翅膀和腹部来克服上述困难[15],[16]。
受蝗虫的启发,赋予小型机器人跳跃能力[17]、[18]、[19],提高了它们的越障能力和敏捷性。此外,通过滑动来表达跳跃动作可以提高能量利用率,并显著扩大机器人的移动范围。采用不同的动作策略来模拟生物跳跃滑翔伞。
1) Kovac等人[20]、[21]、[22]和Desbiens等人[23]开发了跳跃式滑翔机,以证明翅膀可以延长跳跃机器人的移动距离。然而,这两种跳跃式滑翔机的设计没有考虑机翼的折叠,导致刚性机翼对跳跃的抑制。
2) Beck等人[24]开发了一种蝗虫式跳高器,采用翅膀和腿的两个电机来实现翅膀展开在跳跃稳定和站立方面的优势。然而,单独的致动策略会延迟机翼的效果,导致在整个上升阶段出现不希望的大攻角。
3)Woodward等人[25]、[26]、[27]、Baek等人[28]和Wei等人[29]巧妙地将跳跃和滑动机构结合在一起,但需要采用记忆合金或直线电机的额外触发装置,这给运动切换和连续移动带来了困难。
综上所述,由于紧凑的尺寸和有限的执行器,小型机器人系统很难模仿蝗虫在高能利用效率和连续机动性方面的跳跃。
从陆地到空中的稳定过渡对于跳跃滑翔运动也很重要。由于跳跃和空气湍流的不稳定加速,在过渡过程中通常会出现飞起和失速,导致跳跃能量无法维持。为了克服不稳定的过渡,Libak等人[30]提出,对于小尺寸的不稳定跳跃机器人,提高空中阶段的稳定性比提高起飞阶段的稳定性更重要。为了提高过渡过程中的稳定性,一些机器人通过螺旋桨产生的推力实现定向控制[31],另一些机器人通过翅膀保持平衡[24],还有一些机器人使用尾巴进行调整[32],[33]。然而,之前的研究只集中在空中稳定性控制上,而忽略了角速度迅速积累的陆地阶段。此外,一些研究[3]、[34]没有考虑防止跳投,只是增加了一种自我扶正机制来恢复着陆姿势。因此,确保起飞阶段的过渡稳定性仍然具有挑战性。
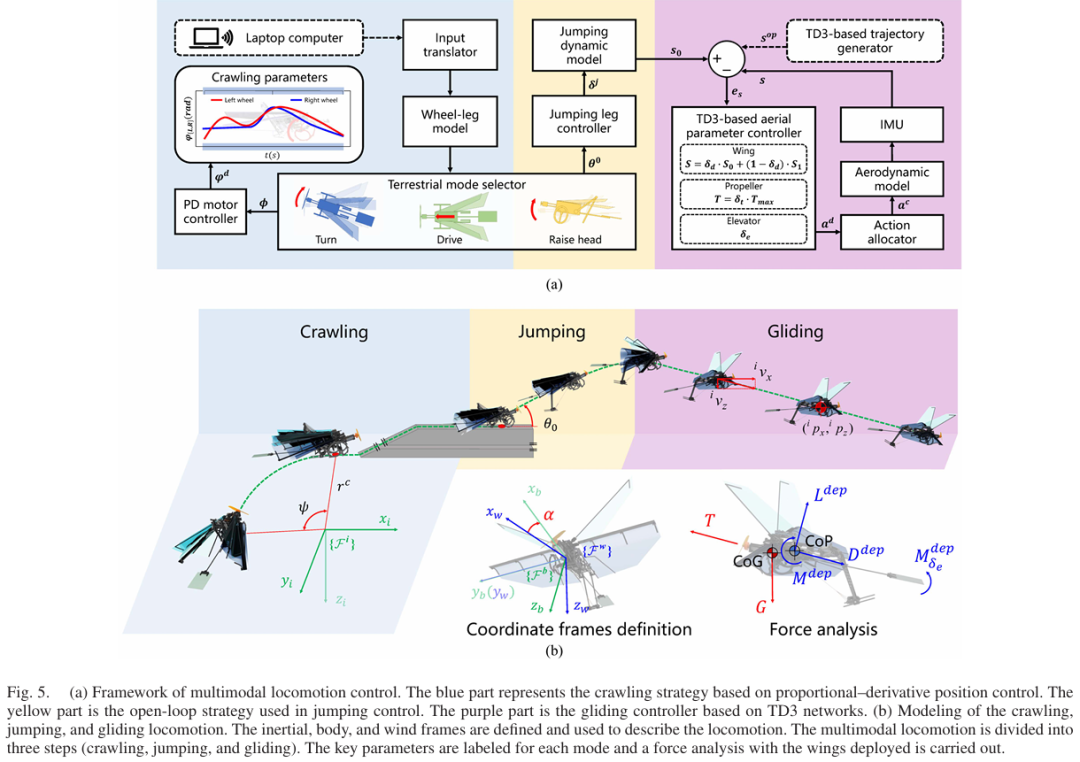
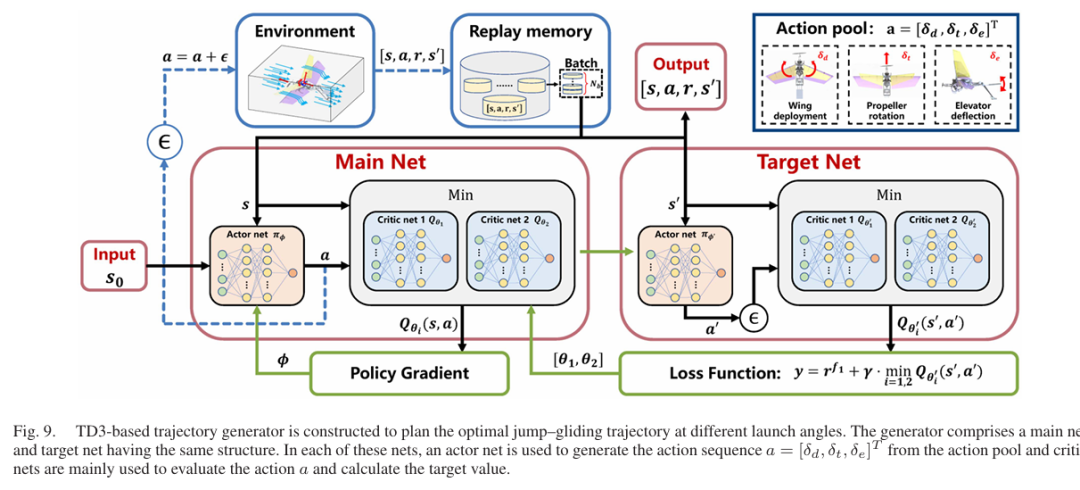
在这篇文章中,我们提出了一种能够进行连续跳跃滑翔运动的小型蝗虫启发机器人(LocustBot)。LocustBot有两个新颖的功能。1)精心设计了理论系统的机制,以实现多模共构。据作者所知,这是第一个具有三种运动模式(即爬行跳跃和滑翔)的蝗虫机器人。2)采用双延迟深度确定性策略梯度算法(基于TD3的强化学习),对机器人进行优化运动控制,实现长距离运动和稳定定向。
系统设计
为了获得高机动性和环境适应性,模仿蝗虫的敏捷跳跃滑翔运动和灵活爬行运动非常重要。然而,科学和工程挑战在于,系统设计需要使用较少的执行器集成多种运动模式,以提高能量利用效率。太多的执行器会增加机器人的重量和尺寸,降低其机动性,而太少的执行器则无法实现多运动模式。因此,开发仿生机器人系统的目标如下:1)要从地面领域移动到空中领域,必须将跳跃与滑翔运动相结合。跳跃式滑翔机器人需要重量轻以确保敏捷性,因此,该系统应该用更少的执行器协调驱动。
2) 蝗虫或机器人从陆地到空中的过渡通常是不稳定的。因此,提高飞机从起飞到着陆的稳定性具有重要意义。
3) 由于着陆状态未知,跳跃式滑翔机器人的运动连续性非常具有挑战性。因此,在保持着陆稳定性的同时,配备地面爬行可调性非常重要。
A.协调驱动跳跃滑行机构
为了实现从地面到空中的敏捷运动,集成跳跃和滑翔模式的机构设计需要轻便。一种策略是通过共享一个执行器来强烈地耦合跳跃和滑动机制。图2显示,协调驱动的跳跃式滑翔机构有两个关键结构,即后腿和可折叠机翼。
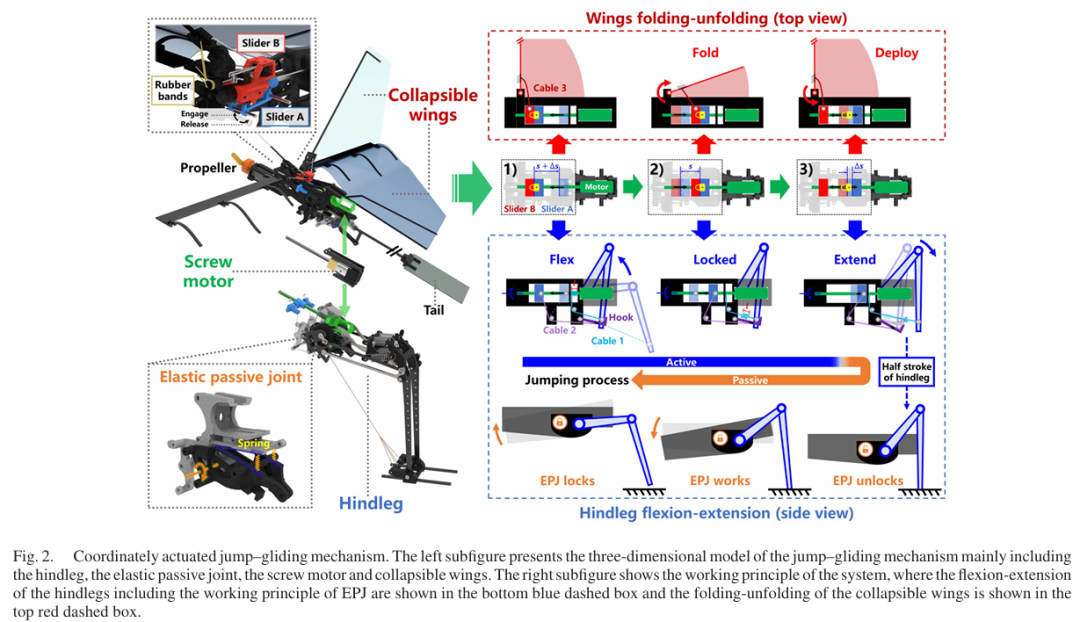
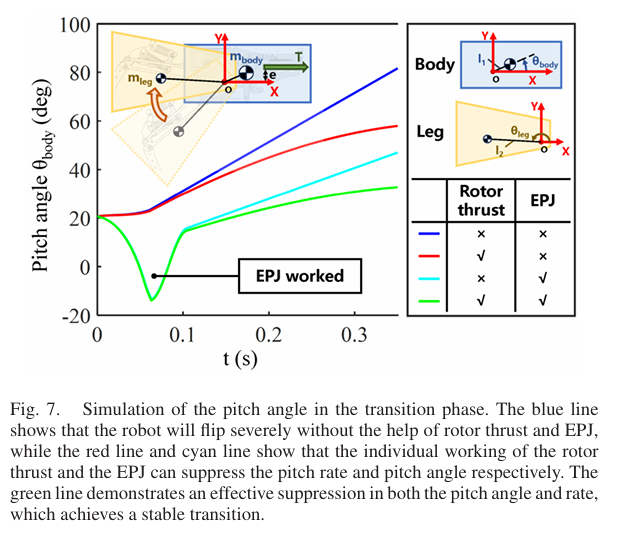
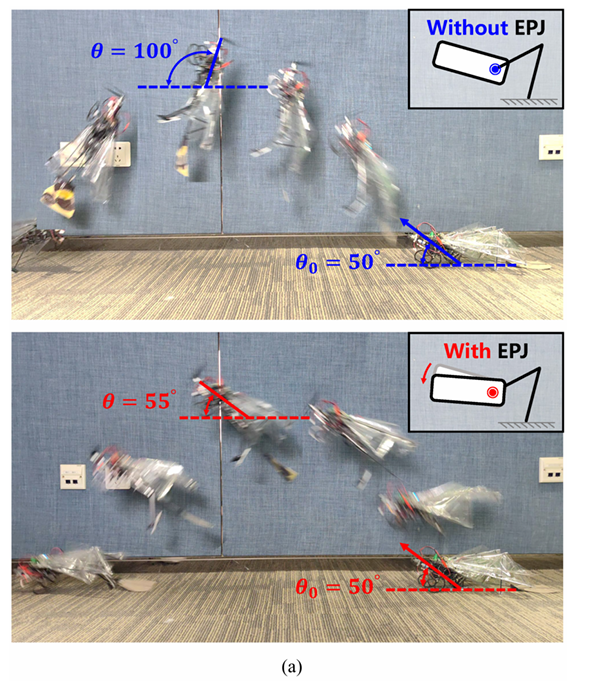
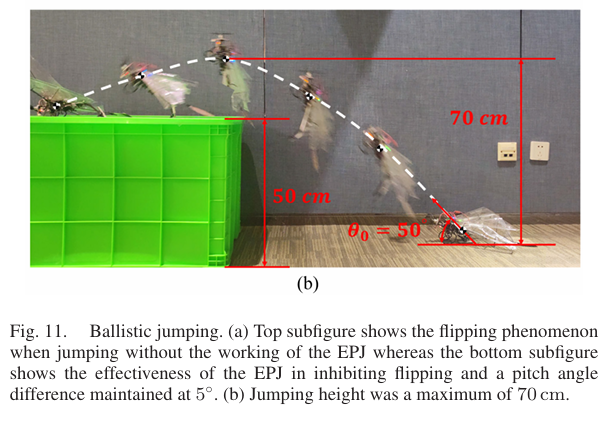
对于跳跃模式,我们根据之前的研究提出了一种改进的电缆驱动泵送机制[35],[36]通过电缆拉动腿端,力臂的长度大大增加,导致弹簧弹性能的积累更多。然而,在起飞阶段,这种能量在短时间内释放出来,通过地面反作用力和质心轨迹的偏差积累了大量角动量,导致无意识翻转。为了克服向空域的不稳定过渡,我们利用后腿根部的弹性被动关节(EPJ)(如图2左下框所示)与螺旋桨配合,以抑制翻转角速度。在螺旋桨产生的推力的帮助下,EP]延迟了发射后角动量的积累,从而提高了跳跃稳定性。
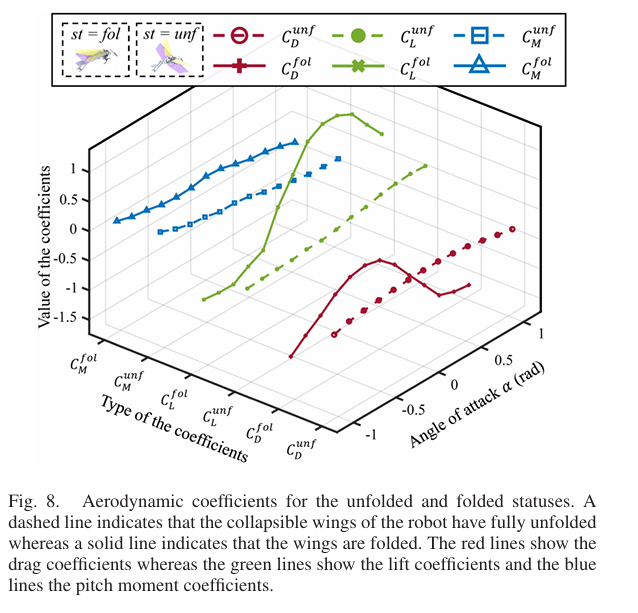
正如第一节的生物启发中提到的,蝗虫的滑翔策略对应于固定翼飞行器的工作原理,我们为滑翔机构构建了一对可折叠的翅膀、一个螺旋桨和一个尾部。为了消除跳跃和滑翔之间的冲突,可折叠的翅膀被设计成在跳跃过程中保持折叠,这减少了垂直阻力,然后展开以产生足够的升力,同时在滑翔过程中保持平衡。在模仿蝗虫能够调整方向的前翅[37]时,我们设计了一对二面角为20°的前翅,以提高横向和方向滑动稳定性[38]。此外,在纵向平面内调整空中方位的能力也很重要。因此,增加了一个能够产生推力的前螺旋桨和一个用于产生俯仰力矩的远端质量气动尾[39],用于空中定向控制。
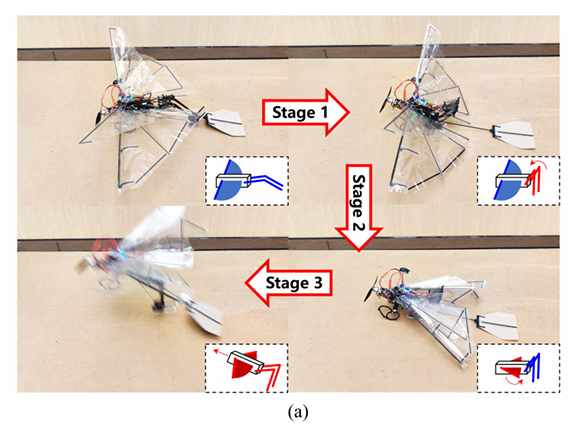
为了确保敏捷性和轻量化设计,跳跃和滑动机构通过共享相同的螺杆电机高度耦合。通过滑块的前后移动实现连续跳跃滑动运动(其中蓝色滑块A处于活动状态,红色滑块B处于被动状态,见图2的右侧子图)。值得注意的是,钩子触发器的定时可以通过电缆2的长度进行调整,从而在腿部伸展和机翼展开之间实现可调的延迟。跳滑机构的耦合关系和工作原理如下。
1) 后腿弯曲:螺杆电机顺时针旋转,将长度为l的电缆1卷起,后腿逐渐弯曲,直到被紫色钩子锁定。与此同时。滑块A向前移动一段距离s+As,其钩锁与滑块B.
2)可折叠的翅膀折叠:螺杆电机顺时针旋转以松开电缆l,而后腿由于钩子而保持弯曲。同时,滑块A向后移动了一段距离s,可折叠的机翼在围绕滑块B的电缆3的拉动下逐渐折叠。
组合触发器:螺杆电机继续逆时针旋转,并驱动滑块A向后移动距离As。拧紧的电缆2触发紫眼,后腿迅速伸展。同时,SliderA从滑块B解锁,可折叠机翼通过橡皮筋的驱动迅速展开。
B.陆地爬行机制
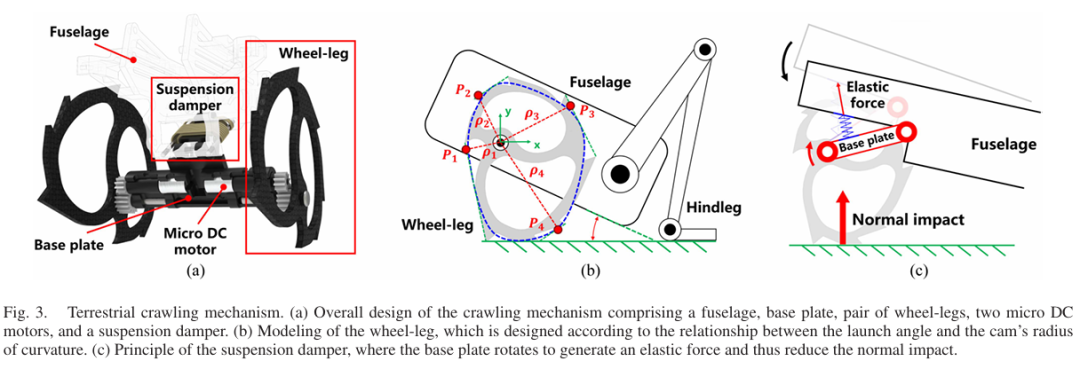
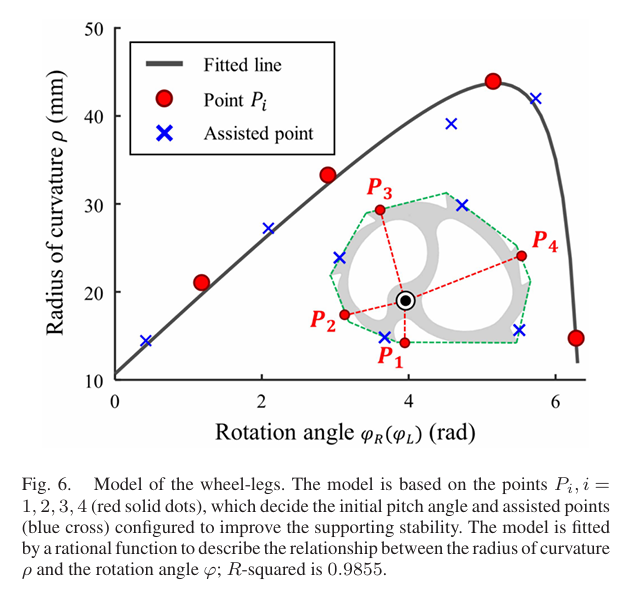
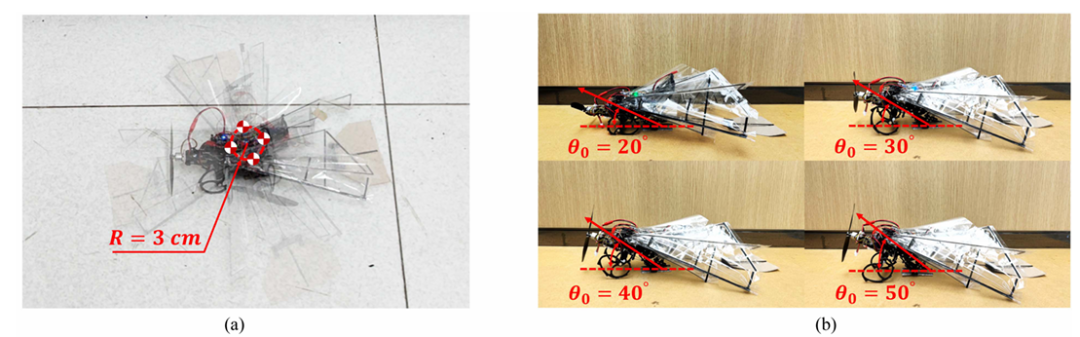
受蝗虫前腿和中腿在跳跃前主要用于爬行和调整的启发,我们构建了一个陆地爬行机构[如图3(a)所示,以灵活调整陆地的位置和方向。机器人的爬行子模块主要由直流电机驱动的一对轮腿和悬架阻尼器组成。为了在二维平面内移动,我们为爬行模块配置了两个自由度。机器人通过轮腿的同步旋转直线行驶,并通过轮腿差速旋转转弯。轮腿的轮廓被选为凸轮,用于在发射前调整初始俯仰角。由于没有编码器的微电机的控制精度有限,很难连续调整发射角度。因此,我们将凸轮的轮廓离散化,追求数值俯仰角。轮腿的设计[如图3(b)所示。
C.总体设计
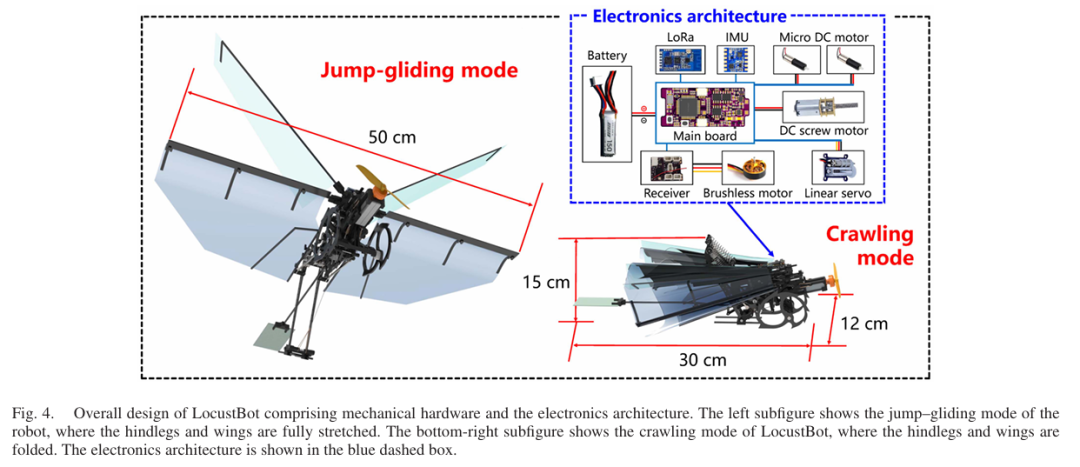
LocustBot的整体硬件设计如图4所示。集成机器人系统包括跳跃滑动机构和地面爬行机构。为了减轻重量,机身采用尼龙材料通过三维打印制造,可折叠的机翼是柔性薄膜。跳跃模块后腿和滑动模块骨架中的一些连杆对材料强度有至少1000Pa的严格要求,因此选择的材料是碳纤维和铝合金。LocustBot的质量预算如表一所示,关键长度如图4所示。
PART.03 实验
PART.04结论
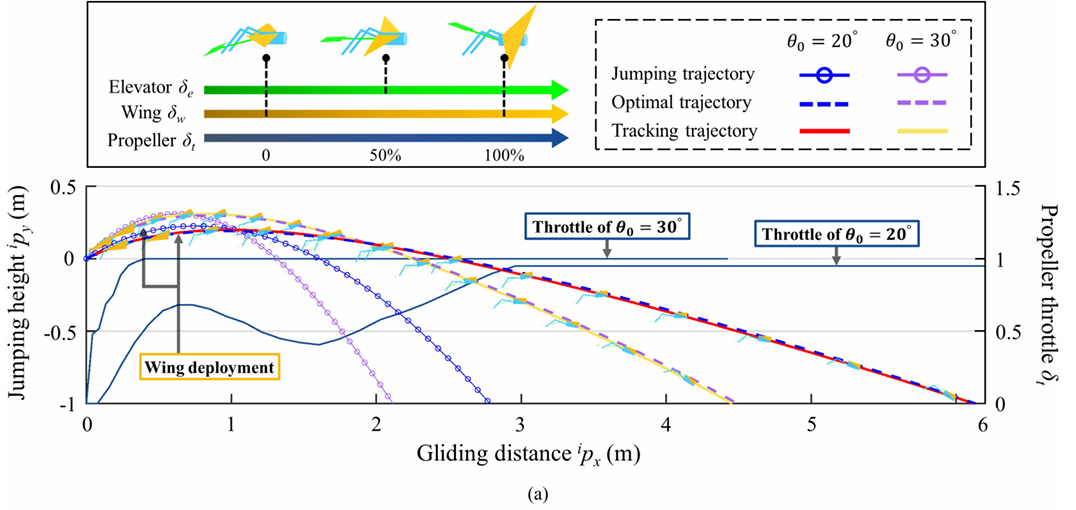
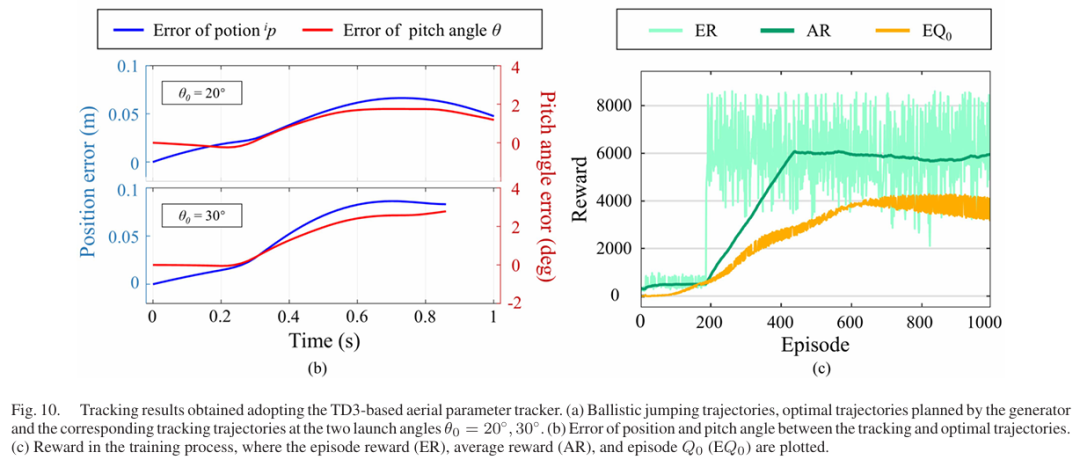
这项研究开发了一种能够连续爬行跳跃滑翔的小型蝗虫机器人。我们设计了一种协调驱动的跳跃滑动机构,同时设计了一个凸轮轮廓的横摆腿,为小型机器人实现多模式运动提供了解决方案。同时,我们将弹簧驱动的跳跃与螺旋桨驱动的滑翔相结合,赋予机器人高能利用效率。此外,对于具有多运动模式的机器人来说,确保其过渡稳定性非常重要。因此,在这项工作中,我们提出了一种基于TD3的运动控制策略来实现蝗虫的稳定过渡。
在未来的工作中,固定翼滑翔策略可以被修改为扑翼策略,以模仿真实蝗虫的飞行运动。同时,LocustBot的尺寸和质量将进一步减小,以实现长挂起时间。此外,我们将安装更多的传感器来执行各种任务。例如,LocustBot可以配备一个微型摄像头用于目标识别和分类,一个红外传感器用于搜索废墟中的生命迹象,或者一个气体传感器用于检测有害气体。

推荐阅读




×
右键可直接复制图片