
 阅读时间大约10分钟以上(4672字)
阅读时间大约10分钟以上(4672字)
2025-09-15 特斯拉、地平线、小鹏智驾技术大迁徙!智能驾驶正成为机器人的“黄埔军校”
来源:豆包
这场始于技术迁移的跨界,本质是一场关于未来话语权的战略卡位。
作者:李文泉 出品:机器人产业应用
比尔·盖茨曾断言,“机器人即将普及,并将彻底改变这个世界”。但很少有人洞察到,点燃这场革命的,并非凭空出世的天才构想,而是正飞驰在我们身边、日益成熟的智能驾驶技术。
当您还在赞叹智能汽车能自动泊车、自主导航时,一场波澜壮阔的“技术大迁徙”已悄然启程。它的主导者,正是从智能驾驶这片“产业高地”上成长起来的顶尖团队:地平线、维他动力、众擎、特斯拉……
他们转身布局具身智能,绝非追逐风口。其背后,是一场蓄谋已久的“战略溢出”——智能驾驶作为目前最复杂、最苛刻的AI工程化场景,已成为锤炼通用AI能力的“终极试炼场”。这里所淬炼出的感知、决策与控制技术,正是解锁具身智能所需的同一把钥匙。
这意味着一场降维打击正在发生:用造智能车的技术、人才与资金,去攻克智能机器人的难题。其目标,是打开一个比智能驾驶更具想象力的万亿美元市场。这场迁徙,不仅关乎技术,更关乎未来十年产业格局的重塑。
01
技术迁移的三大核心路径
智能驾驶与具身智能在技术栈上高度同源,其技术迁移的核心路径可通过以下架构图清晰地呈现:

| 技术迁移路径解析
a) 感知层
(The“Eyes”:从道路到全场景的三维理解)
在复杂、高速的动态道路环境中,实时、精确地感知周围一切物体(车辆、行人、障碍物)的位置、速度、意图,并重建道路的3D结构。
关键技术迁移:
BEV(Bird‘s-Eye-View)鸟瞰图感知:这项为智能驾驶而火起来的技术,能让车辆拥有“上帝视角”。完美迁移至机器人,使其也能在脑海中构建出周围环境的鸟瞰图,极大提升了在复杂、动态环境中路径规划的效率和安全性。
OccupancyNetwork(占据网络):智能驾驶用它来识别非标准障碍物(如落石、纸箱)。机器人同样需要这项技术来理解环境的精细几何结构,判断哪里可以行走、哪里可以抓取,这是实现真正自主移动和操作的关键。
多传感器融合(摄像头、激光雷达、毫米波雷达):从车辆上的融合方案降维到机器人,技术框架通用。但机器人对室内精度、近距离避障的要求更高,促进了这些技术在更复杂场景下的迭代。
顶尖团队实践:
地平线/地瓜:将其征程芯片上成熟的BEV和Occupancy网络模型,经过场景适配后,直接用于机器人的环境感知模块。
特斯拉Optimus:直接共享其汽车FSD的完整视觉感知栈。
b) 决策层
(The“Brain”:从路径规划到任务规划)
根据感知信息,做出毫秒级的博弈决策(超车、让行)、规划出安全、舒适、高效的行驶路径
关键技术迁移:
端到端自动驾驶大模型:这是目前最前沿的探索。输入传感器数据,直接输出控制指令。这套框架非常适合迁移给机器人,实现“输入视觉信息,输出关节动作”的端到端控制。
强化学习/模仿学习:用于训练车辆在复杂场景下的决策能力。同样,我们可以用这些方法训练机器人完成“抓取一个水杯”或“行走通过一道门”等复杂任务。
场景理解与预测:车辆需要预测周边车辆行人的轨迹。机器人则需要预测人的意图(“他要把杯子递给我吗?”)和物体的物理运动(“球弹起来会去哪?”),底层模型和能力是相通的。
顶尖团队实践:
智平方(AsquareIntelligence):作为端到端具身智能模型的典型代表,摒弃了传统的模块化堆叠(感知-规划-控制),直接采用大规模多模态模型,接收来自摄像头的视觉信息和自然语言指令,直接输出机器人的控制序列。
众擎:融合了传统运控与AI强化学习算法,使其机器人既能保证底层运动的稳定可靠,又能具备高层任务的智能和适应性。
c) 控制层
(The“Body”:从线控底盘到关节执行)
将决策指令精准、可靠地转换为车辆的转向、加速、制动等物理动作。核心是车辆线控技术。
关键技术迁移:
电控技术同源:车辆的线控制动(EHB)、线控转向(SBW)与机器人的关节电机伺服控制,在电机、减速器、控制器等底层技术和供应链上高度共享。
从“轮式”到“多足/轮足”:这是最大的差异点,也是技术迁移中需要创新的部分。但智能驾驶积累的运动控制算法(MPC模型预测控制)、状态估计技术等,为机器人更复杂的平衡、步态控制提供了高价值起点。
供应链协同:三花智控、拓普集团等传统汽车零部件巨头,正是利用其在汽车电控领域的积累,快速切入了机器人执行器(“关节”)的供应链,这是技术迁移在产业链层面的最佳体现。
顶尖团队实践:
小米:其机器人团队与智驾团队在电控技术、电机技术上有深入的共享和协同。
众擎:其自研的高性能关节模块,其背后的电机设计、热管理、控制算法,大量借鉴了高端汽车零部件的设计理念和工程经验。
02
顶尖玩家的战略棋局:从技术复用到生态卡位
技术迁移并非机械的复制,而是一场深思熟虑的战略延伸。各领域的顶尖玩家,正基于自身基因,选择截然不同的路径切入新赛道。
a) 特斯拉:垂直整合,终极通用性的野望
| 特斯拉Grok
Optimus人形机器人与其FSD完全自动驾驶系统共享同一套AI架构(神经网络、视觉处理、芯片)。
其核心竞争力在于:
终极的“端到端”与“通用AI”:特斯拉的野心是打造通用的世界模型。无论是汽车还是机器人,都是这个模型在物理世界的不同“躯体”。这种路径一旦成功,将形成其他玩家无法比拟的壁垒。
垂直整合的效率极致:从芯片、算法到制造,全部自研掌控。这种模式能最大化技术协同效应,降低成本,但也对资金和技术实力提出了至高要求。
特斯拉代表了一种终极理想主义与技术霸权的路径,其成功与否将验证“通用AI”的可行性,但难以被普通玩家复制。
b) 地平线→地瓜机器人:打造“机器人时代的Wintel”

| 地平线X5RDK套件
不直接造机器人,而是孵化地瓜机器人,发布RDK(RobotDevelopmentKit)开发套件,提供从芯片、算法到开发工具链的全栈计算方案。
其核心竞争力在于:
路径依赖与优势最大化:地平线在智驾领域的核心商业模式就是提供底层计算平台。将其在征程芯片上积累的软硬件协同优化能力、开发者生态运营经验,完美复用到机器人领域,是效率最高、风险最低的选择。
生态赋能,定义标准:其目标不是成为一家机器人公司,而是成为所有机器人公司背后的“军火商”。通过RDK降低行业开发门槛,快速吸引开发者,旨在成为机器人产业的底层标准,复制其在智驾领域的“安卓”或“Wintel”模式。
投资布局,构建护城河:通过投资维他动力等下游应用公司,既能为其平台提供标杆客户和落地场景,也能从产业爆发中获取资本回报,构建更稳固的生态护城河。
地平线的布局揭示了平台型企业的终极野心——不竞争,而是定义赛场规则。
c) 维他动力(Vbot):智驾“量产派”的降维打击

| Vbot机器狗
由地平线、理想等明星智驾团队创立,直接瞄准具身智能机器人的研发与量产。
其核心竞争力在于:
稀缺量产经验的复用:其团队在智能驾驶领域成功打造并交付了百万量级的、深度融合了AI技术的智能芯片和智能汽车产品的经验。这是绝大多数机器人团队不具备的、极其宝贵的“踩坑”经验。他们将智驾领域的功能安全体系、测试验证流程、供应链管理能力全面迁移,旨在快速实现机器人的高质量量产。
“产品定义”能力迁移:智驾行业的核心是理解用户真实需求(如“奶爸车”的理想)。团队将这种用户导向的产品定义能力用于机器人,更可能开发出切中市场痛点的产品,而非实验室玩具。
站在巨人肩上:背靠地平线的算力芯片和地瓜的开发平台,使其能专注于上层应用与集成创新,起步即拥有行业顶尖的“基础设施”。
Vbot代表了“技术老兵”的创业路径——用经过严酷市场检验的工程化与量产能力作为最核心的竞争力,进行降维打击。
d) 广汽集团:传统巨头的全方位进击
| 广汽星灵电子电气架构
发布广汽星灵电子电气架构,为智能驾驶和舱驾融合提供底层基础。推出广汽魔方场景共创平台,开放传感器和执行器接口,鼓励开发者为其SPACE车型开发各种场景应用,初步构建“硬件+软件”的生态雏形。
其核心竞争力在于:
体系化能力迁移:作为传统车企巨头,广汽的核心优势在于规模化制造、供应链管理和品质控制。其智能化转型并非单一技术突破,而是将这套成熟的整车工程体系能力,向“软件定义汽车”时代迁移。
“平台+生态”思维:魔方平台的推出,体现了其从“汽车制造商”向“平台运营者”转变的野心。这为其未来可能推出的机器人产品,提前演练了软硬件解耦、开放生态的建设模式。
稳健与开放并重:路径上不同于新势力的激进,广汽选择自研关键底层架构(灵魂),同时开放上层应用(血肉),是一种更稳健、风险更可控的转型策略。
广汽代表了传统车企巨头的转型路径——凭借其深厚的制造底蕴和体系能力,以平台化思维稳健地向智能化、甚至未来的机器人领域迈进。
e) 小鹏汽车:技术极客的算法突围
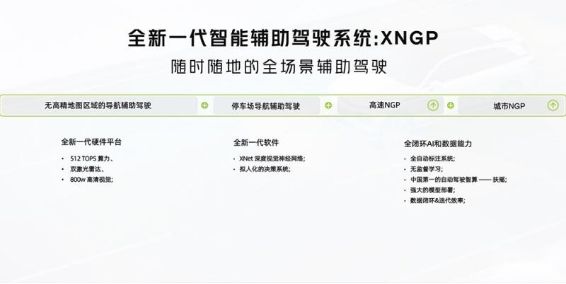
| 图表 6 XNGP系统
始终坚持智能驾驶技术的全栈自研,其XNGP系统在国内率先实现了不依赖高精地图的城市导航辅助驾驶。大规模投入端到端大模型的研发,并将其视为实现下一代自动驾驶的关键。
其核心竞争力在于:
算法能力迁移:小鹏的核心优势在于其先进的AI算法研发能力和数据闭环体系。从智能驾驶到机器人的迁移,对其而言最自然的就是决策层算法的直接复用与适配。
“大脑”先行:小鹏的路径更像是先全力打造一个超强的“AI大脑”(XNGP),未来可以将其装载在不同的“身体”(汽车或机器人)上。其对机器人的布局,必然会高度共享其XBrain等端到端模型的能力。
人才密度优势:庞大的顶尖AI团队是其最宝贵的资产,这支团队本身具备从事前沿AI研究的能力,其工作成果可同时赋能智能驾驶和机器人两大领域。
小鹏代表了造车新势力中的技术派——其本质是一家以智能驾驶算法为核心竞争力的科技公司。它的迁移路径是“由软及硬”,算法能力是其向机器人领域扩张的绝对先导。
f) 众擎机器人:产投联姻,抢占场景入口

| WAIC2025京东展区内的众擎机器人
获得京东领投的近10亿元融资,并与京东、英伟达等达成深度合作。
其核心竞争力在于:
功能安全与可靠性体系的迁移:赵同阳将智能驾驶领域对功能安全(FunctionalSafety)的极致追求和验证体系,带入了机器人关节和执行器的研发中。其自研的高性能关节模块,背后是堪比车规级的测试流程和供应链管理标准。
对B端场景的深度理解:来自汽车产业的经验,使其更理解大型企业客户(如物流、制造)对自动化升级的真实痛点和可靠性要求,产品定义更具商业针对性,而非实验室玩具。
产业资本的战略注资:京东的投资绝非单纯的财务投资,而是为其庞大的物流体系寻找下一代智能化解决方案。众擎的机器人有望率先在京东的亚洲一号仓库、配送站等场景规模化落地,获得无与伦比的真实数据反馈和迭代环境。
与英伟达合作补强“大脑”:通过与计算巨头合作,补足自身在AI大模型方面的相对短板,形成“强本体+强智能”的完整能力。
众擎的案例展示了一条独特的路径——“汽车人”用智能驾驶领域锤炼出的工程化能力“降维”赋能机器人产业。这不仅是技术的迁移,更是产业方法论和供应链资源的复用,其壁垒坚实且难以复制。
g) 核心战略对比总结
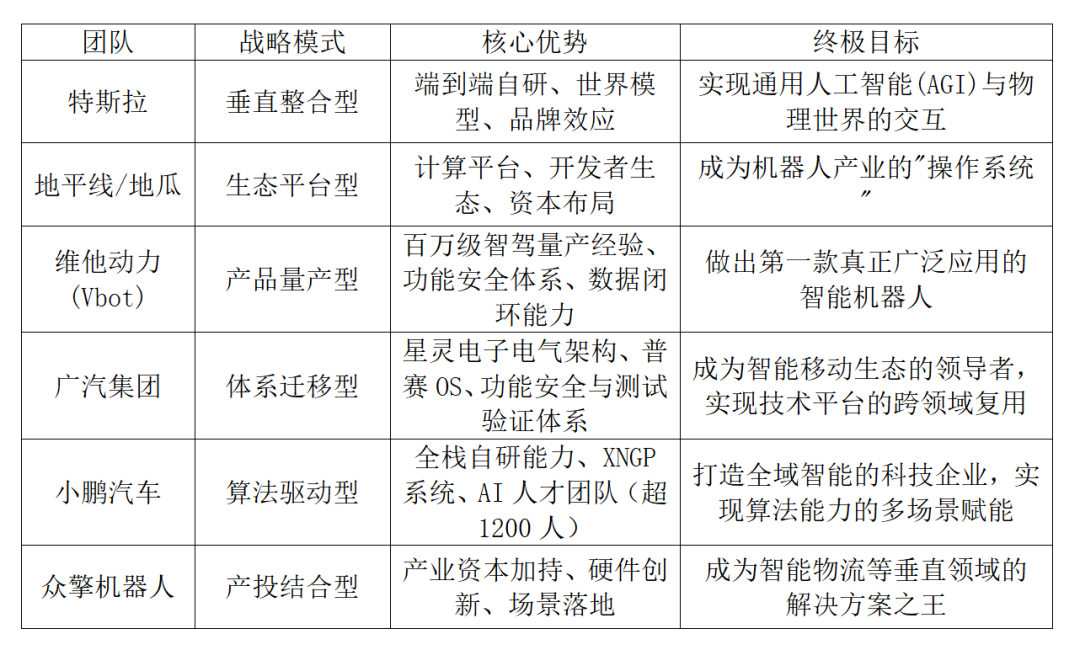
| 机器人产业应用整理
03
布局意义与未来图景
一场重构产业格局的“大迁徙”
当这些背景各异却同样顶尖的团队不约而同地选择跨界,其意义早已超越了技术本身。这昭示着,我们正站在一场宏大产业变革的起点。
这场从智能驾驶到具身智能的“技术大迁徙”,其核心价值在于它极大地降低了创新的门槛,并加速了商业化的进程。
想象一下,一个机器人团队无需再从零开始研发环境感知算法,他们可以基于成熟的车规级技术进行适配优化;他们也不必为底层的计算架构绞尽脑汁,因为有地瓜这样的平台提供了现成的解决方案。这种“站在巨人肩膀上”的创新模式,使得创业团队可以将宝贵的人才和资金资源,集中投入到更核心的应用创新、任务理解和场景落地中。
这正是资本为何对此赛道表现出前所未有的热情。投资机构看到的,是一条被智能驾驶行业提前验证过的技术路径和一支拥有成熟经验的核心团队。投资一家由智驾老兵创立、得到产业资本加持的机器人公司,在某种程度上是在进行一场“认知套利”——用相对确定的技术逻辑,去博取一个天花板更高的广阔市场。京东领投众擎、高瓴等押注维他动力,无一不是看中了其背后“技术复用”与“量产经验”的双重保险。
而当我们展望未来,这幅图景愈发清晰。智能驾驶与具身智能绝非两条平行线,它们终将交汇,协同工作,构建起真正智能的物理世界执行网络。
04
结语:抢占万物智能时代的终极入口
这场始于技术迁移的跨界,本质是一场关于未来话语权的战略卡位。
对于企业家和投资者而言,理解这场迁徙的逻辑,是抓住下一波产业浪潮的关键。它意味着,投资和创业的机会窗口并非仅仅存在于“造一个机器人”这个终端产品上,更遍布于整个新生态的各个环节:核心的零部件(如高性能关节、灵巧手)、关键的工具链(仿真平台、开发套件)、以及最重要的——垂直行业的落地应用解决方案。
那些从智能驾驶领域冲杀出来的团队,他们带来的不仅仅是感知、决策、控制的硬核技术,更宝贵的是一整套应对极端复杂场景的工程化思维、量产方法论和功能安全体系。这套方法论,正是将实验室里的炫酷Demo转化为千家万户都能用的可靠产品的关键桥梁。
最终,谁能在万物智能时代占据主导地位?或许就是那些最早理解“技术同源”真谛,并成功将一种场景下的复杂能力,高效复制到更广阔天地的探索者们。从智能汽车到智能机器人,技术的大江大河正奔涌向前,而我们所见证的,正是它破堤而出、开辟新河道的壮丽景象。未来已来,只是分布尚不均等,而机遇,正蕴藏在这场波澜壮阔的“大迁徙”之中。

推荐阅读





×
右键可直接复制图片