
 阅读时间大约8分钟(3018字)
阅读时间大约8分钟(3018字)
2025-08-25 灵巧手厂商活不下去,是不是没答好这「七大生存拷问」?
来源:Figure AI
找不到核心问题答案的灵巧手终将成「炮灰」。
作者:天南 出品:天南AI茶馆
前段去上海WAIC以及北京WRC时候,人形机器人整机无疑是全场最亮的星,而灵巧手,也成了兵家必争之地。
从能玩魔方到能和人猜拳,各种炫技操作让人目不暇接,仿佛具身智能的未来已经触手可及。

然而,在这片火热的喧嚣之下,一股“寒流”却在技术圈内暗涌。
一位在灵巧手领域的技术同学,在和我深入交流后,直言不讳的讲:
展会上灵巧手都是为了做演示而做,还不知道怎么落地,走一步看一步吧。
而且技术方案都不一样,未来两年如果收敛方案,马上就要死一大波相关企业。
这番话像一记重锤,敲醒了被展会演示冲昏的头脑。是啊,繁荣的背后,是整个行业深陷“无共识”的迷雾。
我最近调研下来,技术路线、商业模式、应用场景,几乎在所有关键问题上,灵巧手都没有找到共识方案。
这让我不禁想,这双被寄予厚望的“手”,在真正走向产业化之前,必须直面以下这七大生死拷问。
拷问一
自由度:“仿人”VS“够用”?
第一个问题,也是最基础的问题:我们的机器人到底需要一双什么样的手?
是无限趋近人手(拥有约27个自由度)的“完美复刻”,还是“够用就行”的实用主义?
“仿人派”认为,人形机器人的终极目标是融入人类环境、使用人类工具,因此,一双高度仿生的手是必然选择。
目前最高自由度的灵巧手是灵心巧手的42自由度,售49999元,它的客户基本都是些科研单位,比如剑桥、清华等。
(图源:灵心巧手视频)
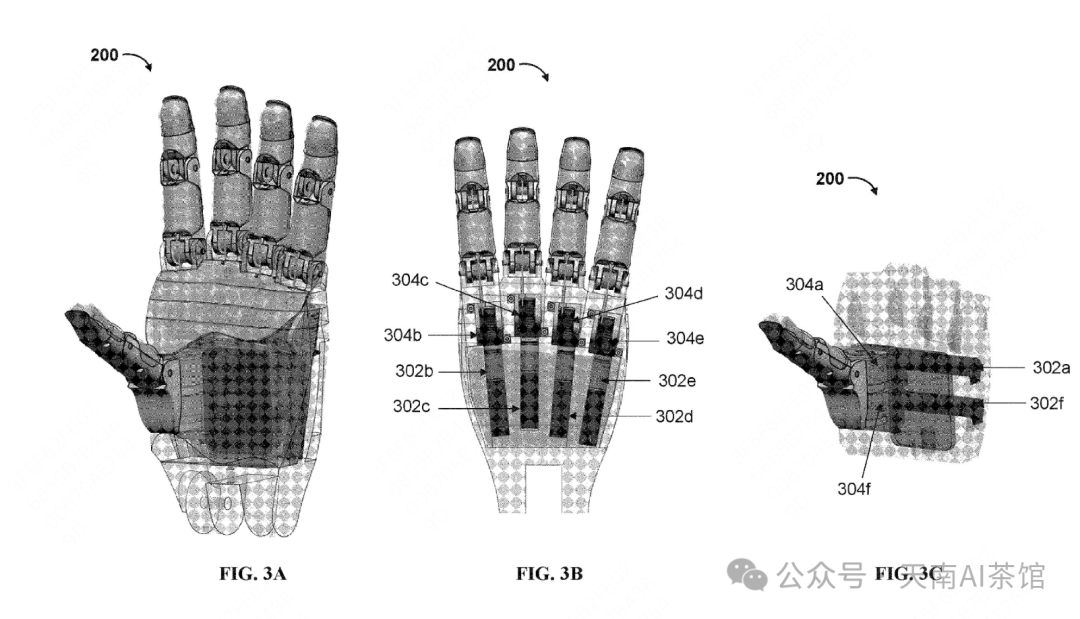
工业界特斯拉的Optimus灵巧手也在不断迭代,从最初的11个自由度升级到了接近人手的22个自由度,目标直指完全仿人。

(图源:X上传特斯拉Optimus3手部)
但“够用派”就有不一样的想法,天南在WAIC的时候,就有某创业公司的技术同学跟我讲,夹爪能实现90%以上的场景。
这么说确实有他的道理的。。。
在很多工业场景,一个稳定可靠、成本低廉的二指或三指夹爪,其效率和稳定性远超花里胡哨的多指灵巧手。
毕竟,工厂流水线不会为多余的功能买单。这场关于“理想”与“现实”的博弈,至今没有答案,也直接导致了下游厂商在选择方案时的迷茫。
天南是觉得如果是工业场景的话,夹爪是OK的。但如果是医疗和家庭等ToC场景下,跟人类还是保持一致会有更高的上限,毕竟夹爪很难帮你切菜、炒菜吧。
拷问二
传动路线:如何发力?
自由度是“面子”,那传动路线就是“里子”,决定了手如何发力、如何运动。这里的实现方案更是五花八门。
目前主流的方案有几种:
腱绳传动:
就像人手的肌腱,柔韧性好、轻量化,适合做复杂精细的动作,也是目前应用最广的方案之一。但缺点是容易磨损,精度相对较低。
齿轮/连杆传动:
像机械表一样精密,传动平稳、刚性好、负载能力强。但缺点是结构复杂、体积大、灵活性差。
丝杠传动:
精度高、承载力强,是精密操作的优选。但成本高、自重大,很难在要求轻量化的手指上大规模使用。
(图源:KGG官网)
甚至像特斯拉这样的巨头,也在不同代际的产品中摇摆,一代用蜗轮蜗杆,二代又换成了微型滚珠丝杠+腱绳,(之前的文章有提到过特斯拉灵巧手——人形机器人量产的「终极答案」?)。
这种技术路线的“百花齐放”,恰恰说明了行业还远未到技术收敛的阶段。每家都在下注,但谁也无法确定哪条路能最终通向罗马。
拷问三
感知皮肤:“摸”得清?
想象一下,你戴着一双厚厚的棉手套去穿针引线,是什么感觉?
这就是目前大多数灵巧手面临的窘境——缺乏足够精细的感知能力。一只手再灵活,如果无法准确感知力、滑移、温度和纹理,那也只是个“花架子”。
(图源:某实验室的触感皮肤)
要填补这条感知鸿沟,离不开传感器,特别是触觉传感器。但这也是个天坑。
一方面,高性能的传感器成本极高,有业内人士透露,在一只先进的灵巧手中,传感器的成本可能占到一半。
另一方面,如何将成百上千个微型传感单元高密度、高可靠性地集成到狭小的指尖空间,本身就是巨大的工程挑战。
像国内的帕西尼等公司正在这个领域奋力追赶,试图通过多维触觉传感技术,让机器人不仅能感知“有没有碰到”,还能感知“怎么碰的”。
但总体而言,低成本、高精度、高可靠性的感知方案依然是稀缺品。在“摸”的问题解决之前,“干”得好恐怕还很遥远。
拷问四
技术流派:诉求不同
在“没有共识”的江湖里,自然分化出了不同的门派,上演着一出灵巧手领域的“华山论剑”。
学院派(仿生至上):
以高校和顶级研究机构为代表,追求技术的极致和高度仿生,不计成本地探索可能性。他们的作品往往是技术风向标,但离商业化最远。
巨头派(全栈自研):
以特斯拉、宇树为代表的人形机器人本体厂商。他们选择自研灵巧手,目的是为了实现硬件和控制算法的深度耦合,将核心技术牢牢掌握在自己手中,实现快速迭代。
创业派(专注手部):
如因时机器人等公司,专注于灵巧手这一垂直领域,希望通过技术和成本优势,成为产业链上的关键供应商。他们面临的挑战是,如何在巨头自研的趋势下找到自己的生存空间。
开源派(成本杀手):
一些研究项目和初创公司,如ORCA Hand项目,致力于推出低成本、易于获取的开源方案,希望通过社区的力量推动技术普及,将成本从数万美元拉到两千美元级别。
各路玩家玩法不同,诉求各异。这种格局让行业充满活力,但也加剧了标准的缺失和路线的分化。
拷问五
成本之山:谁能用得起?
「降本或许是是唯一共识。」一位WAIC某厂商的产品负责人沟通时讲。
这句话道出了行业的最大痛点。国外顶级的灵巧手售价动辄十几万美元,国内的产品虽然便宜不少,但也要数万甚至数十万元人民币。
仅电机一项,一只手就需要6到12个,单个空心杯电机价格就可能上千,光是硬件成本就足以劝退绝大多数潜在用户。
高昂的成本像一座大山,死死地压在产业化的道路上。机器人整机厂商在想方设法降低整体成本,灵巧手作为成本占比高达1/5到1/4的大头,其降本压力可想而知。
虽然有像hitbot这样的公司喊出要将工业级灵巧手带入“千元时代”的口号,但这需要从电机、减速器、传感器到控制算法的全栈自研和产业链整合能力。在实现颠覆性的成本突破之前,灵巧手恐怕只能是少数实验室和展会上的“奢侈品”。
你现在能知道能跑能跳的宇树机器人,为什么只卖3.99w了?除了国产供应链,以及还因为基础版的手部是个握拳的模具手。
拷问六
商业化好难:如何赚钱?
技术再炫酷,最终还是要回答一个问题:谁来买单?
目前,灵巧手的应用场景听起来很美好:工业制造、医疗康复、太空探索、家庭服务……

(图源:FigureAI机器人叠衣服)
但现实是,这些场景要么对成本和可靠性要求极高(工业),要么市场尚未成熟(家庭),导致灵巧手陷入了“样样都行,样样不精”的尴尬境地。
能体现其不可替代性的工业应用场景还有待开发。特斯拉内部甚至有声音认为,灵巧手在对精度要求不高的生活场景中比在工业场景中更容易落地。
商业模式同样模糊。是作为零部件卖给机器人公司?还是提供“手+脑”一体的解决方案?一些公司甚至在尝试“沿途下蛋”的策略,即通过销售灵巧手来获取现金流,反哺人形机器人的整体研发。
这种探索充满了不确定性。找不到清晰的商业闭环,再多的资本热钱也总有烧完的一天。
拷问七
瘫痪的手,空有自由度?
最后一问,也是最深刻的一问,关乎“灵魂”。灵巧手是“肢体”,但真正让它活起来的,是背后的“大脑”(决策与规划大模型)和“小脑”(运动控制算法)。
硬件的瓶颈固然存在,但软件层面的瓶颈目前来看是远大于硬件。
一个拥有20多个自由度的手,其控制的维度是天文数字。传统的编程方式根本无法应对。
目前,行业寄希望于人工智能,特别是模仿学习和强化学习,让机器人通过观察和试错来“学会”使用自己的手。这需要海量的、高质量的训练数据,以及强大的仿真环境来降低试错成本。
硬件的不稳定、传感器的不精确,都会导致“大脑”的指令在“小脑”执行时出现偏差,形成“眼高手低”的局面。
软硬件如何协同进化,实现真正的智能涌现,是决定灵巧手能否从“玩具”变为“工具”的终极考验。
写在最后
前行路「炮灰」不可避免
回到最初那位技术同学的悲观论断,天南通过这几天的深入调研,如今有了更深的理解。
灵巧手行业正处在一个充满悖论的阶段:资本狂热追捧,技术却远未成熟;市场期望极高,落地却步履维艰。
这片“没有共识”的迷雾,让每一个从业者都像是在黑暗中探索的行者,充满了机遇,也布满了陷阱。
未来两年,真的会有一大批企业倒下,成为产业发展道路上的“炮灰”。正是这些前行者们在不同技术路线上的勇敢试错,才有可能最终为行业趟出一条通往共识的道路。
当成本、性能与智能这三座大山被一一攻克,当那双真正好用、耐用、便宜的“手”出现时,人形机器人的时代才算真正到来。
而我们,作为这个时代的见证者,能做的就是保持关注,保持思考,并给予这些迷雾中的前行者们多一些耐心和期待。

推荐阅读





×
右键可直接复制图片