 阅读时间大约6分钟(2008字)
阅读时间大约6分钟(2008字)
2025-10-23 央视报道!中国团队在机器人算法领域取得重大突破!
来源:央视新闻
该算法无需依赖力传感器,就能让机器人同时学习位置与力的控制。
作者:Ally 出品:人形机器人发布
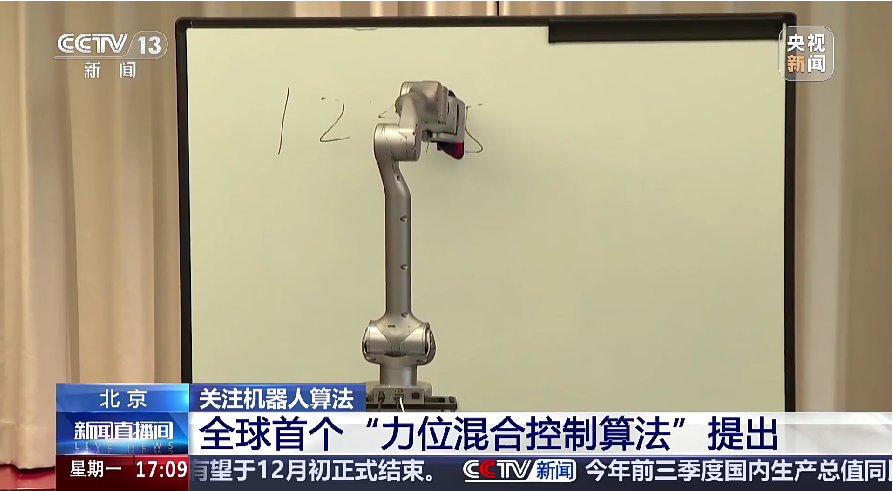
据央视新闻报道,我国科研团队在机器人算法领域取得重大突破,提出全球首个"力位混合控制算法的统一理论"。该算法无需依赖力传感器,就能让机器人同时学习位置与力的控制,相关任务成功率较只使用位置控制的策略提高了约39.5%!
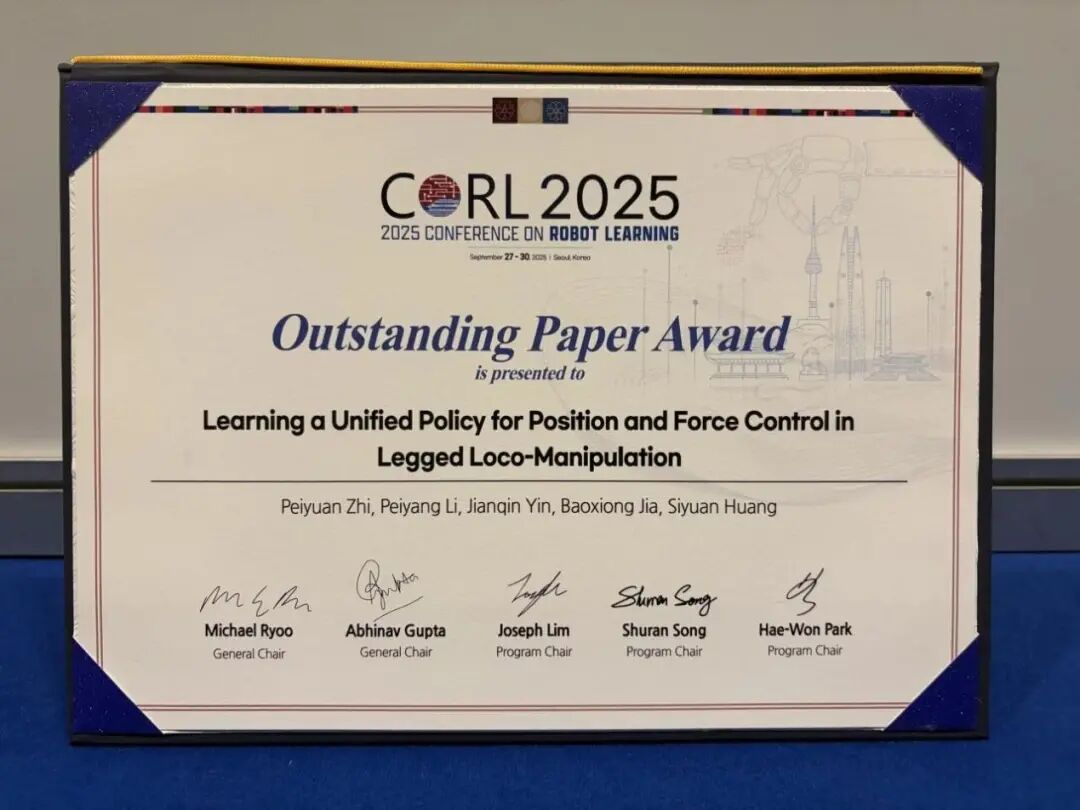
值得一提的是,相关论文斩获全球AI顶级学术会议之一(CoRL)杰出论文奖,这是该奖项设立以来,首次由全中国籍学者团队摘得!
▍人形机器人的"轻重之道":力位混合控制的必要性
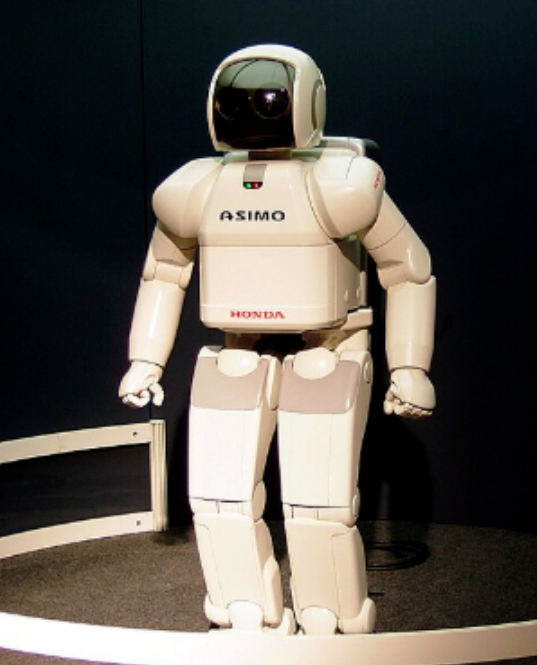
早期的人形机器人就像精密的"提线木偶"。以本田ASIMO为例,它行走时必须预设精确轨迹,一旦地面出现2厘米的落差就会摔倒。问题的核心在于纯位置控制的局限性——它只关注关节角度,却对环境的反作用力一无所知。
这种局限性在日常任务中表现得尤为明显。想象一下,当特斯拉Optimus尝试给人类递咖啡时,纯位置控制要么会因为力度过大捏碎杯子,要么因为力度不足让杯子滑落。擦黑板时,机械臂可能无法紧密贴合白板表面,导致擦不干净。开关柜门时,机器人需要准确感知只有3毫米行程的推拉式弹簧机构,仅凭位置控制根本无法完成。
人形机器人面临着三重矛盾:力量与轻盈的对抗(膝关节需爆发120N·m扭矩支撑全身,但安装空间直径不足10厘米)、刚硬与柔软的抉择(搬运20kg货箱时关节需"刚如钢铁",接触人类时又需"柔若羽毛")、精度与响应的平衡(传统谐波减速器存在背隙问题,导致力控信号延迟超过10ms)。
▍算法创新:不用力传感器,也能做好力控

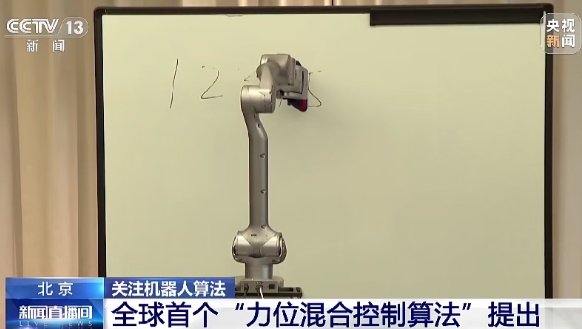
在实验现场,一个搭载了新算法的四足机械犬正在执行擦白板任务。北京通用人工智能研究院研究员贾宝雄解释道,传统的视觉-语言-动作模型主要依靠相机拍摄的照片作为输入进行轨迹预测,这种方式可能导致机器人无法严格贴合白板,出现擦不到的情况。而力位混控模型不仅能让机器人在原有基础上补齐力这个维度,还能同时实现力和位置的混合控制。
这项突破性的UniFP算法(Unified Force and Position Control Policy)是足式机器人领域第一个能够在单一框架下统一处理力与位置的控制算法。其核心灵感来自阻抗控制理论——将机器人末端执行器与环境之间的交互视作一个弹簧-阻尼-质量系统,通过控制偏差来同时调节位置与力。
算法的关键创新在于其独特的力估计机制。通过强化学习训练,该算法能够利用机器人的历史状态信息和动作信息,在完全不依赖力传感器的情况下估计出受到的合外力。让机器人不再是机械地执行预设轨迹,而是能够感知并主动对环境施加力,实现真正的智能交互。
在技术实现上,研究团队在仿真环境Isaac Gym中对算法进行了大规模训练。通过不断施加随机外力、随机命令,以及各种域随机化操作,让策略学会在各种复杂组合情况下的正确响应。这种训练方式确保了算法在真实机器人上也能稳定运行,展现出强大的泛化能力。
实验数据充分证明了算法的优越性。在力跟踪模式下,机器人末端会顺应外部扰动并停留在新位置;在柔顺控制模式下,不仅能跟踪目标位置,还会根据偏差施加与之成比例的回复力;在力控制模式下,机器人可以主动对外施加力,完成重力补偿等任务。特别是在受到外部冲击时,四足机器人能够依靠位置与速度补偿机制自动调整运动,保持整体稳定。
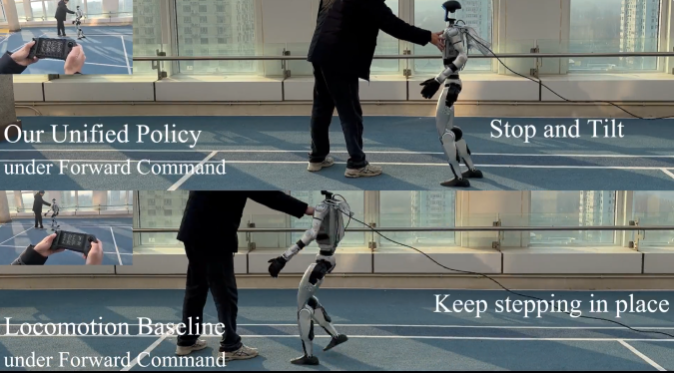
当然,这项算法具备通用性,不仅在四足机器人上表现出色,也已在Unitree G1人形机器人平台上成功验证,为人形机器人的精细化操作奠定了基础。
▍产业变革在即:从实验室到千家万户
业内认为,这项技术突破的意义远不止于学术成就。力位混合控制算法的优势集中体现在降本、提效、安全、赋能四大维度。
在成本控制方面,该算法无需依赖昂贵的力传感器,通过算法实现"虚拟触觉"。研究员贾宝雄指出,力传感器通常安装在固定的机械臂上,不仅安装麻烦而且价格昂贵。新算法有望削减30%-50%的硬件成本,大幅降低机器人研发与量产的门槛。
在任务执行能力上,该技术有望解决传统机器人"笨手笨脚"的问题。在擦黑板、开关柜门、遮挡场景操作等复杂接触任务中,成功率显著提升。例如,在抽屉被遮挡的场景下,传统视觉方法成功率仅为0.3,而采用力位混合控制的成功率提升至0.76。
安全性的提升尤为重要。机器人可实时响应外力,避免用力过猛或误操作,显著提升人机交互安全性。当机器人与人类共处时,碰撞安全至关重要。
从产业发展角度看,GGII预测,中国人形机器人市场规模到2030年将达到近380亿元。国泰海通发布研报称,近期国内人形机器人头部企业持续发布新产品并获得重要订单,目前在部分工业领域已经开始交付应用,标志着国内人形机器人产业正在快速实现商业化落地。
这项核心技术有望推动我国机器人产业在2035年突破万亿规模,2050年占全球40%以上份额,带动上下游新增就业超百万。它将为工业生产、家庭服务、医疗辅助等领域提供更智能的机器人技术支撑,推动消费级机器人渗透率向30%突破。
在资本市场,相关概念股已经受到关注。据悉,公司方面,纽威数控针对人形机器人行业的丝杠和减速器等关键零部件加工工艺特点,开发了人形机器人行业数控卧式车床系列。卡倍亿已成立机器人事业部,布局机器人线缆行业、研发机器人线缆产品,目前进展顺利。其他相关公司包括雷赛智能、禾川科技、祥鑫科技、科大讯飞、虹软科技、中科创达、寒武纪、拓尔思、固高科技、品茗科技、侨银股份、中南股份等。
从场景拓展来看,人形机器人的应用边界还在不断扩大。搭载该算法的机器人有望完成工业装配、环卫作业、仓储搬运等任务;向医疗康复、家庭护理等更精细的场景延伸。从"提线木偶"到能够理解"轻重缓急"的智能助手,人形机器人正在经历一场深刻的技术革命。

推荐阅读




×
右键可直接复制图片