
 阅读时间大约7分钟(2533字)
阅读时间大约7分钟(2533字)
2025-11-06 IJRR发表!仿生机器人新突破,中国团队研发出一款轻量化“仿生水母机器人”,仅重287克
来源:豆包
一款轻量化、高能效和卓越的机动性的仿生水母机器人。
作者:Alex 出品:机器人大讲堂
人类探索海洋的脚步从未停止,从笨重的潜水器到灵活的水下机器人,技术不断迭代。但传统水下机器人,比如常见的自主水下航行器(AUV),大多依赖螺旋桨推进,存在不少“短板”。
首先是能耗高、续航短。螺旋桨需要持续高速旋转才能产生推力,对电池依赖大,往往工作几小时就需要充电,难以满足长时间运行的需求;其次是机动性差,螺旋桨转向时需要复杂的舵机配合,在珊瑚礁、岩石缝等狭小空间里容易“卡壳”;此外螺旋桨的噪音和湍流大,也会破坏水下环境的原始状态,不适合开展精细化的生态观测。
而水母的出现,恰好为解决这些问题提供了“自然方案”。作为地球上最古老的多细胞生物之一,水母进化出了一套极致高效的运动系统:通过伞状体的节律性收缩,将水从伞下腔体快速喷出,借助反作用力前进;伸展时又能缓慢吸水,最大限度减少能量消耗。这种“喷射推进”方式,能耗仅为传统螺旋桨的1/10,且产生的湍流极小,几乎不会打扰周围的海洋生物。
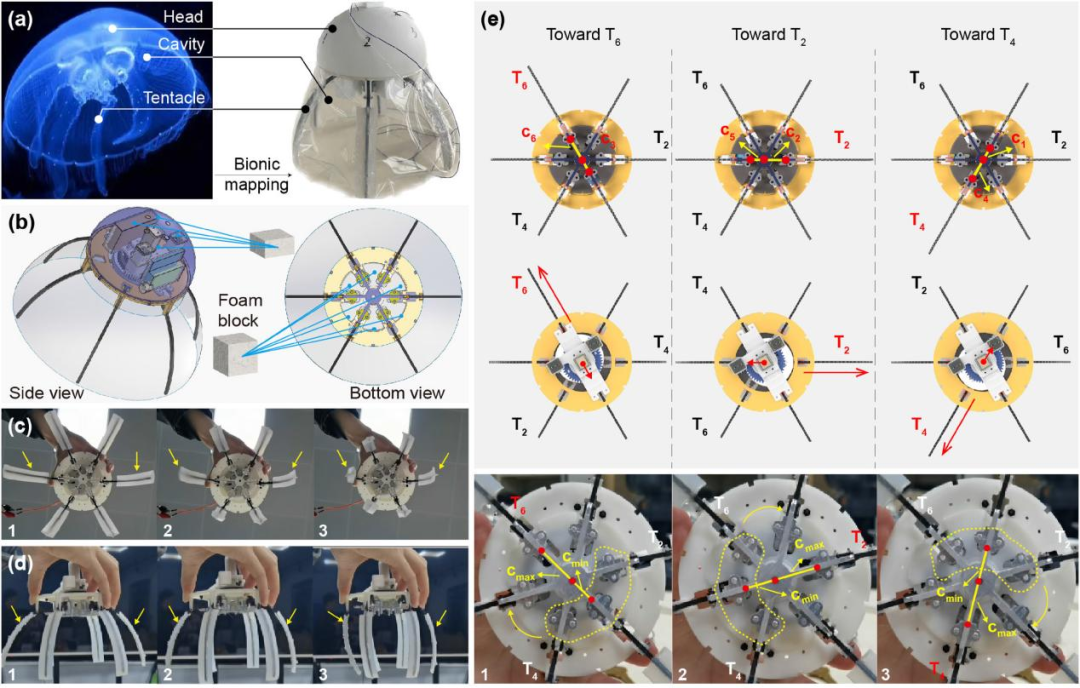
“水母的身体结构简单,但运动效率却远超很多人工设计。”来自北京航空航天大学、广东工业大学的联合科研团队从海月水母的伞状体结构中汲取灵感,设计出了一款轻量化、高能效和卓越的机动性的仿生水母机器人。
该成果以“Bionic jellyfish robot achieving enhanced steering maneuverability through asymmetric tentacles”为题发表在国际机器人顶级期刊IJRR上。
▍从水母到机器人系统的仿生映射
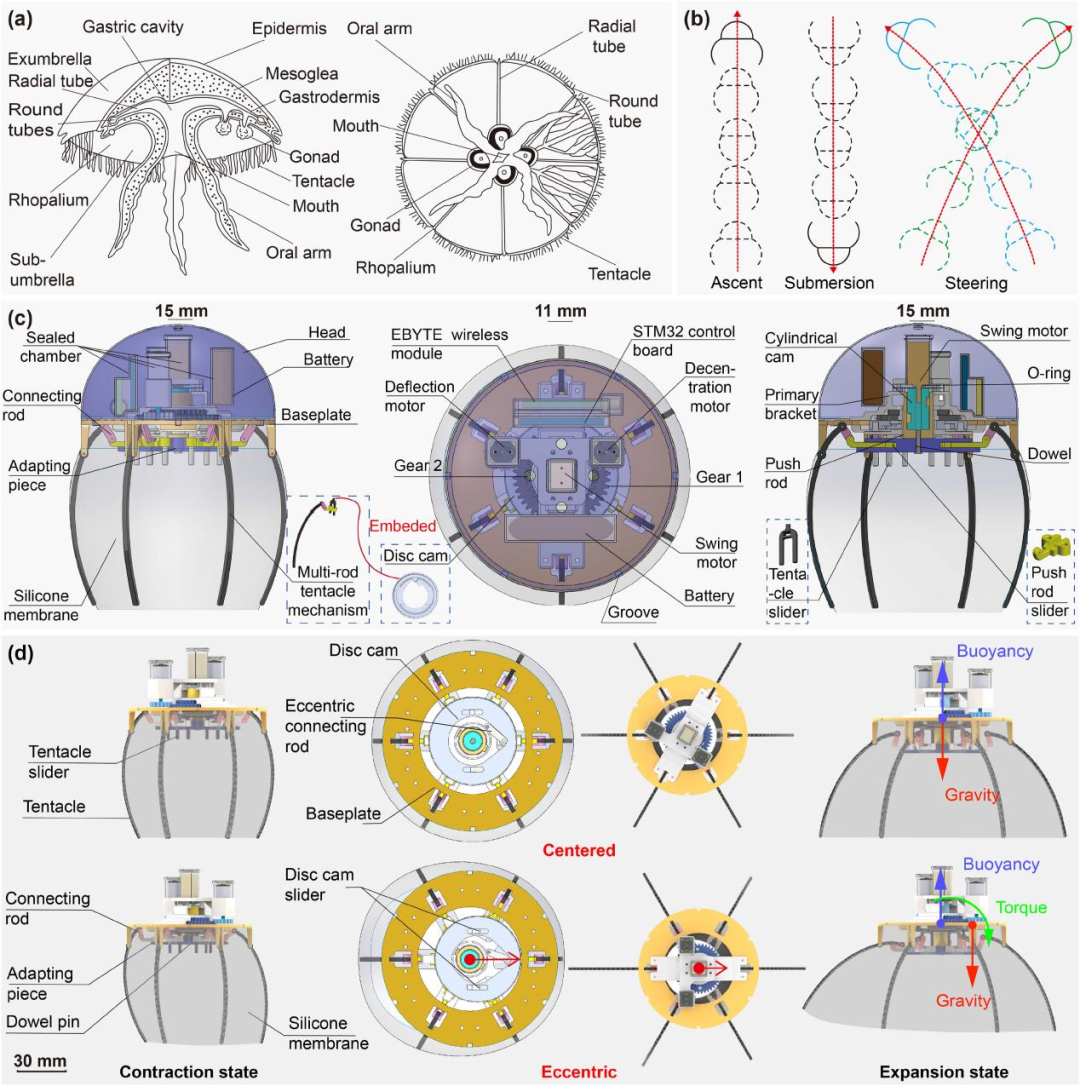
仿生水母机器人主体由头部外壳和底板构成框架,六根多连杆触手外侧覆盖着弹性硅胶膜,复现了水母伞状体的形态。驱动系统则通过两个凸轮机构实现:圆柱凸轮负责驱动触手进行规律性摆动,为机器人提供前进动力;偏心盘凸轮则是实现转向的关键,通过改变偏心位置使六根触手产生不对称的摆动幅度,从而形成转向所需的推力差。整个系统由基于STM32F4的紧凑型控制器协调指挥,配合无线通信模块和高效电池,构成了一个完整的水下移动平台。
从水母到机器人系统的仿生映射
摆动机构:像水母收缩一样“发力”
水母前进的动力来自伞状体的收缩,而机器人的“动力源”是一套圆柱凸轮机构。简单来说,圆柱凸轮就像一个带凹槽的“旋转轴”,当电机带动它转动时,凹槽会推动与之相连的推杆做往复运动;推杆再通过连杆带动六条触手同步摆动,这就模拟了水母伞状体“收缩-伸展”的动作。
为了让运动更平稳,科研团队还为推杆设计了“匀加速-匀减速”的运动模式。推杆伸展和收缩时,速度会逐渐增加再缓慢降低,避免了机械冲击,也让水流喷射更均匀。六条触手外侧覆盖着一层厚硅胶膜,当触手摆动时,硅胶膜会像水母的伞状体一样,形成一个临时“腔体”:收缩时挤压水流产生推力,伸展时吸入水流为下一次推进做准备。这套机构的妙处在于‘既简化了传动结构,又保证了推力的稳定性,经过测试发现,机器人单次收缩能产生0.75牛的推进力,相当于能轻松推动两个鸡蛋的重量。
转向机构:不用“方向盘”也能灵活转弯
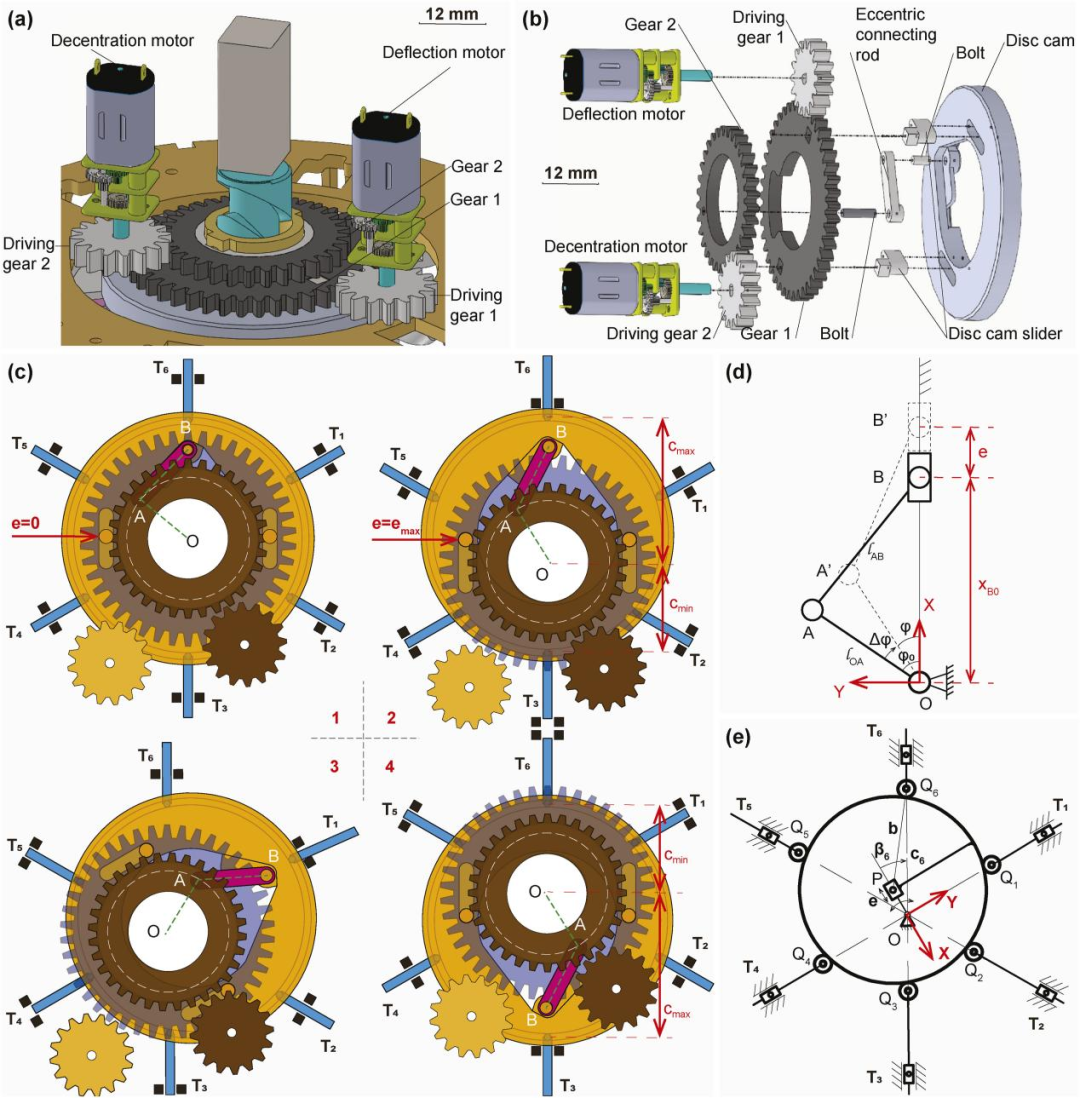
传统水下机器人转弯需要靠舵机或调整螺旋桨转速,而水母的转向更巧妙,通过伞状体不对称收缩,让一侧喷水力度大于另一侧,从而改变前进方向。科研团队模仿这一原理,设计了一套偏心圆盘凸轮机构,让机器人不用“方向盘”也能灵活转向。
转向机构及工作原理
当偏心圆盘处于中心位置时,六条触手的摆动幅度完全一致,机器人沿直线前进;一旦圆盘向某个方向偏移,靠近偏移方向的触手摆动幅度会变大,另一侧则变小,由此形成的推力差自然驱动机器人转向。这种设计摒弃了传统的舵或重心调节装置,使结构更加紧凑高效。
为了实现更多方位的转向,团队还为偏心圆盘搭配了两个电机:一个负责调节圆盘的转向力度,另一个负责控制圆盘的转向角度。比如要向左转,电机就会让圆盘向左侧偏移,左侧触手摆幅变大,右侧变小,机器人就会自然向左转弯。
▍偏心率显是仿生水母机器人自由转向的关键参数
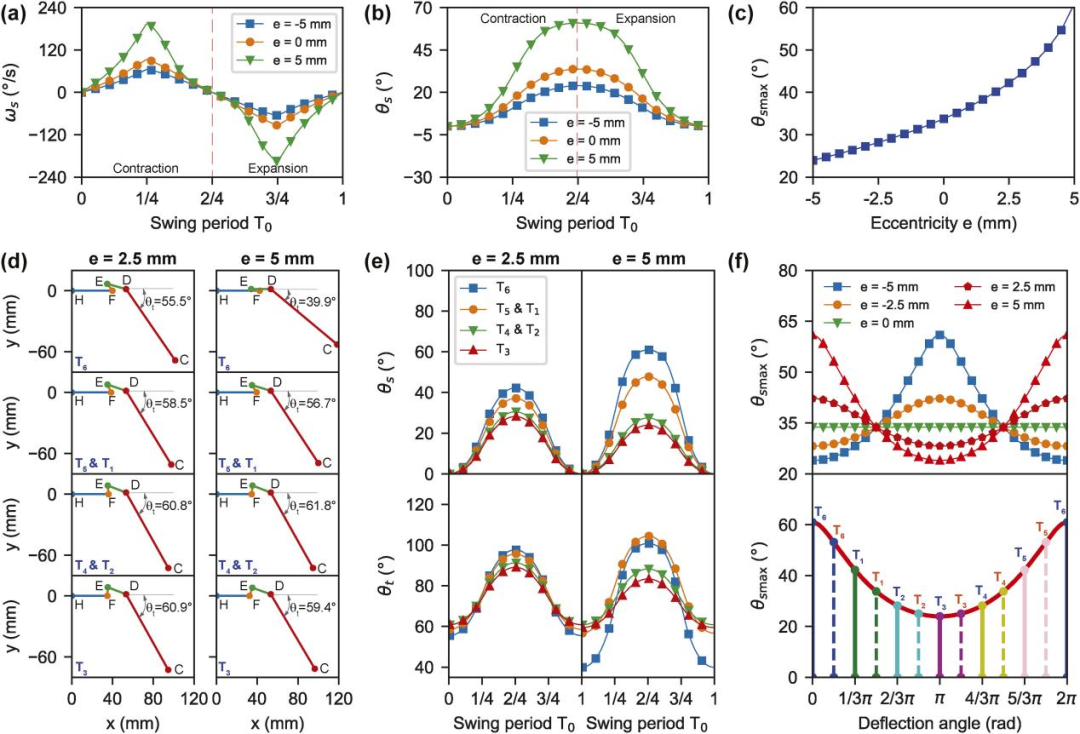
为了深入研究这款机器人的运动机理,研究团队建立了详细的运动学模型,精确计算了在不同偏心率下每条触手的摆动角度和速度变化规律。分析发现,偏心率显著影响触手的运动,是仿生水母机器人能够自由转向的关键参数。当偏心率从零增加到5毫米时,触手的最大摆动角度会从33.7°增大到61.0°,这种显著的变化为转向控制提供了充分的理论依据。通过这些计算,研究人员得以优化齿轮传动比和电机控制参数,确保机器人运动的精确性。
运动分析结果
在流体动力学方面,团队通过计算流体动力学仿真软件对机器人的游动过程进行了精细模拟。仿真结果展示了机器人游动时周围的流场变化:在触手收缩排水阶段,后方会形成推动前进的涡旋结构;而在转向过程中,左右两侧触手产生的涡旋强度出现明显不对称,这种不对称的涡旋分布正是产生转向力矩的关键。
仿真预测的游泳速度和转向趋势与后续的实际实验结果高度吻合,验证了设计的合理性。为了进一步验证理论模型,团队还搭建了专门的实验平台测量推进力。实测数据显示,机器人在一个推进周期内产生的峰值推力约为0.75N,与理论计算值0.78N非常接近,这种高度一致性充分证明了设计方案的可靠性。
通过CFD 仿真得到的不同偏心率e下的转向结果
▍性能测试:从实验室到真实海洋环境
在完成理论与实验验证的基础上,研究团队制造出了一款仿生水母机器人原型。这款机器人原型重量仅为287克,在收缩状态下直径为110毫米,高度为159毫米,是当前同类刚性水母机器人中最轻巧的之一。在性能测试中,它展现出了令人印象深刻的水下机动能力。在有线测试条件下,机器人的最大平均游泳速度达到7.5厘米/秒,相当于每秒游过0.47个体长,这个游泳效率在现有的仿生水母机器人中名列前茅。
仿生映射和机器人组装测试
更值得关注的是其卓越的转向能力。通过精确控制偏心机构,机器人能够执行各种复杂的机动动作。实验显示,它不仅可以轻松完成90°、180°的标准转向,最大转向角甚至能达到200°。
在转向过程中,机器人的响应速度极快,最大转向速度高达22.7°/秒。无论是简单的左转、右转,还是复杂的“S”形路径跟踪,机器人都能流畅完成,展现了极高的控制精度和灵活性。
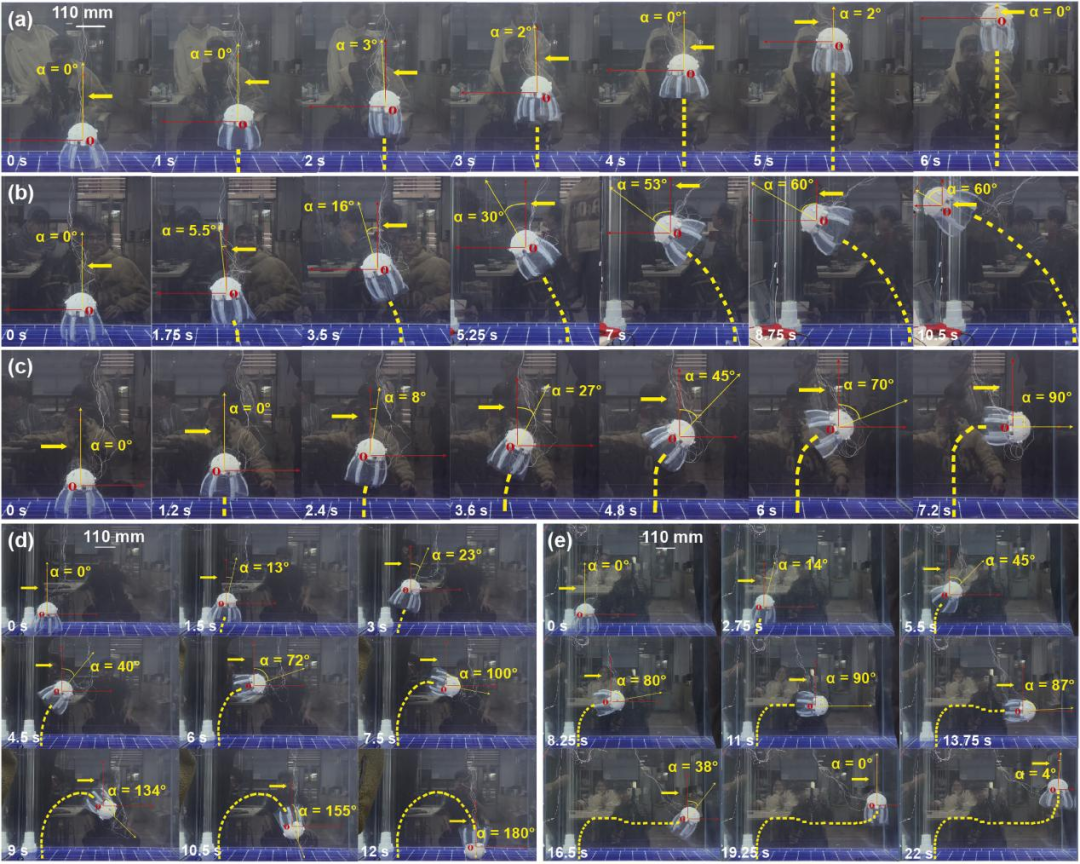
实验室内有线实验
为了验证其在真实环境中的适应性,研究人员还在游泳池和生态流域进行了测试。即使在有水生植物、水流扰动更复杂的自然水体中,机器人依然保持了稳定的推进力和可靠的机动性,并且对周围水生生物的干扰极小,显示出良好的环境兼容性。
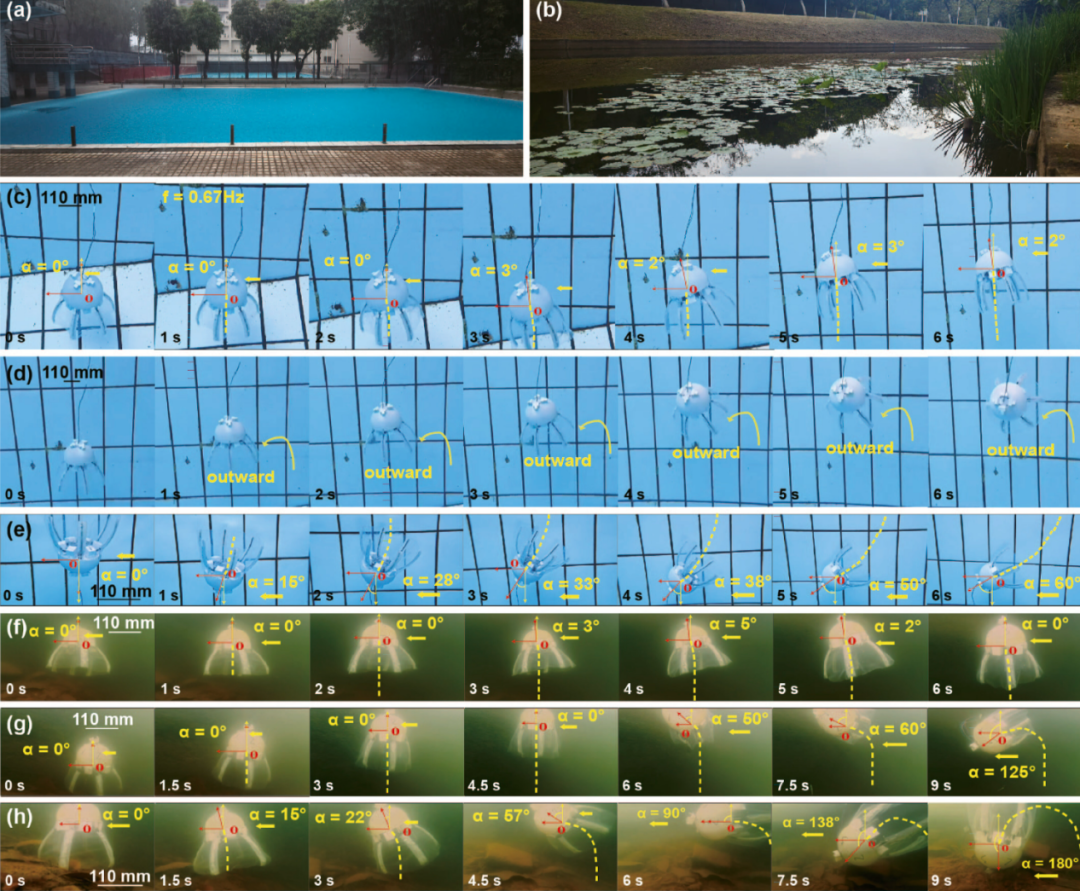
水池和生态流域中有线实验
在宽10米、长20米的泳池中,机器人展现出了出色的适应性。它能沿直线垂直上升,也能完成90°转向,甚至能在水面附近游动——即使部分身体露出水面,也能通过调整触手摆动幅度保持平衡。无线通信模块在水下3.42米范围内能稳定接收指令,不会因水流干扰而失联。
更关键的是生态流域测试。在水深80厘米、布满水生植物和微生物的池塘中,机器人依然能稳定工作:平均游泳速度6.8厘米/秒,转向角126°,且不会因水草缠绕而停摆。更重要的是,它产生的湍流极小,周围的鱼虾等生物没有出现任何应激反应。这意味着,未来它可以在不打扰海洋生态的前提下,开展精细化观测。
论文链接:https://journals.sagepub.com/doi/10.1177/02783649251377101

推荐阅读




×
右键可直接复制图片