 阅读时间大约10分钟以上(4969字)
阅读时间大约10分钟以上(4969字)
2025-11-06 小鹏IRON的技术难点都在哪?仿生路线会是人形机器人的下一条新分支吗?
来源:小鹏机器人
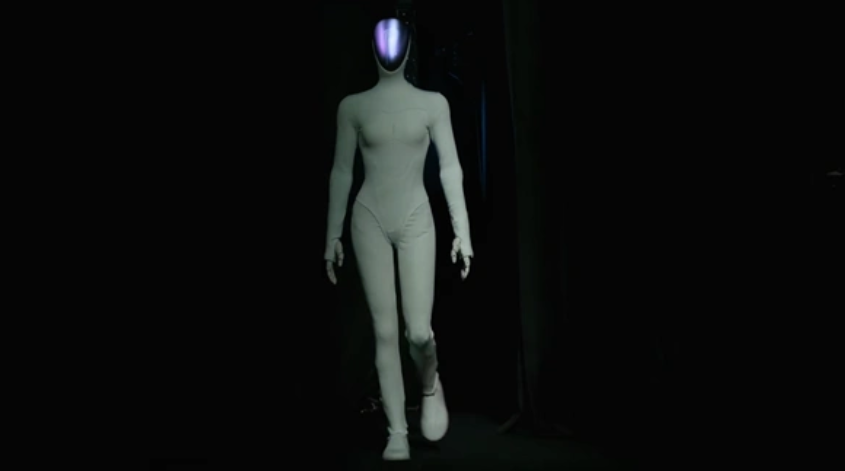
唯一一个可以走猫步的人形机器人。
作者:Jack 出品:人形机器人发布
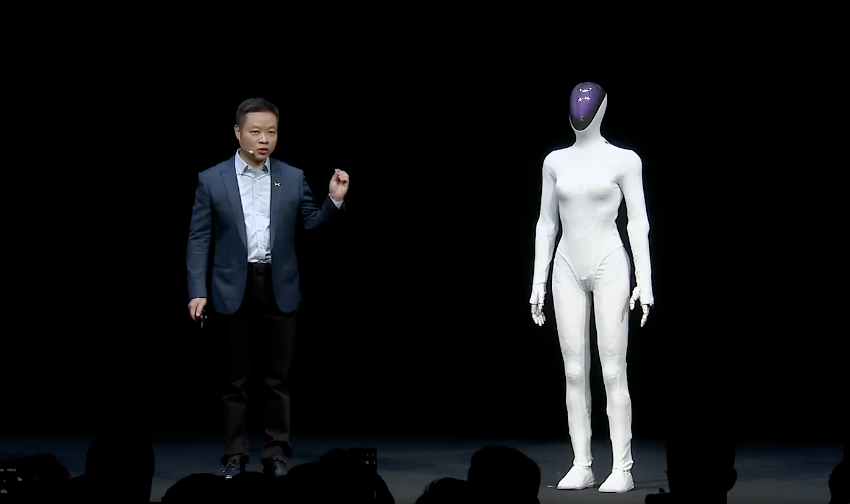
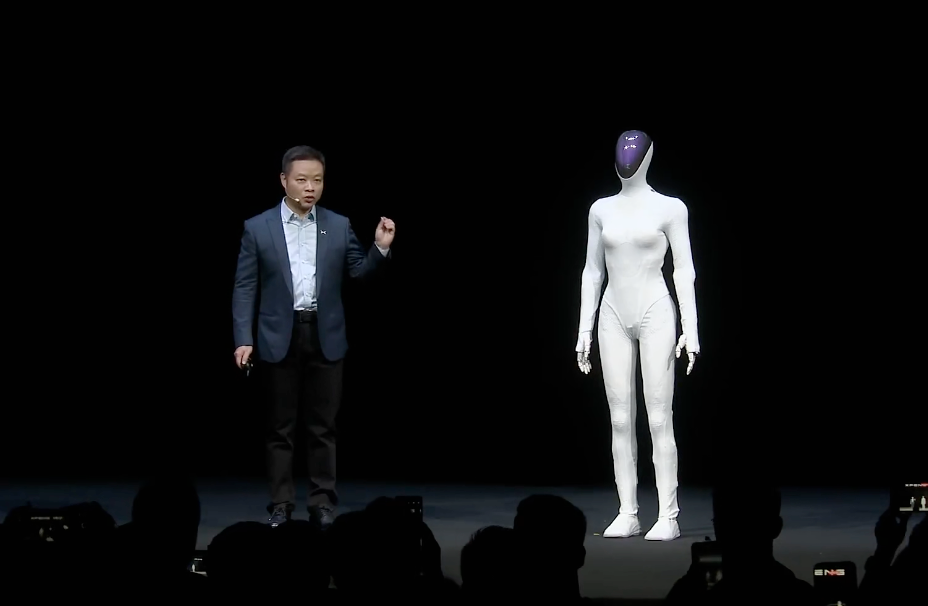
11月5日,全网都知道小鹏发了新一代人形机器人IRON。因为这是全网目前唯一一个可以走猫步的人形机器人。
笔者与大多数人一样,最开始认为是采用的特斯拉那种真人皮套。因为按照官方的描述,这必然涉及到几项核心技术,而且难度都非常高。

结果11月6日小鹏拍了个一镜到底无剪辑的视频,让人大呼震撼!那么这些技术到底难在哪,我们主要拆分成了三个部分来说说。
综合看下来,这也意味着这款机器人只是类似概念车的“概念机”,或许适合炫技,但短期很难量产。
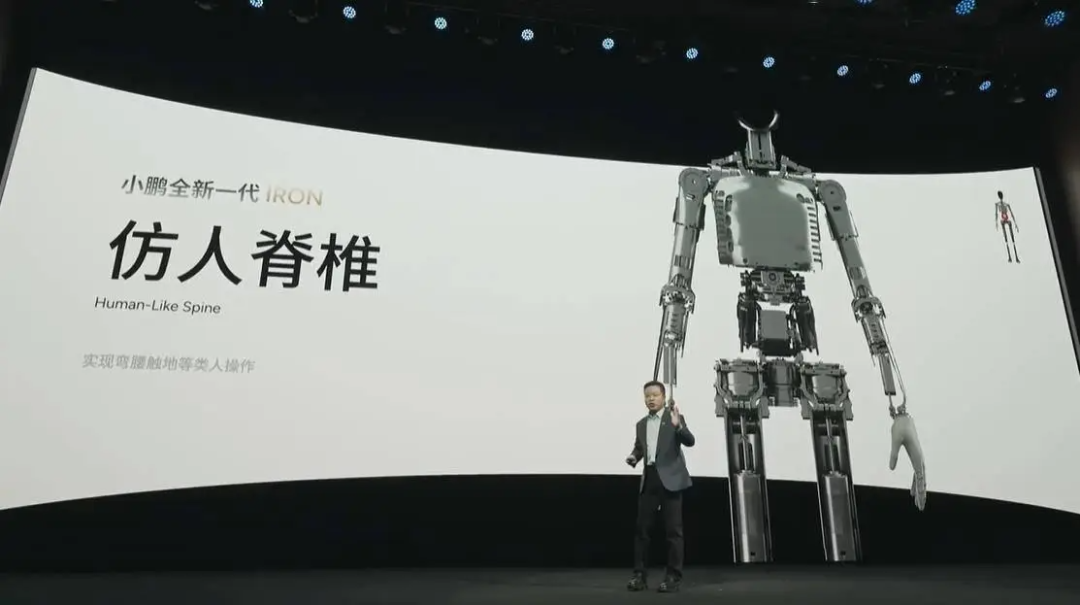
▍仿人脊椎的核心技术难点在哪?
小鹏IRON机器人外形最大的特点是仿人,拥有“骨骼-肌肉-皮肤”:仿人脊椎、仿生肌肉、全包覆柔性皮肤、头部3D曲面显示、仿生灵动双肩。
同时官方说IRON拥有全身82个自由度,动作灵活度达到行业新高,而且用了一种可弯腰触底的仿人脊椎。

如果真能实现,这简直是工程学的爆炸奇迹。因为人类的弯腰动作不仅仅是铰链式的折叠,它涉及脊椎多个椎骨的依次弯曲、骨盆的旋转和下肢的协调。仿人脊椎可以吸收地面的冲击,并通过多个自由度的微调来动态分配重心,使得整个动作更加流畅、自然,不易摔倒。这对于在复杂、非结构化环境中保持稳定至关重要。仿人脊椎的柔性结构可以像弹簧一样储存和释放能量。例如,从弯腰状态起身时,可以利用“拉伸”储存的弹性势能辅助电机发力,这理论上更加节能。
一个刚性的躯干只能让机械臂在其长度范围内工作,而一个可以弯曲的脊椎,相当于延长了人形机器人的“基座”,让机器人能够以更多样的姿态触及更低、更偏的物体,极大地扩展了其工作空间。当机器人需要与人类协同工作或在脆弱环境中操作时,柔性的脊椎可以作为一道天然的“缓冲器”。在发生意外接触时,它能通过形变吸收部分能量,降低对人或物的伤害风险。
在人类行走、奔跑或跳跃时,脊椎的S形曲线和椎间盘是优秀的被动减震器。仿人脊椎能将脚部与地面的冲击力有效地分散和吸收,保护机器人头部和躯干内精密的电子元件免受高频振动的影响。同时,一个能像人一样弯腰、转身的机器人,其行为模式更符合人类的预期,让人感觉更自然、更可预测,从而在心理上更容易被接受。这在服务机器人和社交机器人领域是巨大的优势。
其难点在于高自由度集成。因为人类的脊椎有24个椎骨,构成了一个多自由度的柔性系统。在机器人上复现,意味着需要在有限的空间内集成大量的关节、执行器和传动机构。这带来了巨大的设计、制造和封装挑战,目前仍不知道小鹏这种结构如何设计实现的。
其次,腰部是承重和发力的核心区域。要让机器人弯腰并抬起重物,需要大功率的驱动器。但这些驱动器本身就有重量,会增加腰部的负荷,形成“为支撑驱动器而增加更多驱动器”的恶性循环,即“自重惩罚”。
还有就是状态估计困难:自由度越多越难动起来,这基本上业界常识,一个多自由度的柔性脊椎,其形态更是时刻变化的。控制系统需要精确知道每一刻脊椎的弯曲角度、受力情况,这需要集成大量的位置、力矩和触觉传感器,数据量巨大,传统的机器人控制基本都是基于精确的模型和相对固定的基座。而带有柔性脊椎的机器人,其整个上半身都是一个动态系统。控制器的变量急剧增加,传统的控制方法难以应对,需要开发全新的、基于强化学习、全身协同控制等先进算法、更高的算力来协调数十个关节的运动。

因为弯腰时,机器人的重心会大幅前移,且整个结构变得“柔软”,稳定性极差。控制系统必须实时计算重心位置,并通过脚踝、髋关节甚至脚趾的微小调整来维持平衡,这对实时计算能力和控制精度要求极高。而且结构越复杂,潜在的故障点就越多。
仿人脊椎作为承重和运动的核心部件,如果实现,那么长期必然承受交变应力和冲击,其机械结构的疲劳寿命、电子线缆的反复弯折可靠性都是严峻的考验。一旦损坏,维修也将非常困难,所以这代机器人即便实现也不可能是量产机,只是展示产品。小鹏也透露,这一代IRON是预研的最后一个版本,量产版本将不高于170cm。
▍3D晶格拓扑结构仿生肌肉是什么?
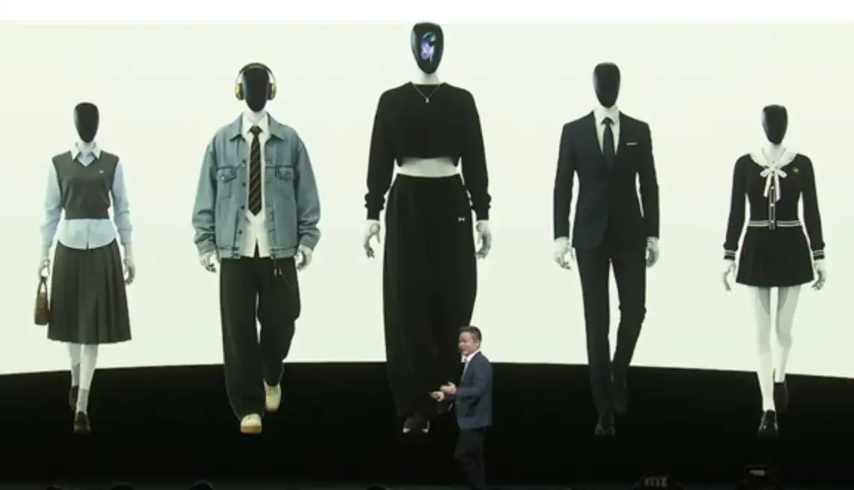
全新一代IRON还采用“由内而生”的设计理念,拥有仿人脊椎、仿生肌肉和全包覆柔性皮肤,支持触觉传感。其肌肉结构通过3D打印晶格材料模拟,表面则由无缝材料进行整体包裹,首次推出了女性形态。
“由内而生”该设计理念其实与特斯拉的第一性原理非常类似,核心都在于其系统层面的整合与仿生学应用的深化,其实也标志着当前人形机器人设计,正从传统的模块化堆叠向仿生结构-驱动-感知一体化的范式转变。这种范式主要能将仿人脊椎的骨骼系统、仿生肌肉的驱动系统与柔性皮肤的感知系统进行协同设计,有望在系统层级实现动力学耦合与能量传递的优化,从而提升整体运动效率与能效。
其次,采用3D打印晶格材料构建仿生肌肉结构非常有意思,其优势在于实现了结构功能一体化。晶格结构在宏观上可实现仿生拓扑优化,在保证结构刚度与强度的同时实现极致的轻量化,并能设计出具有可变刚度特性的被动柔顺机构,这对于吸收冲击能量、实现安全物理人机交互至关重要。
最后,全包覆柔性皮肤与特定人形形态的设计也可以理解为会成为人形机器人的下一个方向,目前1X公司、figure都有类似设计,这种设计更容易超越了传统人机交互的安全范畴。同时柔性皮肤作为大面积分布式触觉传感器阵列的载体,为机器人提供了丰富的本体感知与外触觉信息,是实现精细操作与安全交互的关键。而明确的外观、形态设计则是一种有效的社会信号传递,能够降低恐怖谷效应,并预先设定用户对其功能与交互能力的预期,有助于其在特定服务场景中的部署与接受。
小鹏汽车董事长、CEO何小鹏表示,小鹏的目标是在2026年底实现规模量产高阶人形机器人。这其实有些夸大成分,因为这几项技术,目前也同样很难达到量产指标。
例如首要难点集中于仿生驱动与执行器技术。因为“仿生肌肉”目前成熟度不高,用这类技术作为主动驱动器,面临着能量密度、响应带宽、驱动精度与耐久性之间的固有矛盾。当前技术背景下,此类驱动器的性能指标,特别是在功重比与动态特性上,仍难以与传统旋转关节驱动器竞争。将驱动功能与晶格结构进行一体化制造,还涉及复杂的多材料增材制造工艺与嵌入式传感-驱动系统集成问题,其可靠性是巨大考验。

其次,全包覆柔性皮肤的工程实现构成了一个多目标优化难题。在机械层面,皮肤材料需要承受多关节区域的大变形、高周期疲劳载荷而不失效,这对高分子材料的力学性能提出了极限要求。
在热管理层面,连续包覆结构会严重阻碍内部高功率密度执行器与电子设备的对流散热,可能必须引入复杂且沉重的主动冷却系统,从而抵消轻量化带来的收益。在可维护性层面,“无缝”设计往往与模块化维修理念相悖,任何内部单元的故障都可能导致高昂的更换成本,但是小鹏确实敢想敢做,这点无疑是国内第一人。

在人形机器人上,最终所有硬件创新想要实现,都基本依赖于极其复杂的建模与运动控制策略。仿人脊椎与仿生肌肉构成的高冗余度、强耦合连续体或半连续体系统,其运动学与动力学模型是非线性和高维的,难以进行实时精确求解。这要求发展基于全身协同控制框架的先进算法,并依赖大量嵌入在肌肉与皮肤中的本体感知与触觉传感器进行状态反馈。协调数十个柔性执行单元以完成动态任务(如弯腰触底),同时对分布式触觉信息进行融合与处理,对实时计算架构提出了前所未有的要求,是控制系统设计面临的核心挑战。
▍脚尖被动自由度
头部3D曲面仿生球面设计,集成各种类型传感器以及仿生灵动双肩笔者觉得短期内有些冗余,因为人形机器人肩关节搞四自由度让肩部像人类一样灵活意义不大,但是增加脚尖被动自由度,让脚部轻盈、步伐轻柔却很有意思,也是我们认为人形机器人业界能学、能比较快实现的技术。
因为脚尖被动自由度的核心意义在于,它通过简单的机械结构,极大地增强了机器人在动态运动中对复杂地形的适应能力和能量效率,其作用类似于高级跑鞋的“滚动助推”设计。在人类行走中,蹬离阶段是通过脚尖(跖趾关节)的弯曲产生一个平滑的推力,将身体推向前方。
一个具有被动跖屈(脚尖下压)自由度的脚掌可以完美复现这一过程。它允许机器人的脚掌作为一个整体在地面上“滚动”,而非刚性“拍打”,从而将身体重心更平滑地向前推进,减少了膝关节和髋关节所需提供的补偿性扭矩,降低了整体能耗。
在奔跑或快速行走时,脚尖被动机构能有效吸收脚掌触地瞬间的冲击力。通过机构的微小形变或转动,可以延长冲击作用时间,减小对机器人本体结构的冲击载荷,避免机体振荡失稳,同时当在不平地面行走时,被动的脚尖自由度可以通过微调脚底与地面的接触点和角度,实现瞬时适配,为主要的主动关节争取反应时间来进行平衡调整,这相当于增加了一个底层、高频的被动稳定器。
从IRON的猫步可以看到,被动的脚尖设计能使脚底更充分地与不平整地面贴合,增加接触面积,从而提供更好的抓地力。这在光滑或松软地面上尤为重要。因为在转弯和走猫步时,被动的内收/外展自由度可以允许脚掌更好地适应离心力带来的姿态变化,实现更流畅、更稳定的转向。
尽管概念上是一个“被动”机构,但其工程设计却充满了挑战,需要在性能、可靠性和复杂度之间取得精细的平衡。这里不得不说小鹏的设计师是有点天赋在里面的。
因为脚尖机构,特别是跖趾关节,在蹬离阶段需要承受数倍于机器人体重的巨大冲击载荷。设计者必须使用高比强度的材料并进行精巧的拓扑优化,在保证结构刚度和疲劳强度的前提下实现极致轻量化,以避免沉重的末端执行器对腿部摆动动力学产生不利影响。而且机器人的脚部空间极其有限,却需要容纳复杂的铰链、扭杆或弹性元件,同时还要为足底压力传感器、线缆等留出空间。机械设计也面临巨大的集成挑战。这估计需要通过大量的仿真和物理实验进行“调参”,以匹配机器人的质量分布、步频和预期运动速度。
小鹏的官方解释是搭载了3颗图灵芯片和物理世界大模型,不得不说肯花钱搞研发的企业确实牛逼。
▍背后实力与底气
小鹏有没有实力做呢,其实是有的小鹏布局具身智能已久,技术团队储备深厚。汽车人形机器人团队从2020年前后便开始筹备,目前一号位为米良川,米良川曾经担任卡内基梅隆大学担任研究员,2005年曾加入英伟达团队,负责中国的安卓平台部门。在英伟达期间,米良川曾向英伟达全球副总裁吴新宙汇报,有过管理百人团队的经验。
老板也很支持这件事,何小鹏对机器人赛道的关注始于2016年,“几乎每年都会认真调研一次机器人方向”,曾与宇树王兴兴长谈。今年3月,何小鹏表示,人形机器人将是小鹏的长期业务,最终可能需要投入1000亿元,将在2026年量产面向工业的L3级别机器人。2020年,何小鹏收购了赵同阳创办的“多够机器人(Dogotix)”,并成立「鹏行智能」,高峰期团队人数高达300多人。
小鹏机器人的研发历程也经历了从四足到双足的根本性转变。最初,团队认为双足机器人的不稳定性与“大脑”技术滞后,难以支撑实用化落地。然而,七年五款四足产品的实践让团队意识到:自然生物中无四足带手的形态,而中国多数家庭有限的空间也使四足机器人难以适应。
后续「鹏行智能」核心团队出走,曾经的团队负责人赵同阳创办了「众擎机器人」。2023年以后,何小鹏又引进了米良川负责机器人业务。近两年,小鹏汽车的机器人团队进行了一波持续调整,团队人数一度缩减到70个人,又重新建到如今200人左右的规模。目前在小鹏汽车的产线上,已经部署了几百台的人形机器人,大多用于算法调教、摇操作采集数据等。
小鹏机器人与小鹏汽车已有的技术栈有着高度重合。源自汽车及自动驾驶长期技术积累,让人形机器人集成多种硬科技。例如在核心处理器方面,小鹏机器人搭载三颗小鹏自研的图灵AI芯,算力2250 TOPs用于提升端侧算力,支持强化学习小模型和分段式端到端架构。

在模型方面,其机器人也会搭载小鹏的物理世界基座大模型VLA架构,引入VLT(视觉-语言-任务/思考)系统,与汽车共享云端AI基础设施,VLT+VLA+VLM高阶大小脑能力组合复杂度远高于自动驾驶。另外,小鹏第五代的人形机器人与小鹏汽车也有高度技术同源性,比如EEA架构、三电系统以及720°鹰眼系统。
在动力系统方面,这次IRON还行业首发应用全固态电池技术,实现极致轻量化,重量降低30%,电量提升30%。小鹏方面表示,全固态电池可抗300G加速度冲击、3mm针刺贯穿不起火,为人形机器人在复杂环境下的安全运行提供保障。还有例如灵巧手是全身最难部件,小鹏搞的这款灵巧手却借助产业链,做到了22自由度,采用超小型16mm谐波关节。
机器人是“软件驱动硬件”,全栈自研无疑最佳路径。公司认为,汽车设计特点是硬件驱动软件,而机器人的软件算法至关重要,是软件驱动硬件设计,因此掌握全栈自研能力的公司有望做出出色的产品,相关能力包括智能硬件、操作系统、大模型、芯片、数据、电池等,需要对各项技术进行融合创新,小鹏无疑是特斯拉之外第一个能够满足的企业。
▍挑战与未来
小鹏计划明年量产数千台机器人,并启动商业化销售。机器人有望成为继AI+智驾、全球化之后小鹏的“第三成长曲线”。
公司认为导览-导购-导巡,是最有可能先落地的场景。经过几年机器人研发,公司认为工厂打螺丝并不适用机器人,矛盾在于灵巧手的寿命;其次,机器人进入家庭家务场景,当前的安全性和泛化能力还达不到要求;导览-导购-导巡则是最容易落地的场景,不需要遥控器,明年有望在门店和工厂中看到相关应用。
同时,小鹏将开放机器人IRON的SDK,与全球开发者共建人形机器人应用生态。宝钢将成为小鹏机器人IRON的生态合作伙伴,在巡检等工业领域探索场景应用。

但笔者仍认为这款机器人量产难度巨大,虽然目前小鹏称IRON机器人预计26年4月份进入量产准备中,2026年底前实现量产。为了推动机器人实现量产和商业化落地,小鹏共10个研发团队,20+合作部门,1000+团队规模共同合作推进。

推荐阅读





×
右键可直接复制图片