 阅读时间大约7分钟(2450字)
阅读时间大约7分钟(2450字)
2026-06-05 2026开年,具身智能的钱流向了哪里?
来源:机器人产业应用
不是平均撒向所有机器人公司,而是明显流向了这几个关键位置。
作者:余柯 编辑:晋芳博 出品:机器人产业应用
前言
2026 年还没过半,具身智能已经成为一级市场最热的赛道之一。
如果只看数字,很容易得出一个简单结论:资本疯了。但如果把 1—5 月公开披露的融资事件拆开来看,会发现钱并不是平均撒向所有机器人公司,而是明显流向了几个关键位置:机器人大脑、数据采集、灵巧手、整机本体和底层基础设施。
这说明资本关注点正在发生变化。过去,大家更容易被“会走路、会跳舞、会搬箱子”的机器人本体吸引;现在,资金开始往产业链更深处钻,去寻找那些真正决定机器人能力上限的环节:谁能让机器人更聪明,谁能提供高质量训练数据,谁能让机器人真正完成复杂操作,谁就更容易拿到下一轮船票。
换句话说,资本正在从“看机器人像不像人”,转向“看机器人能不能真正进入生产和生活”。
01
先看总表:2026年1—5月,钱主要流向了谁?
严格来说,现在还不是完整上半年,所以这里先按2026年1月至5月下旬公开披露信息梳理。不同机构对“具身智能”的统计范围不同,有的会把整机、零部件、数据平台、仿真、芯片都算进去,有的只统计具身智能创业公司,因此融资数量和金额会有差异。
更稳妥的说法是:2026年开年至今,国内具身智能赛道已经进入数百亿元级融资密集期,大额融资和百亿估值公司显著增多。据 21 世纪经济报道援引 IT 桔子、CENTI 不完全统计,2026 年一季度国内具身智能赛道披露融资超 50 起,累计融资额约 200 亿元。

| 表1:2026年1—5月具身智能代表性融资事件梳理
从这张表可以看出,2026 年开年的融资热不是简单的“机器人公司都很热”,而是有明显分层:头部整机继续吸金,机器人大脑估值快速抬升,数据和灵巧手成为上游新入口,仿真与基础设施开始被单独定价。
02
融资热背后:钱不是乱投的
这一轮融资热和前几年最大的不同,是资本不再只看“机器人能不能动起来”,而是更关心三个更实际的问题:
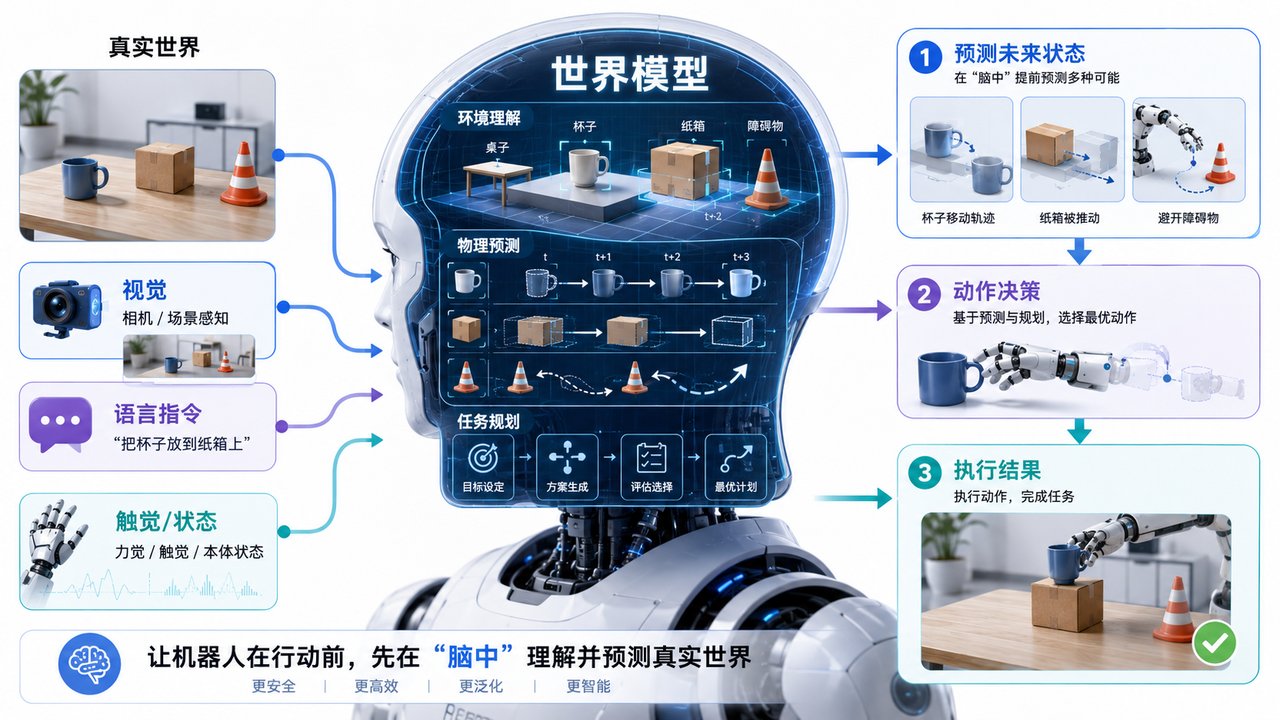
第一,机器人能不能理解复杂环境? 这对应机器人大脑,包括 VLA、世界模型、WAM 和各类具身基础模型。
第二,机器人有没有足够多、足够好的训练数据? 这对应数据采集、遥操作、仿真合成数据和数据平台。
第三,机器人能不能真正干活? 这对应灵巧手、触觉传感、力控、关节模组和整机可靠性。

| 表2:2026开年具身智能融资的主要类型
这也解释了为什么“钱越来越往上游走”。整机固然重要,但决定整机能力上限的,往往是大脑、数据和关键零部件。
03
机器人大脑:资本押注的不只是“世界模型”
过去讲具身智能,最常听到的是 VLA,也就是视觉—语言—动作模型。它解决的是“看到什么、听懂什么、做什么动作”的问题。但真实世界远比图片和文本复杂:杯子会滑落,布料会变形,人会突然走过来。机器人不只是要识别物体,还要理解物理变化,并预判动作后果。

这就是机器人大脑受到资本追捧的原因。资本真正看重的,不是某一个技术名词,而是机器人是否具备三种能力:理解环境、预测后果、规划动作。

| 表3:机器人大脑方向的典型融资案例
因此,2026 年资本押注的不是单一“世界模型热”,而是更大的“机器人大脑热”。有的公司走 VLA,有的强调世界模型,有的提出 WAM,有的更重视真实客户场景。它们路线不同,但目标相似:让机器人不再只是复现动作,而是能在真实世界里理解、判断和执行。
04
数据采集:机器人行业的新“石油”,但不能只写采集
大模型时代有一句话:模型能力取决于数据规模和质量。放在具身智能里,这句话更残酷。
文本数据可以从互联网获得,图像和视频也相对容易收集,但机器人真正需要的是“带动作、带力、带结果反馈”的真实物理交互数据。一个人把杯子拿起来,对人来说很简单;对机器人来说,里面包含视觉识别、手眼协调、抓取力控制、轨迹规划、失败恢复等一整套信息。

所以,2026 年数据采集突然变成融资核心。但这里不能只写“采集”,因为具身数据产业链已经开始分层。

| 表4:数据采集方向的分类与代表企业
这意味着,具身智能的数据竞争,不是简单地“多采一点视频”,而是围绕真实交互、遥操作、仿真合成、数据清洗与评测形成一整套工业化系统。
未来真正有价值的公司,可能不是单纯拥有一批采集员,而是能把数据变成标准化、低成本、可复用的基础设施。谁能做到这一点,谁就有机会成为机器人时代的“数据底座”。
05
灵巧手:机器人落地的“最后一厘米”
如果说机器人大脑决定机器人“会不会想”,数据决定机器人“能不能学”,那么灵巧手决定机器人“能不能干”。
人形机器人会走路、会转身、会说话,当然吸引眼球。但真正进入工厂、仓库、商超、家庭之后,最关键的往往不是“走得像不像人”,而是能不能稳定抓取、拧瓶盖、折衣服、插线、分拣、装配。大量任务最后都落在手上。

这就是灵巧手被资本追捧的原因。它不是一个普通零部件,而是集成了微型传动、柔性结构、力控、触觉传感、运动控制和强化学习的高壁垒系统。

| 表5:灵巧手方向的典型案例
资本喜欢灵巧手,还有一个现实原因:它比整机更容易先商业化。人形机器人整机大规模进入家庭可能还需要时间,但灵巧手可以先卖给实验室、工业机械臂、机器人整机厂商和科研机构。
也就是说,它不一定要等人形机器人完全爆发,自己就能先形成收入。未来,灵巧手公司可能会像新能源汽车时代的电池、电机、激光雷达供应商一样,成为具身智能产业链里的关键上游。
06
资本抢筹的逻辑:不是投机器人,而是投“产业控制点”
把 1—5 月的融资事件放在一起看,资本抢筹的逻辑就会慢慢浮现出来。
资本不是只在投“机器人”,而是在投几个未来可能掌握行业话语权的位置:机器人大脑控制智能上限,数据采集控制模型进化速度,灵巧手控制真实操作能力,整机本体控制场景入口,底层仿真和芯片控制长期成本。
这也是为什么 2026 年融资开始向上游和底层集中。资本已经意识到,未来具身智能的竞争,不只是“谁造出一台机器人”,而是“谁掌握机器人变聪明、学得快、干得稳的关键环节”。
接下来,资本催化下的具身智能产业链大概率会出现三种变化。
第一,头部公司会越来越大。机器人大脑、整机训练和场景交付都很烧钱,资金会继续向少数头部企业集中。中小团队如果只做一个普通人形本体,会越来越难讲出差异化故事。
第二,上游零部件和数据基础设施会变得更重要。灵巧手、触觉传感器、关节模组、仿真平台、数据采集系统,都可能成为具身智能时代的“卖铲人”。这些公司未必最出圈,但可能更早形成收入。
第三,整机厂会从“全栈自研”转向“生态协同”。早期全栈自研有利于技术闭环,但量产阶段需要成本、交付和供应链效率。未来可能出现类似新能源汽车的分工格局:有的公司做整机品牌,有的公司做基础模型,有的公司做数据平台,有的公司做关键零部件。
2026 年开年的具身智能融资热,很像一场提前响起的发令枪。资本先冲进来了,估值先抬起来了,故事也先讲热了。
但机器人行业和互联网不同,它没有办法只靠流量、补贴和概念完成闭环。机器人最终要面对的是更硬的考题:能不能连续工作,能不能控制成本,能不能稳定交付,能不能真的替人解决一个具体问题。

推荐阅读




×
右键可直接复制图片